
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
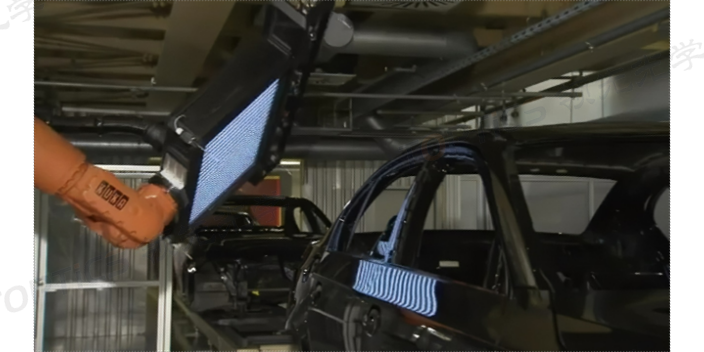
图像处理单元通过使用一系列算法对图片进行处理,获得缺陷3D或2D特征,通过与数据库比对之后,获得缺陷位置、分类、尺寸等信息,然后将数据进行输出。漆膜缺陷自动检测系统构成汽车车身长度一般在~m,宽度在~m,而且车身曲面多,结构比较复杂。为了能将车身外表所有区域都覆盖到,需要增加光源和相机数量或者将光源和相机安装在机器人等可移动设备上,目前研究和应用较多的主要有以下2种结构:1)将光源和CCD相机安装到包围车身的钢结构框架上,通过增加光源和CCD相机数量的方式覆盖整个车身。这种结构的优点是结构简单,调试时只需要调整相机角度,耗时短。缺点是柔性低,不同的车型外形有较大差异时不能通用。2)将光源和CCD相机集成到布置在车身两侧的机器人手臂上,使用2台以上的机器人,可以增加行走轨道扩大检测区域。此结构优点是机器人相对灵活,对车身外表任何区域都可以进行拍摄,柔性高,不同车型可混线检测。缺点就是系统结构复杂,检测一台车的时间相对第一种结构要长。能在40~60JPH的涂装生产线上,用来检测直径mm的缺陷。4台机器人并联使用,每台机器人都安装了1个大尺寸的显示器和4台200万像素的相机,每台相机在一个检测位置会拍摄8张图像。实现车身A区、B区的漆面全自动检测,检出率高达99%以上。本溪汽车面漆检测设备生产厂家
汽车面漆检测设备
所述凹槽54内的所述第三转轴51末端固定设置有与所述凹槽54端壁上固定设置的内齿圈52啮合的第三齿轮53。有益地,所述联动装置98包括所述机身10顶壁内设置的转动腔33,前后两个所述diyi转轴22均贯穿所述转动腔33且所述转动腔33内的所述diyi转轴22外表面固定设置有限位块24,所述转动腔33内可转动的设置有与前后两个所述蜗轮34均啮合的蜗杆32,所述转动腔33顶壁内可转动的设置有与所述手动轮27固定连接的第四转轴31,所述转动腔33内的所述第四转轴31末端固定设置有与所述蜗杆32外表面固定设置的第三锥齿轮29啮合的第四锥齿轮30,手动转动所述手动轮27半周,此时所述第四转轴31带动所述第四锥齿轮30转动,从而带动所述第三锥齿轮29转动,从而带动所述蜗杆32转动,从而带动所述蜗轮34转动,所述蜗轮34转动带动所述diyi转轴22转动半周。有益地,所述转动腔33左右两侧对称设置有储液腔28,左右两个所述储液腔28分别盛放油漆与抛光液,左右两个所述储液腔28之间固定设置有三通阀56,所述三通阀56左右两侧通过所述diyi连通管55与所述储液腔28连通,所述三通阀56底部通过所述第二连通管57连通所述储液腔28。趋势性汽车面漆检测设备质量好价格忧的厂家漆面好坏同样决定着产品质量及品牌形象,因此针对漆面质量检测也是整车出厂前的重要检验项。

检测算法识别漆面缺陷的过程分以下4步:图像采集、预处理、特征提取和分类决策.图像采集是指通过检测系统获取到的车身不同部位漆面的图像信息。预处理主要是指图像处理中的灰度化处理图像滤波、裁剪分割、形态学处理等操作.去除非必要检测区域,加强图像的重要特征,使缺陷特征更容易被提取出来。特征提取是指采用某种度量法则,进行缺陷特征的抽取和选择,简单的理解就是将图像上的漆面缺陷与正常漆面,利用某种方法将它们区分。分类决策是指构建某种识别规则,通过此识别规则可以将对应的特征进行归类和判定,主要应用手漆面缺陷的分类.以指导后续的打磨抛光操作。目前,常用的漆面缺陷检测算法主要分为2类:传统图像算法和深度学习算法。这2种算法的主要区别在于特征提取和分类决策的差异。
