
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
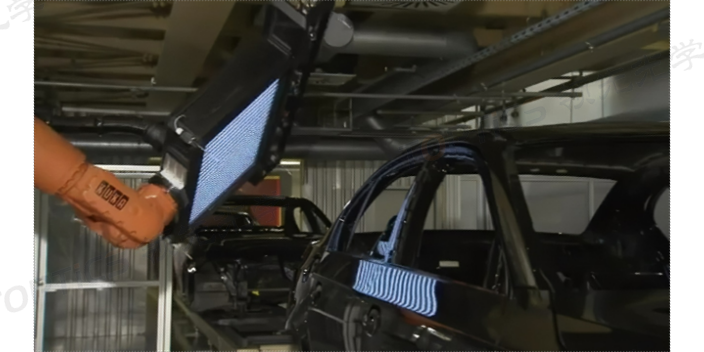
机器人式缺陷检测系统采用机器人来布置光源和相机。该系统的检测硬件由4台搭载检测单元的机器人组成,安装在面漆烘房出口的在线检查工位。检测单元将光源和相机集成在一个单元中.亮点是一块可显示不同光源模式的LED显示屏。车身的每一处位置会通过不同的光源模式(单色光、条纹光等)在不同方向上进行多次检测,通过叠加采样实现2D图像+3D轮廓的图像识别方式。机器人式缺陷检测系统可以实现小,比较大可实现单线60JP1的检测能力,单线投资1500~2000万元。机器人式缺陷检测系统识別精度高,受益于其多次检测+叠加采样的图像采集方式,对于凹凸、缩孔等3D缺陷识别效率较高。但鉴套系统结构较复杂,1个检测站需要配置4台机器人,针对多车型需要分别进行轨迹示教,投资维护成本较高。 基于计算机视觉的表面缺陷自动检测作为一种快速发展的新型检测技术,具有速度快、效率高等优点。襄阳快速汽车面漆检测设备源头厂家
汽车面漆检测设备
并且在车上运行到返修线时,其结果信息会通过液晶显示屏进行明确展示,工人可以直接根据显示器指示的位置、颜色、等级进行修补,比如红色、橙色、蓝色就分别表示了B、C1和C级等不同的缺陷。3自动检测技术的评价结果分析相比较人工检测,自动检测系统在缺陷检出率上有着显着提升,这得益于自动检测技术中机器视觉系统的高精度识别能力。同时,在不同颜色车辆的检测过程中,人工检测会更容易受到颜色的影响,在浅色系车身涂装的检测中往往检出率会大幅下降,而自动检测技术同样在机器视觉的智能调节系统下,保证了不同颜色油漆下的稳定缺陷检测。为进一步对比自动检测系统的检测效果,车辆质保专业部门可以针对自动检测与人工检测的结果进行统计分析,如图1中显示,在缺陷漏检统计方面,人工检测的漏检情况更多,而自动检测技术的检测精度明显更高。为进一步建立自动检测系统准确性的定量分析指标,需要对自动检测系统的评价指标量进行深化,即通过缺陷检出率明确实际检测效能,通过系统单车误报结果展示检测系统的精确度。其中检出率主要表现系统的缺陷识别能力,单车误报则主要表现其检测精确度,即当系统检测存在缺陷时,实际查看时却并无缺陷的情况。哈尔滨代替人工汽车面漆检测设备供应商家检测系统可对完全喷涂后的车身、ED涂层车身或外部零件上的所有质量相关缺陷进行检测和分类。

所述凹槽54内的所述第三转轴51末端固定设置有与所述凹槽54端壁上固定设置的内齿圈52啮合的第三齿轮53。有益地,所述联动装置98包括所述机身10顶壁内设置的转动腔33,前后两个所述diyi转轴22均贯穿所述转动腔33且所述转动腔33内的所述diyi转轴22外表面固定设置有限位块24,所述转动腔33内可转动的设置有与前后两个所述蜗轮34均啮合的蜗杆32,所述转动腔33顶壁内可转动的设置有与所述手动轮27固定连接的第四转轴31,所述转动腔33内的所述第四转轴31末端固定设置有与所述蜗杆32外表面固定设置的第三锥齿轮29啮合的第四锥齿轮30,手动转动所述手动轮27半周,此时所述第四转轴31带动所述第四锥齿轮30转动,从而带动所述第三锥齿轮29转动,从而带动所述蜗杆32转动,从而带动所述蜗轮34转动,所述蜗轮34转动带动所述diyi转轴22转动半周。有益地,所述转动腔33左右两侧对称设置有储液腔28,左右两个所述储液腔28分别盛放油漆与抛光液,左右两个所述储液腔28之间固定设置有三通阀56,所述三通阀56左右两侧通过所述diyi连通管55与所述储液腔28连通,所述三通阀56底部通过所述第二连通管57连通所述储液腔28。
