电缸的优点:精度高:电缸能够准确地控制位置、速度等参数,可以实现高精度的定位和运动控制。速度快:电缸的驱动系统为电动机,其转速可以很高,因此电缸的运动速度较快。无污染:由于电缸的驱动系统为电动机,不需要润滑油,因此电缸运动时不会产生润滑油污染。易于控制:通过控制电源开关、电机控制器等电子元器件,可以实现对电缸的位置、速度等参数的精确控制。系统构成简单:由于电机通常与缸体集成在一起,再加上控制器与电缆,电缸的整个系统就是由这三部分组成的,简单而紧凑。停止的位置数多且控制精度高:低端产品的停止位置有3、5、16、64个等,产品则可以达到几百甚至上千个位置。在精度方面,电缸也具有优势,定位精度可达。柔韧性好:由于控制器可以与PLC直接进行连接,对电机的转速、定位和正反转都能够实现精确控制,在一定程度上,电缸可以根据需要随意进行运动。 电缸助力汽车生产线上的各种装配任务。非标电缸选型
电缸在制造业中有许多其他应用场景,以下是其中一些:医疗设备制造:在医疗设备制造领域,电缸被应用于手术床、手术台等医疗设备的运动控制。例如,在放射设备中,电缸用于精确控制照射位置和角度,保证准确性和安全性。半导体制造:在半导体制造中,电缸用于各种半导体设备的运动控制,如晶片加工、封装测试等。由于电缸具有高精度和高速度的特性,能够实现快速、稳定、准确的运动控制,从而提高生产效率和产品质量。航空航天制造:在航空航天制造领域,由于对设备的精度和可靠性要求极高,电缸得到了应用。例如,在飞机制造中,电缸用于控制机翼、尾翼等部件的精确装配和调整;在航天器制造中,电缸用于控制卫星的展开、调整和定位等。智能装备制造:智能装备制造领域涉及各种自动化和智能化设备,电缸作为运动控制的重要组成部分,被应用于智能机器人、智能物流装备、智能仓储设备等。通过精确控制电缸的运动轨迹和速度,可以实现高效、准确的自动化生产。综上所述,电缸在制造业的应用场景非常广包括精密加工、自动化生产线、物料输送、轴承电缸、医疗设备制造、半导体制造、航空航天制造以及智能装备制造等。这些应用场景表明。 浙江便宜的电缸电缸的运行噪音低,改善了工作环境。

工业机器人中,电缸通过其机械结构和电动机系统共同实现线性运动控制。具体来说,电缸的线性运动控制过程如下:控制器:工业机器人的控制器根据编程指令和反馈信息计算出机器人所需的运动轨迹和马达控制信号,以确保机器人按照指定的轨迹和速度进行线性运动。伺服马达:伺服马达是电缸的重要驱动组件,能够将电能转化为机械能。通过控制器发出的指令,伺服马达驱动电缸进行线性运动。编码器:编码器用于反馈电机的实时位置信息,控制器根据编码器的反馈信息计算出机器人实际位置与目标位置的偏差,并调整控制信号以纠正偏差,实现闭环控制。传动机构:传动机构包括齿轮箱和滑块等部件,用于将伺服马达的转速转化为电缸所需的扭矩,并将扭矩传递到滑块上,推动滑块在导轨上做线性运动。导轨:导轨是电缸的支撑和导向部件,确保滑块沿指定轨迹进行线性运动。导轨通常由精密的钢制零件制成,以确保高精度和长寿命。滑块:滑块是电缸的执行部件,由具有低摩擦和高耐磨性的材料制成,如高分子材料和金属等。滑块与导轨的配合实现了电缸的线性运动。综上所述,工业机器人中的电缸通过其机械结构和电动机系统的协同作用,实现了精确的线性运动控制。
