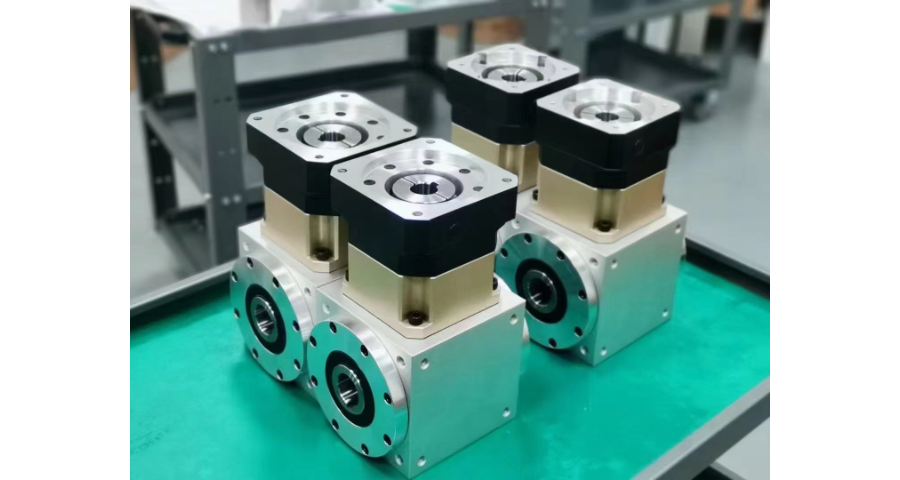
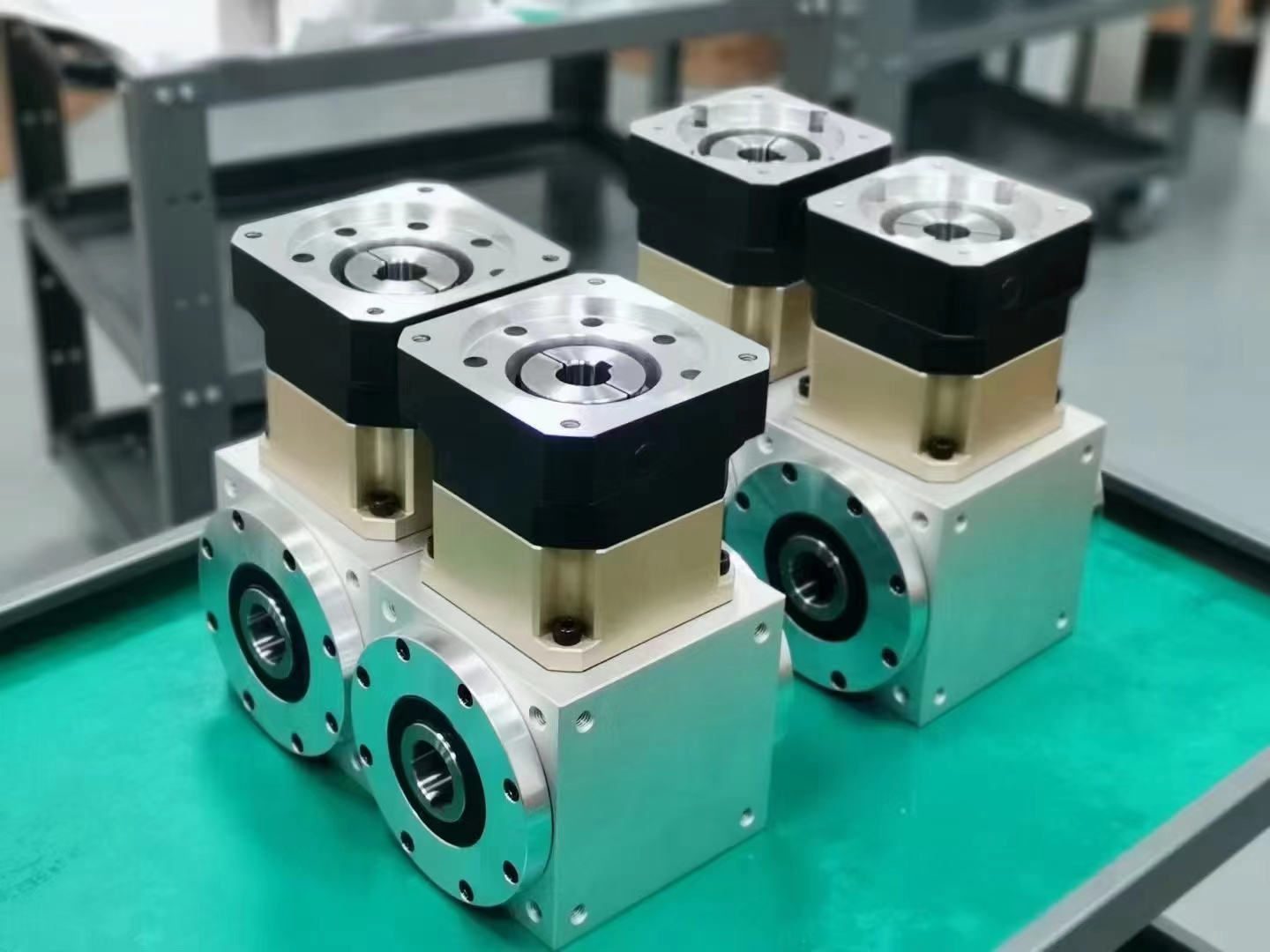
中空轴旋转平台通过电机驱动,实现角度调整自动化。精加工齿轮传动,角度调整无极限。精密轴系设计,保证精密高,承载大;步进电机与传动件通过进口弹性联轴器连接,排除空间和加工形位误差。旋转台面外圈刻度直观;标准接口,方便信号传输;手动手轮配置,电控手动均可。可选装伺服电机或步进电机。中空轴旋转平台可取代DD马达与分割器,在两者之间取得平衡,大幅度降低成本,性新产品,重复定位精度≦5秒,马达轻松配制,承载稳重,可搭配AC伺服马达或步进马达做任意角度分割,可满足分割器无法达到之数位控制,且定位精度可媲美DD马达。中空旋转平台的转盘为中空结构,伺服电机与侧面连接,便于安装气管和电线。山西重载中空旋转平台选型

