-
山西进口激光测距传感器代理品牌

激光测距传感器的工作原理是利用激光脉冲发射出去,然后接收脉冲被目标物体反射回来所需的时间来计算距离。具体来说,它通过以下步骤来测量距离:发射激光脉冲:传感器发射一个短暂的激光脉冲,该脉冲朝...
查看详细 -
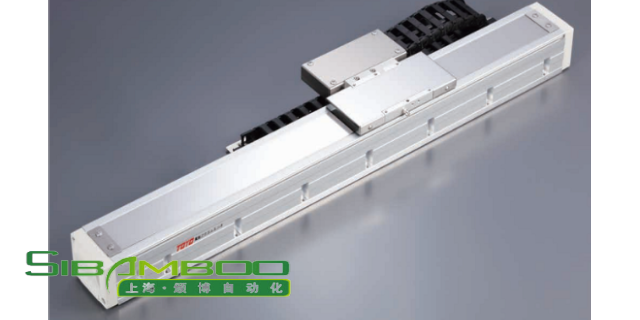
福建丝杆伺服模组价格
伺服模组中常见的控制模式具体如下:转矩控制:这种模式下,伺服电机的输出转矩由外部模拟量输入或直接地址赋值来设定。它主要应用于需要严格控制转矩的场合,如张力控制、扭矩测试等。速度控制:速度控...
查看详细 -
上海伺服模组产品介绍

伺服模组通常支持多种运动模式。这些模式包括但不限于速度模式、位置模式和转矩模式。在速度模式下,伺服模组可以控制电机转子每分钟转动的圈数。位置模式则允许伺服模组精确控制电机转子停留在一个特定...
查看详细 -
山西劳意测直线电机供应商家
加速度(Acceleration):加速度决定了电机达到比较大速度所需的时间,对于动态响应性要求高的应用尤为重要。较高的加速度可以提高生产效率和响应速度。行程长度(StrokeLength...
查看详细 -
山东进口直线电机供应商家
直线电机与传统的旋转电机相比具有以下优势:直接产生直线运动:直线电机可以直接产生直线运动,无需转换机械运动,简化了传动系统,减少了能量损失和机械部件的磨损。高精度和高速度:直线电机通常具有...
查看详细 -
河北倍加福激光测距传感器销售

激光测距传感器在工业制造、机器人技术、建筑测绘和医疗影像等领域中较为常见,并且它适用于户外或恶劣环境下的测量任务。激光测距传感器因其高精度和快速响应的特点,在多个领域得到了较广的应用。具体...
查看详细 -
安徽倍加福微型电缸产品介绍
微型电缸的耐用性通常较高,尤其是在需要频繁启停的应用中。这得益于它们的设计原理和制造工艺,使得它们能够承受重复的启动和停止而不会损害其性能。微型电缸的耐用性主要体现在以下几个方面:高精度和...
查看详细 -
江苏机械手伺服模组代理品牌
伺服模组的基本工作原理是实现物体的位置、方位或状态的精确控制,使其能够跟随输入指令的变化。伺服模组通常由伺服电机和控制器组成,它们共同工作以实现精确的定位和速度控制。以下是伺服模组工作原理...
查看详细 -
河南西克直线电机品牌
直线电机技术的较新发展趋势主要表现为对高效、高精度和高可靠性的持续追求,同时也反映了对于节能减排和智能制造的深刻响应。以下是一些主要的发展趋势:首先,是技术水平的不断提升。在直线电机的设计...
查看详细 -
江苏激光测距传感器
激光测距传感器相比于其他测距技术(如超声波测距、红外测距等)具有以下优势:高精度:激光测距传感器通常具有更高的精度,可以实现毫米级别甚至更高的测量精度,比超声波和红外测距技术更准确。远距离...
查看详细 -
西克光电传感器联系方式
在光电传感器的设计和使用中,避免常见错误和问题的方法如下:保持供电稳定:确保传感器的电源供应是稳定的,避免因供电不正常而导致的性能不稳定或损坏。控制检测频率:避免设置过快的检测频率,以免超...
查看详细 -
东佑达伺服模组价格

伺服模组的基本工作原理涉及传感器、控制器和执行器等多个关键组件的协同工作。以下是其工作原理的详细解释:首先,传感器负责检测并测量伺服模组系统的当前状态。这些传感器可以监测位置、速度、加速度...
查看详细