- 品牌
- Psylotech
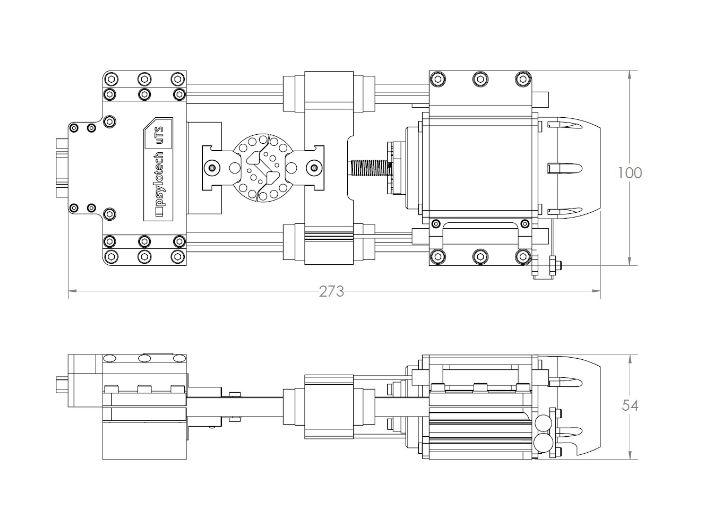
- 型号
- μTS,xTS
原位加载系统的控制方式:远程控制是一种通过网络或者无线通信技术,实现对设备的远程监控和操作的方式。在原位加载系统中,远程控制通常是通过计算机或者移动设备来实现的。操作人员可以通过远程控制软件,实时监控设备的运行状态,并进行远程操作,例如启动、停止、调整参数等。远程控制方式可以实现对设备的远程管理,提高工作效率和灵活性,但需要保证网络或者通信的稳定性和安全性。不同的控制方式适用于不同的场景和需求,可以根据实际情况选择合适的控制方式,以实现设备的高效运行和管理。原位加载扫描电镜技术逐渐成为材料性能研究中的一种重要技术。山东扫描电镜原位加载系统
原位加载系统与传统加载系统有何区别?随着科技的不断发展,计算机系统也在不断升级和改进。原位加载系统和传统加载系统是计算机系统中两种不同的加载方式。它们在加载速度、资源利用和用户体验等方面存在着明显的区别。首先,原位加载系统是一种新型的加载方式,它的主要特点是将软件和数据直接加载到计算机的内存中,而不需要像传统加载系统那样需要将软件和数据从硬盘中读取到内存中。这样做的好处是可以很大程度提高加载速度,减少了硬盘读取的时间,使得用户可以更快地使用计算机系统。而传统加载系统需要将软件和数据从硬盘中读取到内存中,这个过程需要一定的时间,会导致用户等待的时间增加。其次,原位加载系统可以更好地利用计算机的资源。由于软件和数据直接加载到内存中,可以减少硬盘的读写操作,降低了对硬盘的使用频率,延长了硬盘的使用寿命。河南Psylotech原位加载设备哪家好原位加载系统通过真实模拟材料受力状态,提供更准确的性能评估。
原位加载系统的工作原理可以分为以下几个步骤:1.初始化操作系统:一旦操作系统的中心组件加载完成,原位加载系统会执行一系列的初始化操作,以确保操作系统能够正常运行。这些操作包括设置系统的初始配置、加载和初始化系统服务和进程、建立系统的运行环境等。2.加载应用程序:在操作系统初始化完成后,原位加载系统会继续从内部存储器中加载和运行应用程序。这些应用程序可以是预装在设备中的默认应用,也可以是用户自行安装的第三方应用。加载应用程序的过程与加载操作系统类似,都是通过读取存储器中的二进制代码,并将其复制到设备的内存中进行解析和执行。
原位加载系统的标定和校准方法:静态标定是指在静止状态下进行的标定。首先,将待测物体放置在已知参考位置上,并记录传感器输出值。然后,将物体移动到其他已知位置,并再次记录传感器输出值。通过对比传感器输出值和实际位移值,可以建立传感器输出与实际位移之间的关系。静态标定通常需要进行多次测量,以提高标定的准确性。动态标定是指在运动状态下进行的标定。与静态标定不同,动态标定需要考虑物体的运动特性。通常,需要在物体上施加已知的力或载荷,并记录传感器输出值和物体的位移值。通过分析传感器输出和物体的位移之间的关系,可以建立传感器的标定模型。动态标定通常需要使用高速数据采集设备和精确的运动控制系统。原位加载系统的工作原理包括解析、编译和执行三个主要步骤。