中空旋转平台实际上和行星减速机一样都是减速机的一款种类,相对来说是一款新型的旋转负载装置,中空旋转平台集效率高、精度高、刚性高、性价高于一身,集伺服马达、凸轮分割器及直驱马达的优点于一体。中空旋转平台采用精度高的齿轮结构和径向轴承,提升了刚性,增大可扭矩,承转更加稳定,配上伺服马达或者步进马达都可以做到对产品进行任何的角度切割,可实现分割器无法满足的位数控制,其展现的准度不比直驱马达差,可在很短的时间内实现惯性负载的定位。中空旋转平台的称谓:中空旋转平台又可以叫做中空旋转平台减速机、高精密旋转平台、中空轴旋转平台、伺服中空旋转平台、马达中空旋转平台中空旋转平台的优点1、使用直连方式可提升可靠性、同时降低成本可直接将需要装置的工作台及机械手臂安装在旋转平台上,与使用皮带轮等机械零件相比,中空旋转平台可减少机械设计、零件调配、皮带状态调整等环节耗费的时间和费用。2、马达配置可自由选配各种品牌步进马达或伺服马达。3、无齿隙的高定位无齿隙,定位精度小于等于1MIN,重复定位精度可达正负5弧秒。4、大口径中空结构配线、配管更方便简洁,在布线复杂的配线、配管环境下此特性的优势尤为突出。上海减速中空旋转平台公司中空旋转平台的特征是什么?