这种漆膜缺陷自动检测技术有速度快、效率高、精度高、检测范围广以及稳定性强等优点。本文主要对漆膜缺陷自动检测技术原理、特点以及在汽车涂装工业中的应用进行介绍和总结。1汽车车身漆膜缺陷和人工检查汽车面漆喷涂工艺及漆膜构成随着喷涂技术的发展,汽车面漆喷涂工艺经历了从3C2B传统喷涂工艺、3C1B“湿碰湿”工艺到B1B2免中涂工艺的过程,喷涂材料也由溶剂型逐渐发展到水性,喷涂设备主要使用手工喷枪、往复机、机器人静电旋杯喷涂等。绝大部分的金属底材汽车车身漆膜都可以归纳为图1所示的构成。漆膜缺陷种类漆膜缺陷细分有上百种之多,根据产生的原理和相似性可以大致归纳为以下几类:1)颗粒、异物等附着导致漆膜表面突起的缺陷;2)表面张力不同而导致的缩孔类缺陷;3)流挂类缺陷;4)针式;5)气泡;6)沾污、斑点类缺陷;7)颜色缺陷,包括目视色差、发花、遮盖不良等;8)外观不良,包括橘皮、失光等;9)打磨不良导致的缺陷,包括打磨痕、抛光斑等;10)漆膜划伤、磕碰或部分脱落导致的缺陷,包括划痕、磕伤和漆膜脱落等缺陷。人工漆膜缺陷检查和修饰在涂装生产过程中,这些缺陷产生的区域、严重程度各不相同,因此处理方式也相应地有不同的标准。漆面缺陷检测,能正确辨别细微颜色差异,抽取凹凸消除光晕,轻松选择光源颜色.我们提供完备的解决方案。

15s内采集3000帧图像,使用不同角度光线检查车身漆面情况,数据表明此套系统可改善82%车身喷涂质量和客户满意度。2、德国宝马2007年宝马Dingolfing工厂针对reflectCONTROL漆膜缺陷检测系统进行测试,其视觉系统由一台大屏和四台200w相机组成,每个位置采集8帧图像,通过4台机器人并联使用。终在60s节拍内完成30个位置检测,检出率在98%以上(缺陷小直径)。3、德国梅赛德斯-奔驰2007年奔驰Rastatt工厂使用ISRAVISION公司CarPaintVision系统进行缺陷检测测试,每套系统含两个侧面机器人和一个水平面机器人,在60s节拍内完成全车扫描,终获得(缺陷小直径)。总结基于机器视觉的自动化漆面缺陷检测系统,不受人工主观性和汽车颜色等外界环境的影响,极大地提高了生产效率并改善了喷涂质量。基于偏折光学的大型反射面汽车玻璃及面漆的测量设备。宜昌快速汽车面漆检测设备推荐
基于计算机视觉的表面缺陷自动检测作为一种快速发展的新型检测技术,具有速度快、效率高等优点。本溪汽车面漆检测设备生产厂家
汽车涂装是汽车生产制造过程中至关重要的一个环节,进行涂装后的车身需进行表面漆膜缺陷的检测和修饰。传统的工业线缺陷检测系统采用人眼初检和人工复检,由于受到人眼分辨率、分辨速度及检验工人主观意识的影响,且长时间的密集工作以及白色灯光的反射会导致工人的视觉疲劳,人工检测的效率并不高,常有漏检的现象发生。我公司外针对车身漆膜缺陷检测的研究现状,总结并分析了现有的传统目标检测算法及基于深度学习的目标检测算法的优劣,提出了一种基于视觉的车身漆膜缺陷自动检测与分类方法,该方法能有效改进传统人工目视检测的不足,提高汽车车身漆膜质量。研究内容主要包括以下几点:(1)通过在汽车涂装车间质检流水线的数据采集,获得车身漆膜缺陷样本集,分析常见的车身漆膜缺陷种类及其形态学特征,提出了一种样本集的离线数据增强策略,使用该策略对样本集进行增强并建立了车身漆膜缺陷数据库;(2)通过对SSD算法的研究,提出了一种改进的MobileNet-SSD算法,从网络结构和匹配策略两方面对SSD算法进行了改进;(3)设计并实现了车身漆膜缺陷自动检测及分类系统,通过Web服务器的形式为用户提供车身漆膜缺陷检测与分类的服务,保证用户无论使用什么系统及设备均可得到相同的用户体验。本溪汽车面漆检测设备生产厂家