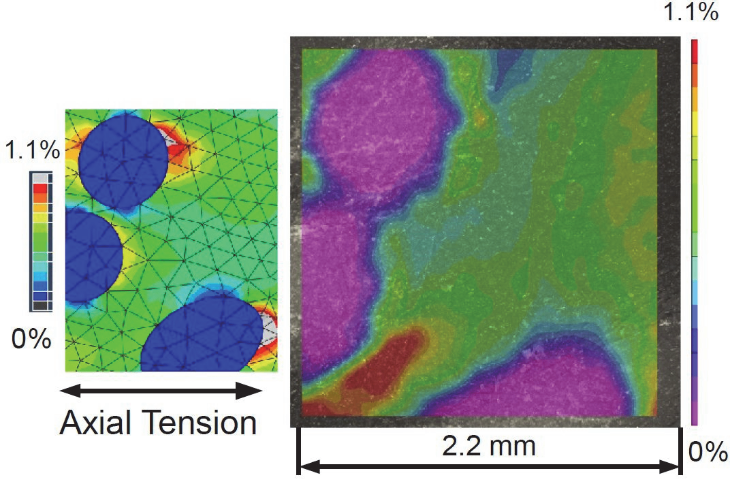
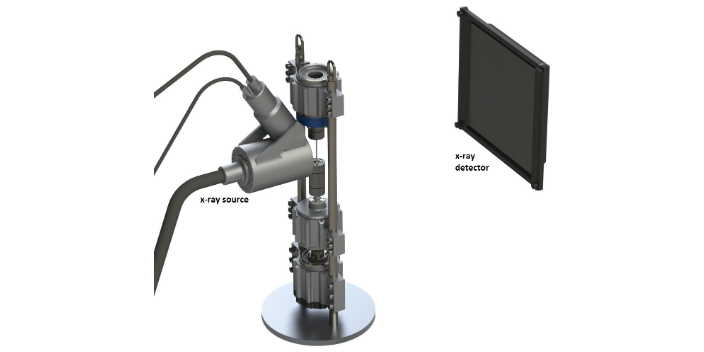
原位加载系统是一种用于测量材料力学性能的重要工具。它通过在材料上施加力或应力,并测量相应的变形或应变来评估材料的力学性能。原位加载系统可以测量许多力学性能,包括弹性模量、屈服强度、断裂韧性等。这里将详细介绍原位加载系统可以测量的几种力学性能。首先,原位加载系统可以测量材料的弹性模量。弹性模量是材料在受力时恢复原状的能力。通过在材料上施加不同的力或应力,并测量相应的应变,可以计算出材料的弹性模量。这对于评估材料的刚性和变形能力非常重要,尤其在工程领域中,弹性模量是设计结构和材料选择的重要参数。其次,原位加载系统可以测量材料的屈服强度。屈服强度是材料在受力时开始发生塑性变形的临界点。通过逐渐增加施加在材料上的力或应力,并观察材料的变形情况,可以确定材料的屈服强度。屈服强度是评估材料抗变形和抗破坏能力的重要指标,对于工程结构的设计和材料的选择具有重要意义。利用X射线断层照相设备对损伤前后的样品进行非原位测试没有问题。北京显微镜原位加载试验机哪家好
原位加载系统负责加载和运行预装的默认应用和用户安装的第三方应用。山东扫描电镜原位加载系统
原位加载系统可以研究材料的微观结构和变形机制。材料的力学性能和塑性加工过程与其微观结构和变形机制密切相关。通过原位加载系统,可以观察材料在加载过程中的微观结构变化,如晶粒的形变、位错的运动等。这有助于揭示材料的变形机制,进一步理解材料的塑性行为。例如,通过原位加载系统的应用,科学家们发现了一些新的变形机制,如孪晶形变、位错滑移等,这对于材料的塑性加工和性能改进具有重要意义。此外,原位加载系统还可以研究材料的塑性加工过程。塑性加工是一种常用的材料加工方法,通过施加外力使材料发生塑性变形,从而得到所需的形状和性能。山东扫描电镜原位加载系统
- 西安Psylotech原位加载设备哪家好 2026-02-14
- 浙江Psylotech系统哪里有卖 2026-02-14
- 贵州xTS原位加载试验机哪里有 2026-02-13
- 青海uTS原位加载系统哪里有 2026-02-13
- 广东Psylotech原位加载试验机价格 2026-02-13
- 湖南SEM原位加载系统哪里能买到 2026-02-13
- 上海CT原位加载设备销售商 2026-02-12
- 山东CT原位加载试验机销售公司 2026-02-12
- 云南原位加载试验机哪里有 2026-02-12
- 重庆扫描电镜原位加载试验机哪家好 2026-02-12
- 四川CT原位加载设备总代理 2026-02-12
- 重庆SEM原位加载系统哪家好 2026-02-12