机械旋转平台的发展特点由于中空旋转平台的广泛应用,工业界在它的研究和改进方面做了非常多的努力。下面让我们来了解一下中空旋转平台的发展特点。1.技术含量高中空旋转平台的设计原理比较先进,需要高精度加工以及全自动检测设备。高科技材料的使用以及各项专业技术的运用,都需要极高的技术实力来制造出高质量的旋转平台。2.用途中空旋转平台能够满足许多不同领域的需求,在、航空航天、水下、水上、车辆制造等领域有广泛的应用。而对于同一领域的应用,也可以分为不同的子领域,如领域中的飞机制造、汽车制造等,能够使得制造过程更为完善化。
行星齿轮减速机的几种工作原理 行星减速机是一种应用的减速机,它的主要传动结构为:行星轮,太阳轮,外齿圈,并合着线针齿啮合的转动方式来工作。 由于减速机的这种转动结构,使得它的单级减速一般在3-10之间,常见减速比为:3.4.5.6.8.10 。行星减速机是由针齿啮合来工作转动的,由于行星齿轮的套数一套齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求,但同时2级或3级减速机的长度会有所增加,导致效率会有所下降。中空旋转平台减速机是近几年才流行的自动化装置,市场上的叫法很多,例如:中空旋转台、中空旋转平台减速机、高精密中空螺旋平台减速机、步进旋转平台、伺服旋转台、行星旋转台、旋转器和转向器,指的都是一个产品不同的名称而已。中空旋转平台可以根据需要进行自动化操作,提高工作效率。
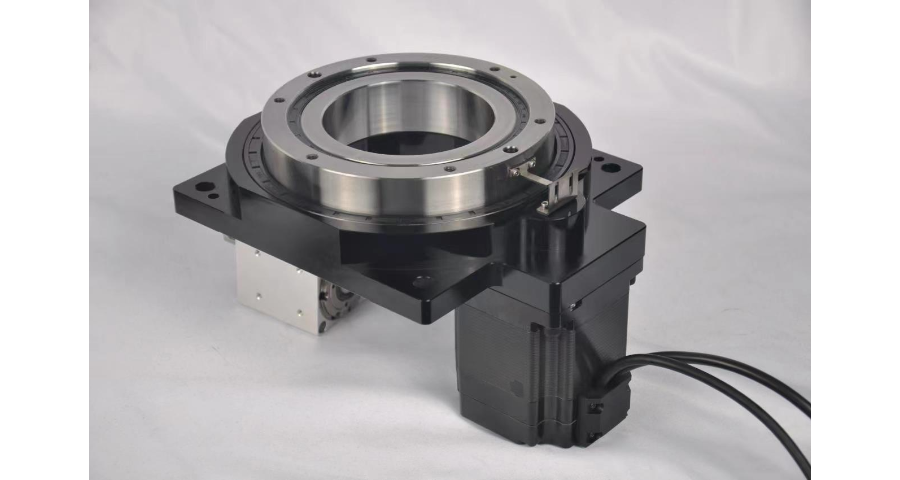
中空旋转平台通过电机驱动,实现角度调整自动化。精加工蜗轮蜗杆或齿轮传动,角度调整无限。精密轴系设计,保证精密高,承载大;步进电机与传动件通过进口弹性联轴器连接,排除空间和加工形位误差。旋转台面外圈刻度直观;标准接口,方便信号传输;手动手轮配置,电控手动均可。 中空旋转平台的选购优点: 1、直接连结:简易设计提升信赖性。 2、大口径中空旋转平台:简洁的配线及配管。 3、定位精细高。 4、短时间定位:可在短时间内实现惯性负载的定位。 5、简单原点回归:省却设计与零件采购的麻烦。中空旋转平台可以根据需要进行定制,满足不同行业的需求。上海高精度中空旋转平台销售
中空旋转平台的转盘为中空结构,伺服电机连接在侧边,便利冶具中的气管、电线安装。山西重载中空旋转平台选型
中空旋转平台名词解析:1,支撑旋转平台的轴承:旋转平台所使用的轴承种类。2,容许转矩:加速转矩、负载变动亦请在此容许转矩以下使用。3,惯性惯量:马达部转子惯性惯量与减速机构部惯性惯量于旋转平台上所换算之值的合计。4,分辨率:意即旋转平台回转1圈所需的脉波数。5,重复定位精度:表示于同样位置从同样方向进行反复定位时,发生多少误差的数值。6,正反转角度误差:意即旋转平台在某个位置从正转方向定位时,与从逆转方向定位时的停止角度差。7,角度传达误差:意即从输入脉波数计算出的旋转平台逻辑上的运转角度与实际运转之差。8,容许推力载重:表示从旋转平台轴方向施加的轴向载重容许值。9,容许惯量载重:施加载重于比旋转平台的中心偏心的位置时,会出现使旋转平台倾斜的力量。此时的中心至偏心量X载重所计算出的值即惯量载重的容许值。10,旋转平台平行度:表示相对于制动器的设备侧安装面,旋转平台的安装面倾斜度。中空旋转平台性能特点:1,工作物可直接锁固2,旋转盘面可直接锁固工作物,提升工件装载之方便性3,配线方便,此旋转平台为中空式设计,无论是配线或配管均方便4,高精度,定位精度小于一分,重复定位精度可达±15sec5,运转动作平稳。 山西重载中空旋转平台选型