在严格和敌视的环境条件下,例如温度的改动、湿润、振动等,甚至一个不良的焊接点就可以致使系统有些或全部的失控。设备中有不可胜数的焊接点,这些焊接点的可靠程度甚至应当比设备本身更高。有关这方面的研讨现已致使了材料及其性质的知识的添加,在可以的焊接工艺上取得了许多展开。焊接技术是一门伴随技术,跟着电子工业的展开,肯定不断地发生更多的有用封装技术以及更小的元器件,焊接技术也将不断地展开来满足电子工业和环境议题改动的需求。这就是为什么如今关于作业在电子工业领域的科技教授来说焊接变得越来越的缘由。焊接机焊接机的分类编辑焊接机按材料主要分为:塑料焊接机和金属焊接机两种。应用到的技术主要有:超声波、高周波、等离子、电热式、旋转式等。其中塑料焊接机用于焊接聚乙烯、聚丙乙烯、聚丙烯、尼龙等热塑性工程塑料板材或制品。作业时,塑料焊条被熔融喷出,并使被焊接工件与之融合而粘结。在塑料设备的焊接和维修、塑料地板敷设、塑料管道连接、塑料瓶封口等作业中应用相当。[2]金属焊接机主要是对金属材料进行焊接。焊接机全自动焊接机编辑太阳能电池全自动焊接机(见下图)可以按照设定要求对电池片正反面同时自动连续焊接,组成电池串。自动焊机可以提高产品的质量和竞争力。全自动焊机联系电话

降低机器人的刚度,一般适用于负载较小的机器人,用于电弧焊、切割或喷涂。平行四边形机器人其上臂是通过一根拉杆驱动的。拉杆与下臂组成一个平行四边形的两条边。故而得名。早期开发的平行四边形机器人工作空间比较小(局限于机器人的前部),难以倒挂工作。但80年代后期以来开发的新型平行四边形机器人(平行机器人),已能把工作空间扩大到机器人的顶部、背部及底部,又没有测置式机器人的刚度问题,从而得到普遍的重视。这种结构不适合于轻型也适合于重型机器人。近年来点焊用机器人(负载100~150kg)大多选用平行四边形结构形式的机器人。上述两种机器人各个轴都是作回转运动,故采用伺服电机通过摆线针轮(RV)减速器(1~3轴)及谐波减速器(1~6轴)驱动。在80年代中期以前,对于电驱动的机器人都是用直流伺服电机,而80年代后期以来,各国先后改用交流伺服电机。由于交流电机没有碳刷,动特性好,使新型机器人不**率低,而且免维修时间大为增长,加(减)速度也快。一些负载16kg以下的新的轻型机器人其工具中心点(TCP)的高运动速度可达3m/s以上,定位准确,振动小。同时,机器人的控制柜也改用32位的微机和新的算法,使之具有自行优化路径的功能。衢州仓储横梁自动焊机自动焊机可以实现焊接过程的快速调整。

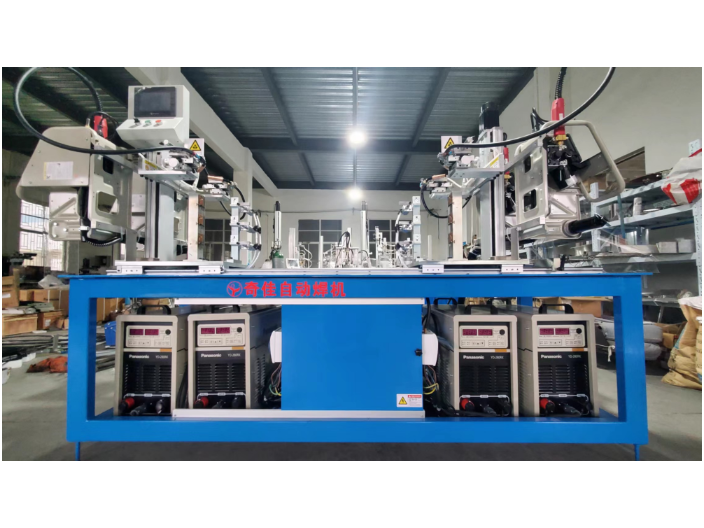
对焊接工艺及参数控制要求较高(我司在这方面有自己的特长),对于1mm以下的极薄板焊接,用微束等离子较易进行焊接。(4)熔化极气体保护焊这种焊接方法是利用连续送进的焊丝与工件之间燃烧的电弧作热源,由焊炬喷嘴喷出的气体来保护电弧进行焊接的.熔化极气体通常用的气体有氩气,氦气,co2,氧气或这些气体的混合气。以氩气和氦气作为保护气体时简称为MIG焊,活性气体(co2、氧)或活性气体与惰性气混合气作保护气时简称为MAG焊熔化极气体保护焊的主要优点是可以方面地进行种位置的焊接,同时具有焊接速度较快,熔敷率较高等优点。(5)药芯丝电弧焊药芯丝电弧焊是利用连续送进的焊丝与工件之间燃烧的电弧作热源来进行焊接,可以认为是熔化极气体保护焊的一种,所以使用的焊丝是药芯焊丝,焊丝的芯部有不同组成部份的药粉,焊接时外加保护气体,药粉受热分解或熔化,起着造气、造渣保护熔池,渗合金及稳弧作用.(6)电阻焊是以电阻热为能源的一种焊接方法,包括以熔渣电阻热为能源的电渣焊和以固体电阻热为能源的电阻焊,以固体电阻热为能源的电阻焊,主要定位焊,缝焊、凸焊及对焊等。
全位置管道自动焊产品介绍:管道全位置自动焊机是管道环缝焊接的设备,特别适用于野外环境下Φ130mm以上的各种不同管径的焊接。管道全位置自动焊机的基本特点是:整个焊接过程是一个从平焊状态到立焊状态再到仰焊状态的平滑过度过程,焊接小车各部机构的运动控制必须满足上述的基本要求。因此,管道全位置自动焊机的焊接速度,送丝速度,摆动宽度,摆动速度,焊接电压和焊接电流都要随着状态的变化而变化。圆周各点参数均由计算机程序自动控制完成,实现焊接工艺参数的连续变化。自动焊机可以实现焊接过程的自动化检测和报警。

