电缸的输出力与电机功率之间存在直接的关系。一般来说,电机功率越大,电缸的输出力也越大。这是因为电机的功率决定了电缸的驱动力,而驱动力的大小直接决定了电缸能够产生的力的大小。在选择电缸和电机时,需要考虑实际应用场景下的负载需求。如果负载较重,需要较大的输出力,就需要选择更高功率的电机。同时,还需要考虑电机的转速和减速器的减速比等因素,以确保电缸能够满足实际应用中的推力和速度需求。需要注意的是,电机的功率并不是决定因素。电缸的输出力还受到其他因素的影响,如传动机构的设计和材料、导轨的质量和精度等。因此,在选择电缸和电机时,需要综合考虑各种因素,选择适合自己应用场景的电缸结构。电机的功率和转速之间存在一定的关系,功率和转速之间的关系可以通过电机的工作方程来描述。工作方程可以表示为:P=T*ω,其中P表示功率,T表示转矩,ω表示角速度(转速)。从这个公式可以看出,功率P与转矩T和角速度ω成正比。也就是说,当转矩T一定时,角速度ω越大,功率P也越大。因此,电机的功率和转速之间存在正比关系,转速越大,功率也越大。 电缸的推力输出可以通过外部信号进行实时调整。直销电缸应用
伺服压机和电缸在控制系统和用途上有明显的区别。伺服压机是一种高精度、高效率、高刚性的液压机床,由液压系统、传动系统和控制系统三部分组成。它通过数字信号控制系统,精确地控制压力、流量和位置等参数。伺服压机具有压力稳定、响应快、重复精度高等特点,适合加工精度要求高的零部件,如汽车发动机缸套、曲轴箱和铸件等。电缸则是一种基于直线电机原理的执行机构,它将电能转换成直线运动。电缸不仅可以单独使用,也可以多个联动使用以实现更复杂的动作。电缸的主要特点是结构紧凑、功率密度高、运动平稳等。电缸广泛应用于冶金、造纸、印刷、橡胶、塑料等行业的自动化生产线,如注塑机、吹塑机、印刷机械等。在控制方式上,伺服压机通常采用闭环控制回路,通过编码器、线性位移传感器等装置对实际控制量进行反制。而电缸通常采用模块化闭环伺服控制系统,完成力、位移数据的实时采集与分析,满足压装全过程品质控制和数据管理。此外,伺服压机和电缸在价格和适用范围上也有所不同。伺服压机的价格相对较高,而电缸的价格更为实惠。不过,它们在各自的应用领域都表现出了良好的性能和稳定性。综上所述,伺服压机和电缸系统在控制系统和用途上存在差异。 浙江非标电缸电缸的行程可以通过编程进行精确设定。

工业机器人中,电缸通过其机械结构和电动机系统共同实现线性运动控制。具体来说,电缸的线性运动控制过程如下:控制器:工业机器人的控制器根据编程指令和反馈信息计算出机器人所需的运动轨迹和马达控制信号,以确保机器人按照指定的轨迹和速度进行线性运动。伺服马达:伺服马达是电缸的重要驱动组件,能够将电能转化为机械能。通过控制器发出的指令,伺服马达驱动电缸进行线性运动。编码器:编码器用于反馈电机的实时位置信息,控制器根据编码器的反馈信息计算出机器人实际位置与目标位置的偏差,并调整控制信号以纠正偏差,实现闭环控制。传动机构:传动机构包括齿轮箱和滑块等部件,用于将伺服马达的转速转化为电缸所需的扭矩,并将扭矩传递到滑块上,推动滑块在导轨上做线性运动。导轨:导轨是电缸的支撑和导向部件,确保滑块沿指定轨迹进行线性运动。导轨通常由精密的钢制零件制成,以确保高精度和长寿命。滑块:滑块是电缸的执行部件,由具有低摩擦和高耐磨性的材料制成,如高分子材料和金属等。滑块与导轨的配合实现了电缸的线性运动。综上所述,工业机器人中的电缸通过其机械结构和电动机系统的协同作用,实现了精确的线性运动控制。
