- 品牌
- 微纳光科
- 型号
- 机械臂
全自动机械臂的缺点:高成本:全自动机械臂的购买、安装和维护成本较高,对于一些中小型企业来说可能难以承担。技术要求高:全自动机械臂的操作和维护需要专业技术人员进行,对人员的技术要求较高。适用范围受限:全自动机械臂在某些特定的工作场景下效果更好,对于复杂、多变的任务可能不太适用。安全风险:全自动机械臂在工作过程中可能存在安全隐患,需要严格的安全措施和监控。灵活性不足:全自动机械臂的编程和调整需要一定的时间和成本,不如人类操作灵活。维护困难:全自动机械臂的维护和保养需要专业技术人员进行,一旦出现故障可能影响生产进度。环境适应性差:全自动机械臂对工作环境的要求较高,对于一些特殊环境可能不太适用。替代人力:全自动机械臂的广泛应用可能导致部分人员失业,对社会造成一定影响。智能机械臂的学习能力和适应能力不断提升。光学测距仪报价
工业机械臂的应用领域汽车制造:工业机械臂在汽车制造中应用,可以完成焊接、喷涂、装配等工序,提高生产效率和产品质量。电子制造:工业机械臂可以完成电子产品的组装、测试、包装等工序,提高生产效率和产品一致性。物流仓储:工业机械臂可以实现物料的搬运、堆垛、分拣等任务,提高物流效率和减少人工成本。食品加工:工业机械臂可以完成食品的分拣、包装、烹饪等工序,提高生产效率和产品卫生安全。医疗领域:工业机械臂在医疗领域的应用越来越广,可以完成手术辅助、药物配送等任务,提高手术精度和效率。装车卸车机械臂制造半封闭机械手的优点和缺点是什么?
半封闭机械手的工作流程通常包括以下几个步骤:接收任务:控制系统接收任务指令,包括需要完成的动作、目标位置等信息。感知环境:机械手通过传感器感知周围环境,获取物体的位置、形状、重量等信息。规划路径:控制系统根据任务要求和环境信息,规划机械手的运动路径和动作序列。执行动作:机械手根据控制系统的指令,通过驱动装置实现各个关节的运动,完成所需的动作。反馈调整:机械手通过传感器反馈信息给控制系统,实时调整动作,确保完成任务的准确性和稳定性。
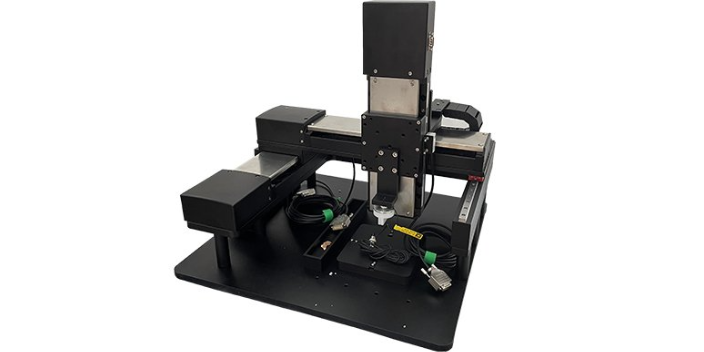
机械臂:工业机械臂的优势在于其高度灵活性和可编程性。通过调整机械臂的关节角度和运动轨迹,可以适应不同的工作场景和任务需求。同时,工业机械臂可以通过编程实现自动化操作,提高生产效率和产品质量,减少人力成本和人为错误。在制造业中,工业机械臂广泛应用于装配线、焊接线、喷涂线等生产线上。它可以完成零部件的搬运和装配,提高生产效率和一致性。同时,工业机械臂还可以进行复杂的焊接和喷涂操作,提高产品质量和外观。半封闭机械手的控制系统通常采用先进的技术。
半封闭机械手的工作原理主要包括以下几个步骤:接收指令:通过控制系统接收用户输入的指令,确定机械手的工作任务和路径。运动规划:根据任务要求和环境条件,规划机械手的运动轨迹和动作序列。运动控制:通过控制系统控制机械手的各个关节和执行器,实现精细的运动控制。任务执行:机械手按照规划好的路径和动作序列执行工作任务,完成指定的操作。反馈监控:通过传感器实时监测机械手的运动状态和周围环境,及时调整控制参数,确保机械手的安全和精细度。 全自动机械臂的优势有哪些?机械手应用领域的创新解决方案
全自动机械臂的设计结构经过精心优化,具有高度稳定性。光学测距仪报价
控制系统半封闭机械手的控制系统是整个机器人的大脑,负责指挥机械手的运动和动作。控制系统通常由计算机、控制器、编码器等组件组成,通过预先设定的程序和算法来控制机械手的运动轨迹、速度和力度。控制系统还可以接收传感器反馈的信息,实时调整机械手的动作,以适应不同的工作场景和任务需求。
半封闭机械手的工作原理是通过机械结构、传感器和控制系统的协同作用,实现对物体的抓取、搬运、加工等操作。机械手可以根据预先设定的程序和算法,灵活地适应不同的工作场景和任务需求,提高生产效率和产品质量。 光学测距仪报价
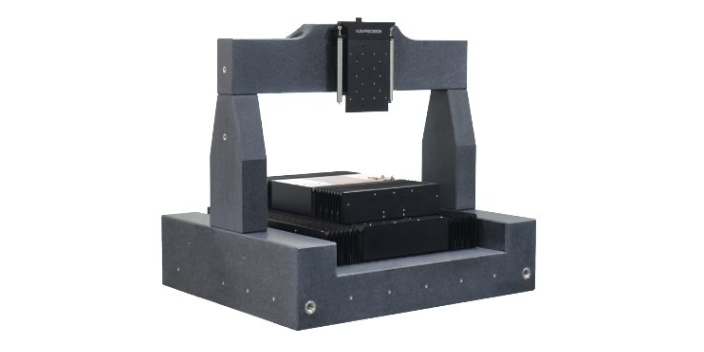
半封闭机械手是一种常见的工业机器人,其工作原理涉及多个方面,包括机械结构、传感器、控制系统等。以下是关于半封闭机械手工作原理的详细解释,希望对您有所帮助。机械结构半封闭机械手通常由多个关节组成,每个关节都有自己的运动范围和自由度。这些关节通过电机、减速器和传动装置等组件驱动,实现机械手的运动。机械手的末端通常安装有夹具或工具,用于抓取、搬运或加工物体。传感器半封闭机械手通常配备各种传感器,用于感知周围环境和监测机械手的状态。常见的传感器包括位置传感器、力传感器、视觉传感器等。这些传感器可以提供机械手所需的信息,如物体的位置、力度、形状等,从而帮助机械手做出相应的动作和调整。 全自动机械臂未...
- 音圈电机组合台报价 2024-05-19
- 自动化机械臂制造 2024-05-19
- 洁净式机械手的操作技巧 2024-05-19
- 机械臂销售 2024-05-19
- 工业机械手 2024-05-19
- 皮带驱动滑台的电机控制 2024-05-19
- 半封闭机械手的编程工具 2024-05-19
- 轻载型开环串联六轴哪家专业 2024-05-19
- 变距滑台的高速定位 2024-05-19
- 装车机械臂生产厂家 2024-05-19

- 光学测距仪报价 2024-05-18
- 螺杆驱动滑台 2024-05-18
- 机械手连接器的接口规格 2024-05-18
- 三轴龙门滑台的耐用性评估 2024-05-18
- 电缸报价 2024-05-18
- 机械手哪家好 2024-05-17