电缸的输出力与电机功率之间存在直接的关系。一般来说,电机功率越大,电缸的输出力也越大。这是因为电机的功率决定了电缸的驱动力,而驱动力的大小直接决定了电缸能够产生的力的大小。在选择电缸和电机时,需要考虑实际应用场景下的负载需求。如果负载较重,需要较大的输出力,就需要选择更高功率的电机。同时,还需要考虑电机的转速和减速器的减速比等因素,以确保电缸能够满足实际应用中的推力和速度需求。需要注意的是,电机的功率并不是决定因素。电缸的输出力还受到其他因素的影响,如传动机构的设计和材料、导轨的质量和精度等。因此,在选择电缸和电机时,需要综合考虑各种因素,选择适合自己应用场景的电缸结构。电机的功率和转速之间存在一定的关系,功率和转速之间的关系可以通过电机的工作方程来描述。工作方程可以表示为:P=T*ω,其中P表示功率,T表示转矩,ω表示角速度(转速)。从这个公式可以看出,功率P与转矩T和角速度ω成正比。也就是说,当转矩T一定时,角速度ω越大,功率P也越大。因此,电机的功率和转速之间存在正比关系,转速越大,功率也越大。 电缸的模块化设计提高了系统的可扩展性。
电缸与上位机之间的调试主要涉及电缸与上位机之间的通信和控制。以下是一些常见的调试方法:确定通信协议:首先需要确定电缸与上位机之间的通信协议,包括通信端口、波特率、数据位、停止位、校验位等参数。确保协议的一致性和正确性是调试的基础。编写通信程序:在上位机上编写通信程序,使用相应的编程语言和库函数进行电缸的通信和控制。程序应该具备发送控制指令、接收电缸状态信息、实现实时控制等功能。测试通信功能:通过发送测试指令来测试电缸与上位机之间的通信功能,确保能够正确地发送控制指令和接收电缸状态信息。调整电缸参数:根据实际需求,在上位机上调整电缸的参数,如速度、加速度、位置等,以实现精确控制。监控和记录:通过上位机程序实时监控电缸的运动状态和位置,并记录相关数据。这对于后续的分析和故障排查非常重要。故障排查:当电缸运动出现异常时,可以通过上位机程序进行故障排查,检查通信协议、控制指令、电缸参数等方面是否存在问题。安全措施:在调试过程中,需要注意安全措施,确保调试过程中不会对设备和人员造成伤害。例如,在调试前进行安全检查、设置安全区域、佩戴防护装备等。 电缸提升了农业机械的自动化水平。安徽费斯托电缸
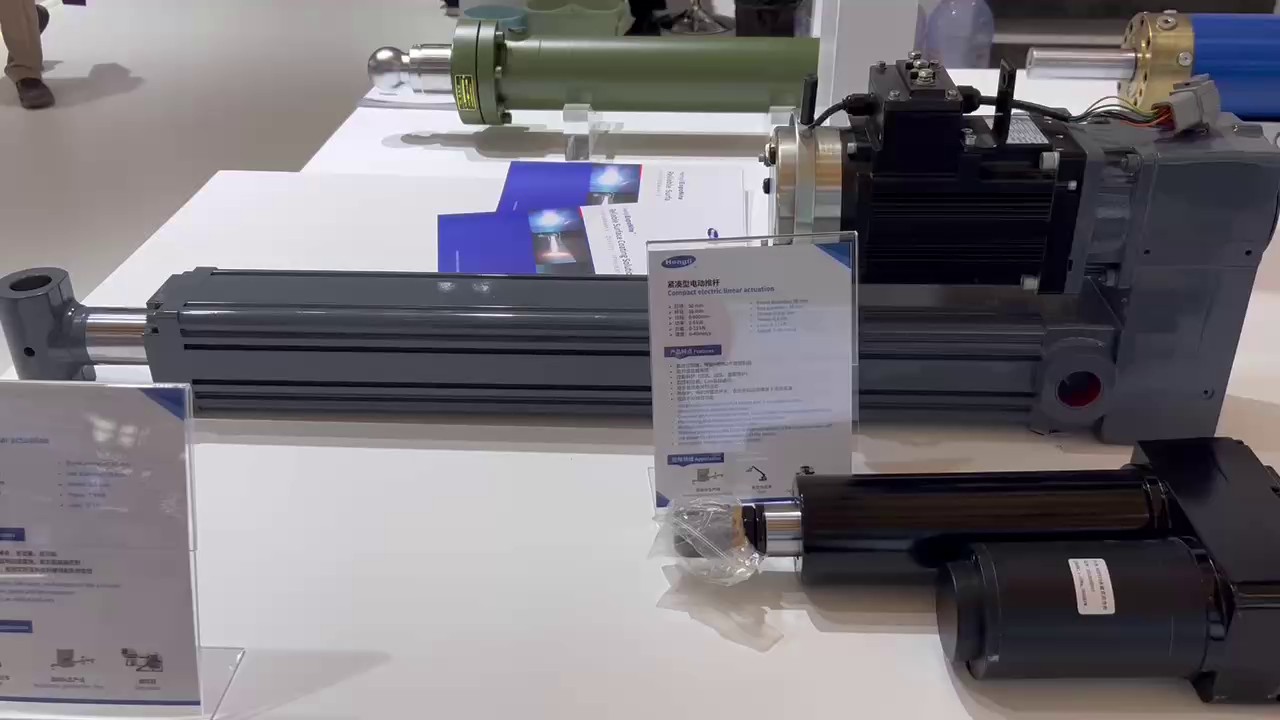
电缸在工业自动化中扮演着重要角色。非标电缸选型
电缸实时调整运动参数主要依赖于其内置的控制系统和传感器。以下是具体的实现方式:传感器反馈:电缸通常配备有多种传感器,如位置传感器、速度传感器和力传感器等。这些传感器能够实时监测电缸的运动状态和外部负载变化,并将这些信息反馈给控制系统。控制系统处理:控制系统接收到传感器的反馈信号后,会进行实时处理和分析。通过与预设的运动参数进行比较,控制系统能够计算出需要调整的参数值,以确保电缸按照预定的轨迹和要求进行运动。调整输出信号:控制系统根据计算结果,调整输出给电缸的驱动信号。这些驱动信号可以是电流、电压或脉冲信号等,用于控制电缸的电机转动,从而调整其位置、速度和加速度等运动参数。实时响应:电缸的驱动系统接收到调整后的驱动信号后,会立即作出响应,使电缸按照新的运动参数进行运动。由于控制系统的实时性和电缸的快速响应性,这种参数调整可以在非常短的时间内完成,从而实现实时调整运动参数的效果。综上所述,电缸通过传感器反馈、控制系统处理、调整输出信号和实时响应等步骤,实现运动参数的实时调整。这种能力使得电缸能够适应不同的工作场景和需求,提供精确、快速和可靠的运动控制。 非标电缸选型