否则应尽量选用6轴机器人。弧焊机器人除前面图2提及的在作“之”字形拐角焊或小直径圆焊缝焊接时,其轨迹应能贴近示教的轨迹之外,还应具备不同摆动样式的软件功能,供编程时选用,以便作摆动焊,而且摆动在每一周期中的停顿点处,机器人也应自动停止向前运动,以满足工艺要求。此外,还应有接触寻位、自动寻找焊缝起点位置、电弧**及自动再引弧功能等。焊接机器人焊接设备弧焊机器人多采用气体保护焊方法(MAG、MIG、TIG),通常的晶闸管式、逆变式、波形控制式、脉冲或非脉冲式等的焊接电源都可以装到机器人上作电弧焊。由于机器人控制柜采用数字控制,而焊接电源多为模拟控制,所以需要在焊接电源与控制柜之间加一个接口。近年来,国外机器人生产厂都有自己特定的配套焊接设备,这些焊接设备内已经播人相应的接口板、所以在图1a中的弧焊机器人系统中并没有附加接口箱。应该指出,在弧焊机器人工作周期中电弧时间所占的比例较大,因此在选择焊接电源时,一般应按持续率100%来确定电源的容量。送丝机构可以装在机器人的上臂上,也可以放在机器人之外,前者焊到送丝机之间的软管较短,有利于保持送丝的稳定性,而后者软管校长,当机器人把焊送到某些位置。自动焊机的焊接方式可以根据焊接环境和安全要求进行选择和调整。衢州仓储横梁自动焊机
自动焊机可以实现高精度的焊接,可以满足各种复杂焊接要求。全自动焊机联系电话
焊枪位于送丝杆的一侧,固定架上设有转动件,转动件上固定连接有送丝调节件,送丝杆设于送丝调节件上。本实用新型通过在固定架上安装转动件,在转动件上固定连接送丝调节件,将送丝杆安装到送丝调节件上,焊枪位于送丝杆的一侧,转动件的转动带动送丝调节件与送丝杆一起转动,从而可以调节送丝杆的角度,送丝调节件可以对送丝杆进行前后、左右的调节,提高了送丝杆与焊枪的匹配度,从而增加了焊接效率、焊接准确性与焊接成型一致性。进一步,固定架上固定连接有安装座,转动件设于安装座上,转动件的端部固定连接有安装板,送丝调节件设于安装板的顶部。实现了通过转动件的转动带动安装板、送丝调节件与送丝杆的转动,从而调节送丝杆的角度,送丝调节件在安装板上调节送丝杆的前后、左右的位置,从而提高了送丝杆与焊枪的匹配度。进一步,转动件包括转轴与转动块,转轴的一端设于安装座上,转轴的另一端与转动块转动连接,转动块的顶部与安装板固定连接。通过转轴的转动带动转动块的转动,转动块带动安装板的转动,从而使得送丝杆的角度的具有可调节性。进一步,送丝调节件包括送丝气缸、调节架与送丝导轨,送丝导轨固定连接在安装板的顶部。全自动焊机联系电话