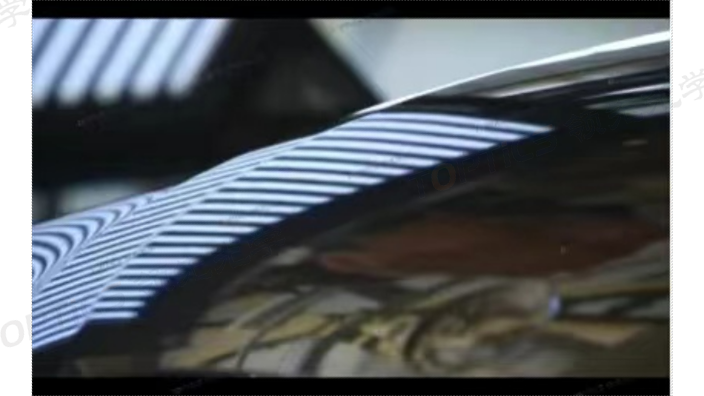
剔除、筛选原则依据两点间距进行,若两点间距小于等于物方视场的一半大小时,则保留为同一幅视场覆盖范围点;若两点间距超出物方视场的一半大小时,则保留为不同幅视场覆盖范围点;通过上述原则得到系列采样点,从而完成对汽车表面轮廓定位检测划分规划。检测时,检测机械手臂带动漆面视觉检测模组至被检测汽车表面的采样点,漆面视觉检测模组中的三个测距传感器分别测量当前漆面视觉检测模组与被检测汽车表面的距离值,通过三个测距传感器获得的三组距离值,根据三组距离值调整检测机械手臂以保证三套成像镜头相机组成像清晰;调整完成后,大尺寸条纹投影屏投影条纹至被检汽车表面,通过n套成像镜头相机组拍摄条纹图像;大尺寸条纹投影屏投影出的条纹包括横、竖90°正交的两组条纹组,其中横条纹组包含不同间距的多条横条纹,竖条纹组包含不同间距的多条竖条纹;n套成像镜头相机组(可拍摄采集到横条纹图像组与竖条纹图像组;条纹图像采集完成后,关闭大尺寸条纹投影屏,打开均匀漫射发光板,利用n套成像镜头相机组拍摄被检测汽车表面图像,得到漫射均匀图像;再通过汽车漆面图像处理提取出被检测汽车表面的外观缺陷。汽车漆面图像处理具体包括以下步骤:步骤。机器视觉是图像分析技术,通过使用光学系统、工业数字相机和图像处理工具,来模拟人的视觉能力。
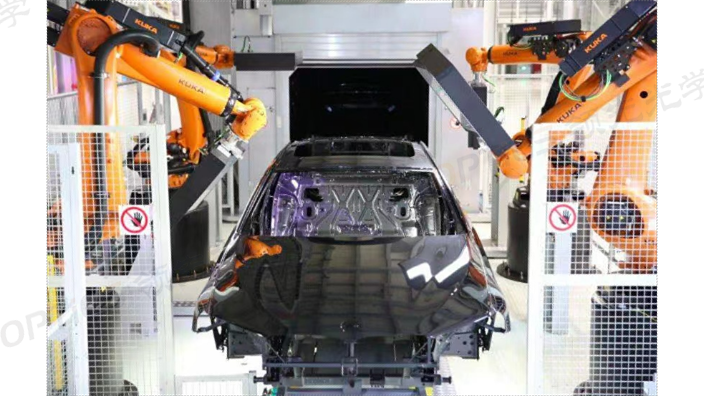
汽车漆面缺陷主要有颗粒流排划痕等,漆面缺陷检测系统是利用机器模拟人眼的视觉功能,辅助完成漆面缺陷的检测和判断工作。漆面缺陷检测系统通常由前端采集传输和后端处理显示2部分组成。前端采集传输主要是通过工业相机完成整车漆面图像的采集和传输,后端处理显示主要是针对漆面缺陷图像进行数据处理、分析分类和终端显示。系统硬件主要包括光源、工业相机、视觉处理器以及机器人等,系统软件主要包括视觉分析系统和运动控制系统等。系统对漆面缺陷检测的过程和结果全程保存在本地电脑数据库上,同时可以与车间管理系统对接,实现检测结果的分类查询、汇总分析等功能。主流的漆面检测技术路线分为2类,一类是隧道式缺陷检测系统,另一类是机器人式缺陷检测系统。隧道式和机器人式缺陷检测系统的共同点在于均为镜面反射成像原理,支持颗粒流挂划痕等漆面缺陷的检测,但受制于光学成像的局限性,车身遮挡区域及外板边缘10mm无法检测。 公司的产品和专业技术还被广泛应用于半导体和光电行业的重要领域以及其它半导体材料的市场。武汉偏折光学法汽车面漆检测设备价格
这一具有革新意义的系统利用机器视觉来提升汽车行业的质量控制。襄阳快速汽车面漆检测设备源头厂家
本发明涉及汽配领域,尤其是一种汽车外漆修补抛光一体机。背景技术:随着社会的进步和经济的发展,汽车进入了千家万户,汽车再驾驶过程中难免存在磕碰划痕,传统的划痕修补方法需要将划痕周边贴上纸张避免补漆时造成周边汽车表面油漆被污染,这种方法操作不便且容易损坏汽车表层油漆,传统的补漆设备需要人手动喷涂,导致喷涂不均匀,因此有必要设置一种汽车外漆修补抛光一体机改善上述问题。技术实现要素:本发明的目的在于提供一种汽车外漆修补抛光一体机,能够克服现有技术的上述缺陷,从而提高设备的实用性。本发明解决其技术问题所采用的技术方案是:本发明的一种汽车外漆修补抛光一体机,包括机身以及设置于所述机身底壁内开口向下的转动腔,所述转动腔圆周壁内设置有开口向下的环形滑槽,所述环形滑槽内可滑动的设置有用于防止油漆扩散的密封罩,所述密封罩与所述环形滑槽顶壁间设置有顶压弹簧,所述转动腔内可转动的设置有转动架,所述转动架底壁内设置有左右对称两个开口向下的滑动槽,所述滑动槽内可滑动的设置有滑动块,左右两个所述滑动槽之间设置有传动腔,所述传动腔内可转动的设置有螺纹套,所述螺纹套内设置有左右贯通的螺纹孔。襄阳快速汽车面漆检测设备源头厂家
