 首页 > 新闻中心
首页 > 新闻中心
首页 > 新闻中心

室内定位的基本原理:在室内环境无法使用卫星定位时,使用室内定位技术作为卫星定位的辅助定位,解决卫星信号到达地面时较弱、不能穿透建筑物的问题。**终定位物体当前所处的位置。室内位置解算分为终端侧解算和网络侧解算两种。其中,终端侧解算是指不经过网络传输,终端可直接解析其自身位置,室外以GNSS为**,室...

超宽带(UWB)定位技术是一种高精度的定位技术,通过发送具有特定频谱的短脉冲信号并测量其到达时间和信号强度等参数,实现对物体或人员位置的准确定位。UWB定位技术具有多项优势。首先,它可以提供高精度的定位结果,通常在几厘米到数厘米的范围内。这使得在需要精确定位的场景中,如隧道施工、室内导航等,UWB定...

轨道交通防撞雷达是现代轨道交通系统中的关键技术之一。它通过利用先进的传感器技术,实时监测列车前方的障碍物,如其他列车、车辆和行人,以防止碰撞事故的发生。轨道交通防撞雷达具备高精度和快速响应的特点,能够准确探测前方障碍物的位置和距离。一旦系统检测到潜在碰撞风险,它将立即向驾驶员和相关操作人员发出警报,...
隧道人员定位系统为隧道环境提供了高精度的人员定位解决方案。系统不仅实现了人员的实时定位,还具备轨迹跟踪、考勤及出入隧道管理、区域管理和统计报表等多项管理功能。通过实时确定人员的准确位置,该系统能够规范人员的安全行为,并为安全管理提供了有力的支持。同时,整个系统在复杂的隧道环境下也能适应强电磁干扰、多...
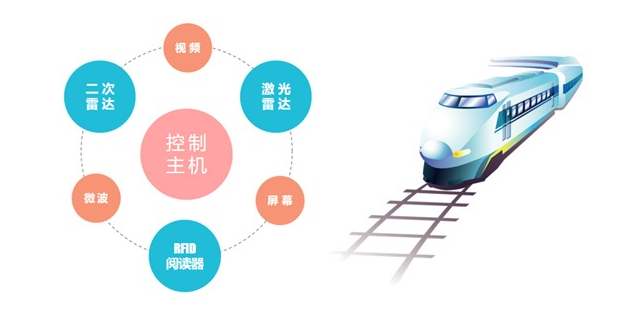
列车防碰撞雷达预警系统采用无线电高精度测距技术和组网通信技术,对列车运行前方区间进行实时测量和信息提取,及早预判危险,提前预警,该雷达预警距离长,全路段使用无障碍,弯道无盲点,**远距离可达到2000米,与现有列车信号系统互不影响等特点。采用二次雷达技术,根据距离和速度的关系进行实时报警,系统可接入...
UWB技术与极短脉冲、无载波、时域、非正弦、正交函数和大相对带宽无线/雷达信号是同义的。UWB脉冲通信由于其优良、独特的技术特性,将会在无线多媒体通信、雷达、精密定位、穿墙透地探测、成像和测量等领域获得日益广泛的应用。UWB的主要指标如下:频率范围:3.1GHz~10.6GHz;系统功耗:1mW~4...

UWB实用精度能达到多少?如何理解其他5-10cm精度宣传?用户在项目需求前期,应该对UWB定位有理性的思考,不能将市场上大部分供应商宣传的5-10cm精度作为能够获取的稳定精度。一般定位精度取决于采集芯片、引擎算法,以及不同场景的信号、网络可靠性等。依据我们多年的经验,以及芯片供应商、引擎供应商的...

轨道交通防撞雷达是现代轨道交通系统中的重要安全技术,用于预防碰撞事故。该技术利用先进的传感器和算法,实时监测轨道上的障碍物,如其他列车、车辆或行人,以提供准确的预警和避免碰撞的措施。轨道交通防撞雷达具有高精度和快速响应的特点,能够准确探测前方障碍物的位置和距离。该技术的应用可以提高轨道交通系统的安全...

室内定位的基本原理:在室内环境无法使用卫星定位时,使用室内定位技术作为卫星定位的辅助定位,解决卫星信号到达地面时较弱、不能穿透建筑物的问题。**终定位物体当前所处的位置。室内位置解算分为终端侧解算和网络侧解算两种。其中,终端侧解算是指不经过网络传输,终端可直接解析其自身位置,室外以GNSS为**,室...
列车防撞雷达典型特性如下,高精度:基于Chirp小孔径雷达宽带脉冲测量体制,通过基于时间机制的双向对称TOF测量技术,实现稳定的1~3m实用测量精度;多场景:支持1D防碰撞、ZONE识别应用,可升级2D系统级定位;**快测量:TOF单次测量时间小于1.8ms,其中无线电带宽占用时间*0.7ms;**...

室内定位应用领域包括:隧道管廊、地下矿井,包括矿井、隧道、管廊等施工场景,其特点是工作危险系数较高,并且传统的卫星信号以及无线电信号无法覆盖。由于危险系数比较高,因此也有对于人员进行精细定位的需求。建筑施工,在建筑施工行业采用UWB定位技术结合其他的一些技术方案,可以实现现场进度可控、减少浪费、提高...
列车防撞分为两个层面,一个是远距离的列车预警反应,一个是近距离障碍物探测。后者利用激光或者长短焦摄像头进行远端图像探测,小型障碍物、大型障碍物探测距离大约200-350m左右,容易受到雨雾天气影响。前者其实比较重要,利用无线电应答机制,构成一个超过1km的车车通讯式的二次雷达探测系统。目前距离可以做...