领先光学技术(江苏)有限公司成立于2019年,公司总部地址位于武进区天安数码城内独栋12-2#写字楼。我们的种子企业“ling先光学技术(常熟)有限公司”成立于2014年,是国家高新技术企业、科技型中小型企业、江苏省民营科技企业、雏鹰企业。知识产权80余项(发明专利8项)。内核团队:教授2名、博士2名、行业渠道关键人4人。长期稳定与复旦大学、大连理工大学合作。底层技术包括:光学(相位偏折、白光干涉、白光共焦、深度学习);MicroLED(发光器件、透明显示、微型投影)。是做一件“利用光学进行工业质量检测设备的生产和制造”。自主开发光学系统和底层内核算法,拥有十年以上行业经验,主要应用于:汽车玻璃检测行业、片材检测行业、半导体材料检测行业,我们的战略新产品:微米级光刻机已经完成版流片,也正在一步步趋于稳定和成熟。公司在科技的浪潮中,已经具有将内核技术转化为产品的经验与能力。公司是高科技、高成长性企业,公司不断的夯实自身技术基础,愿成为中国工业发展中奠基石的一份子,打破国外的智能装备的,树名族自有高技术品牌。
单一的2d成像方式和检测方法难以应对常见的缺陷,对所有缺陷同时的检测,往往需要2d成像方式和3d成像方式相互结合。3d成像方式中激光三角法和条纹投影,是对高度的重建。基于条纹投影原理的三维重建设备,主要应用于漫反射物体。激光三角法可以应用于类镜面物体的高度测量,但是难以检测微米级别的缺陷。3d成像方式中,光度立体法和条纹反射(相位测量偏折术)是对梯度的重建。基于朗伯光照模型的光度立体法对漫反射表面的梯度重建精度较高,但很难直接应用于镜面物体。相位测量偏折术对镜面物体的梯度重建精度很高,在原理上可以到达亚微米级别为了验证汽车面漆在各种复杂环境条件下的耐久性和稳定性,老化试验机应运而生。天津光学方...
- 泉州高精度汽车面漆检测设备推荐 2024-11-05
- 吉林汽车面漆检测设备质量好价格忧的厂家 2024-11-05
- 景德镇非隧道式汽车面漆检测设备生产厂家 2024-11-05
- 沈阳全自动汽车面漆检测设备哪家好 2024-11-05
- 太原代替人工汽车面漆检测设备源头厂家 2024-11-05
- 淮南非隧道式汽车面漆检测设备 2024-11-05
- 包头全自动汽车面漆检测设备价格 2024-11-05
- 包头光学方法汽车面漆检测设备 2024-11-05
- 平顶山代替人工汽车面漆检测设备源头厂家 2024-11-05
- 武汉快速汽车面漆检测设备 2024-10-28



- 山东代替人工汽车面漆检测设备 2024-10-27
- 本溪光学方法汽车面漆检测设备品牌 2024-10-27
- 江苏光学方法汽车面漆检测设备 2024-10-27
- 太原全自动汽车面漆检测设备推荐 2024-10-27
- 沈阳偏折光学法汽车面漆检测设备推荐 2024-10-27
- 三明光学方法汽车面漆检测设备供应商家 2024-10-27





- 南京在线玻璃面型检测公司 11-07
- 盐城光学算法配镜机器人推荐 11-07
- 高亮面检测设备公司 11-07
- 温州微纳检测设备生产厂家 11-07
- 嘉兴平坦度检测设备生产厂家 11-07
- 上海高精度配镜机器人公司 11-07
- 无锡高铁玻璃面型检测 11-07
- 金华高亮面检测设备生产厂家 11-07
- 杭州平面度检测设备供应商家 11-07
- 硅片抛光面检测设备咨询 11-07