领先光学技术(江苏)有限公司成立于2019年,公司总部地址位于武进区天安数码城内独栋12-2#写字楼。我们的种子企业“ling先光学技术(常熟)有限公司”成立于2014年,是国家高新技术企业、科技型中小型企业、江苏省民营科技企业、雏鹰企业。知识产权80余项(发明专利8项)。内核团队:教授2名、博士2名、行业渠道关键人4人。长期稳定与复旦大学、大连理工大学合作。底层技术包括:光学(相位偏折、白光干涉、白光共焦、深度学习);MicroLED(发光器件、透明显示、微型投影)。是做一件“利用光学进行工业质量检测设备的生产和制造”。自主开发光学系统和底层内核算法,拥有十年以上行业经验,主要应用于:汽车玻璃检测行业、片材检测行业、半导体材料检测行业,我们的战略新产品:微米级光刻机已经完成版流片,也正在一步步趋于稳定和成熟。公司在科技的浪潮中,已经具有将内核技术转化为产品的经验与能力。公司是高科技、高成长性企业,公司不断的夯实自身技术基础,愿成为中国工业发展中奠基石的一份子,打破国外的智能装备的,树名族自有高技术品牌。

仓储应该融入到供应链上下游之中,根据供应链的整体需求确立仓储的角色定位与服务功能。从仓储的运营主体分析,可分为工商企业内部仓储与社会公共仓储。从供应链的上下游分析,可分为原材料供应仓储、产成品中转仓储与末端配送中心。根据物品特性及其仓储条件的不同,可分为物品特性相近且对仓储条件没有特殊要求的通用仓储与物品特性明显且对仓库建筑、温湿度、安全设施以及储存方法等有特殊要求的专业仓储,东风汽车的仓储系统设计的业务包括分公司生产部的总装作业部、销售公司的检查储运部和营销部。从总装作业部整车下线开始,直至商品车发车为止。这些设备不仅提升了检测精度,还dada提高了生产效率,使得汽车面漆检测步入了一个全新的...
- 本溪汽车面漆检测设备推荐 2024-12-29
- 莆田高精度汽车面漆检测设备供应商家 2024-12-29
- 安徽非隧道式汽车面漆检测设备推荐 2024-12-29
- 泉州全自动汽车面漆检测设备供应商家 2024-12-29
- 鞍山全自动汽车面漆检测设备供应商家 2024-12-29
- 莆田全自动汽车面漆检测设备推荐厂家 2024-12-29
- 平顶山工业质检汽车面漆检测设备哪家好 2024-12-29
- 丹东高精度汽车面漆检测设备生产厂家 2024-12-29
- 南平高精度汽车面漆检测设备品牌 2024-12-29
- 江苏代替人工汽车面漆检测设备生产厂家 2024-12-28



- 鞍山代替人工汽车面漆检测设备推荐厂家 2024-12-28
- 山东代替人工汽车面漆检测设备价格 2024-12-28
- 洛阳偏折光学法汽车面漆检测设备 2024-12-28
- 襄阳工业质检汽车面漆检测设备生产厂家 2024-12-28
- 安徽汽车面漆检测设备生产厂家 2024-12-28
- 上海非隧道式汽车面漆检测设备 2024-12-28




- 鞍山全自动汽车面漆检测设备供应商家 12-29
- 淮安远程配镜机器人供应商 12-29
- 扬州线上配镜机器人供应商 12-29
- 上海远程配镜机器人推荐 12-29
- 连云港配镜机器人供应商 12-29
- 平顶山工业质检汽车面漆检测设备哪家好 12-29
- 丹东高精度汽车面漆检测设备生产厂家 12-29
- 扬州智能配镜机器人哪家好 12-29
- 南平高精度汽车面漆检测设备品牌 12-29
- 江苏代替人工汽车面漆检测设备生产厂家 12-28