机器人打磨改善了工人的劳动条件。在一些有害环境下,如高温、高湿、粉尘等,工人长时间工作可能会对身体造成危害。而机器人可以在这些恶劣环境下长期工作,有效保护工人的健康和安全。机器人打磨降低了对工人操作技术的要求。传统的打磨工作需要工人具备较高的技能水平和经验,而机器人打磨则可以通过预设的程序和参数来实现高精度的打磨作业,无需工人具备专业的技能。这降低了对工人操作技术的要求,使得更多的工人可以参与到这一工作中来。机器设计紧凑,占地面积小,节省车间空间。宁波机器人铸件打磨
企业还可以考虑将工件交由机器人解决方案提供商进行代加工。这种方式允许企业在有限的预算内,实现更高的生产效能。通过代加工,企业可以充分利用提供商的专业技术和设备,降低自身的生产成本,同时提高产品质量和生产效率。在选择合适的打磨抛光工业机器人制造公司时,企业应全方面考虑预算、完成率和节拍等因素,以确保选择到适合自己的机器人解决方案。通过合理的预算分配和与提供商的紧密合作,企业可以实现生产效能的较大化,推动业务持续发展。扬州打磨机械手适用于航空航天、汽车、电子等行业的金属件抛光。

在传统的制造业中,卫浴制造尤为关键,其中抛光打磨工序是不可或缺的一环。然而,这一环节的成本却占据了总成本的三成,这无疑增加了企业的运营压力。随着劳动力成本的逐年上升,以及人工打磨过程中产生的粉尘对工人健康的潜在威胁,卫浴制造行业的招工问题变得愈发严峻。为了解决这一难题,许多卫浴制造厂开始寻求技术升级,用智能打磨设备来替代传统的人工打磨。抛光打磨机器人的引入,不仅能在一年半的时间内回收机器成本,还能明显提升产品质量。由于机器人的精确控制,产品表面的抛光打磨效果更加均匀,颜色更加一致。生产效率也得到了大幅度提升。抛光打磨机器人作为现代工业机器人的重要分支,专门用于替代人工进行工件的打磨抛光工作。
打磨机械手通过其精确的力控制和适应性强的特点,成功解决了传统打磨过程中存在的问题,为制造行业带来了更高的生产效率、更好的产品和更低的成本。在未来,随着技术的不断进步,打磨机械手有望在更多领域发挥更大的作用。在去除毛刺的打磨加工过程中,影响毛刺打磨效果的因素繁多且关键。这其中,刀具、主轴转速、切屑速度以及机器人的运动轨迹都是不可忽视的要素。尤其是机器人的运动轨迹,它直接决定了加工过程中的运动路径。尽管我们深知机器人在重复定位方面的精度极高,但在编程阶段,机器人的点位通常依赖于示教过程。示教过程需要人工进行位置确认,这就不可避免地引入了人为误差,使得点位存在偏差。这种偏差会直接影响到切屑效果,造成加工后的表面质量不均匀。机器具备自动调整磨头压力功能,确保抛光效果。

点位操控(PTP)是一种只关注打磨机器人末端执行器在作业空间中特定离散点位置和姿态的操控方式。在操作过程中,只要求打磨机器人能迅速、准确地在相邻各点之间移动,而对达到目标点的移动路径并无特定要求。这种操控方式的两个主要技术指标是定位精度和运动时间。由于其实现相对简单,且对定位精度的要求相对较低,因此,点位操控常常被用于如上下料、转移、点焊以及在电路板上安装元件等只需要在目标点保持末端执行器精确位置和姿态的任务中。尽管这种操控方式相对简单,但要实现2~3um的高定位精度却是一项极具挑战性的任务。适用于大尺寸金属件的抛光,如金属板、型材等。小型打磨机规格
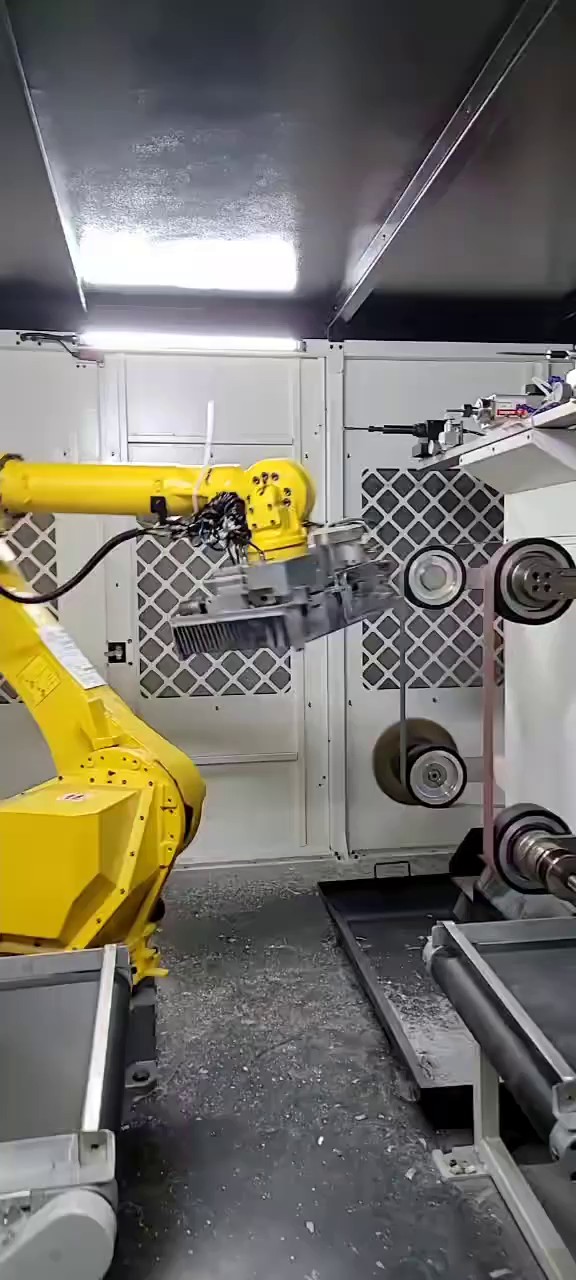
可实现镜面抛光效果,提升产品档次。宁波机器人铸件打磨
传统的工业机器人通过其高效且精确的位置控制,遵循着控制系统为其设定的路径,在空间中进行精确的移动,进而出色地完成如搬运、检测、喷涂、上下料等一系列作业。然而,随着工业自动化步伐的加快,机器人正逐渐扩展其应用领域,涉足更普遍的工业环境。在这种背景下,单纯的位置控制已逐渐显示出其局限性,特别是在那些需要机器人与环境进行交互作用的应用场景中。在工业制造领域,随着产品工艺标准的不断提高,许多新的制造工艺已无法通过传统工业机器人的位置控制来完美实现。例如,对于精密零部件的柔性装配,或者一致性较差的复杂曲面打磨等任务,传统的位置控制方法可能因工件的一致性问题导致位置误差,从而引发系统瞬间的过载,这不仅可能损坏工件,还可能对机器人本身造成损害。因此,为了满足这些更复杂的工艺需求,我们必须对传统工业机器人的控制方式进行创新和改进。宁波机器人铸件打磨