电缸与电机的匹配关系主要体现在以下几个方面:功率匹配:电机的功率应满足电缸的推力和速度需求。根据电缸的推力、速度和运行时间,选择合适的电机功率。如果电机功率过小,可能导致电缸无法正常运行;如果电机功率过大,则可能造成能源浪费和电机过热等问题。扭矩匹配:电机的扭矩应满足电缸的推力和运行需求。不同品牌和型号的电机扭矩不同,应根据电缸的推力需求选择合适的电机型号。同时,还需要考虑电机的转速和减速器的减速比等因素,以确保电缸能够正常运行。控制精度匹配:电机的控制精度应满足电缸的控制精度要求。如果电机的控制精度不够高,可能导致电缸的运动轨迹不准确,影响设备的性能和精度。因此,在选择电机时,应考虑其控制精度和响应速度等因素。安装尺寸匹配:在安装过程中,应确保电机和电缸法兰安装尺寸的准确性。如果尺寸不匹配,可能会导致电机与电缸无法正确连接,影响设备的正常使用。因此,在选择电机和电缸时,应考虑其安装尺寸是否匹配。综上所述,电缸与电机的匹配关系是多方面的,需要综合考虑推力、速度、控制精度和安装尺寸等因素。在选择电机时,应根据实际需求选择合适的型号和品牌,以确保电缸的正常运行和使用寿命。 电缸的响应速度快,提高了系统的动态性能。

在机器人领域,电缸的应用场景主要包括:工业机器人:电缸是工业机器人中常用的执行机构,能够实现机器人的线性运动控制。在工业生产线上,电缸驱动的机器人可以实现各种复杂的装配、搬运、焊接、涂装等任务,提高生产效率和产品质量。服务机器人:服务机器人在医疗、餐饮、家庭等场景中应用,而电缸作为服务机器人的重要执行机构,能够实现机器人的定位和运动控制。例如,在医疗领域,电缸驱动的机器人可以实现手术过程中的精细操作,提高手术成功率。特种机器人:特种机器人如水下机器人、太空机器人等,需要在特殊环境中进行高精度和高可靠性的运动控制。电缸作为特种机器人的重要执行机构,能够提供稳定可靠的动力输出,实现机器人在特殊环境中的精确操作。综上所述,电缸在机器人领域的应用场景非常广,包括工业机器人、服务机器人和特种机器人等。通过电缸的精确运动控制,可以实现机器人的各种复杂操作,提高生产效率、减少人工操作和提高生活质量。 电缸的推力和速度可以通过软件进行微调。上海电缸的工作原理动画图
电缸的运行平稳性提高了产品质量。直销电缸应用
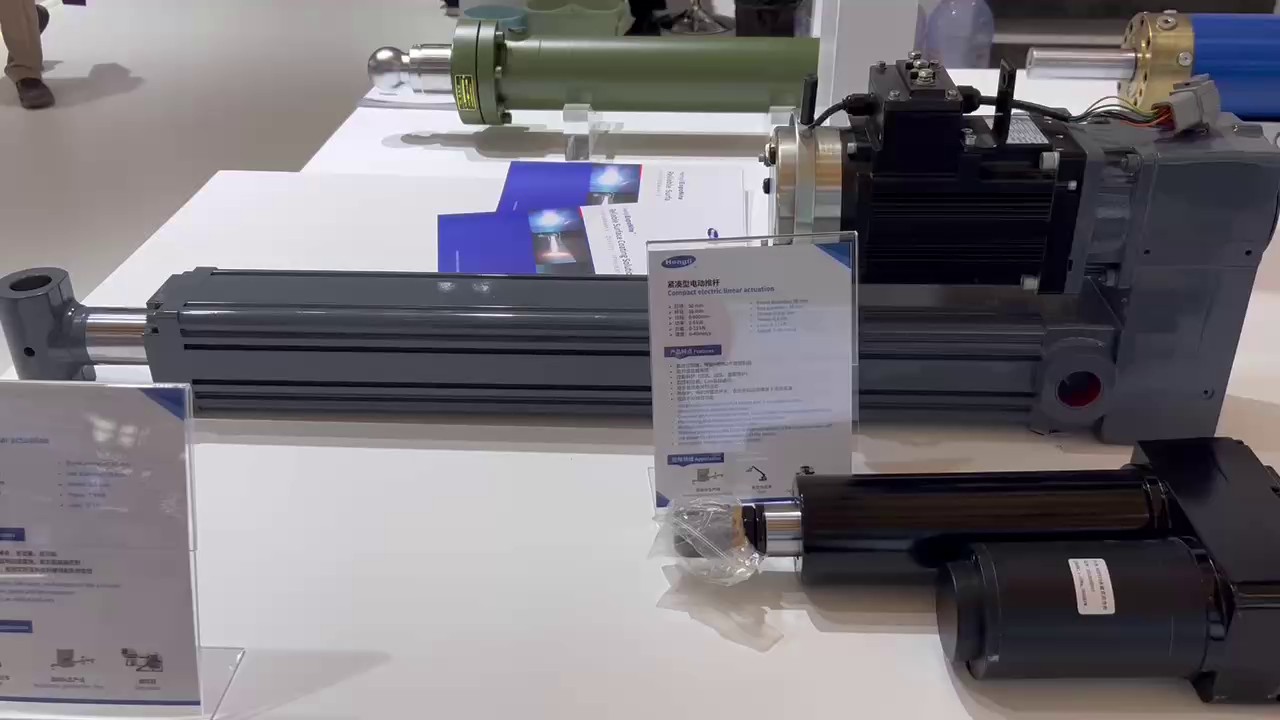
电缸的主体结构主要包括电动机、螺杆或滑块、导轨、传动装置和外壳等部分。其中,电动机是电缸的动力源,通过将电能转化为机械能来驱动螺杆或滑块进行直线运动。根据实际应用需求,可以选择合适的电动机类型和参数。螺杆或滑块是电缸的运动部件,与电动机相连,通过电动机的旋转运动实现直线运动。导轨、滑块和传动装置等部件共同组成了电缸的机械系统,用于支撑、导向和传递运动。外壳则是电缸的外部结构,起到保护和安装固定等作用。在电缸的结构中,还包括各种零部件,如轴承、联轴器、密封件、弹簧等。这些零部件对于保证电缸的性能和稳定性起着重要作用。例如,轴承可以支承电缸的旋转部件,联轴器则可以将电动机的动力传递给螺杆或滑块,密封件可以防止电缸内部的润滑油泄漏或外部灰尘进入,弹簧则可以起到缓冲和补偿的作用。总之,电缸的主体结构和各种零部件共同作用,实现了电缸的直线运动功能。根据实际应用需求,选择合适的电缸型号和参数,并进行正确的安装和维护,可以保证电缸的性能和稳定性。 直销电缸应用