- 品牌
- OP on CSS
- 型号
- CHR-900-N4
- 类型
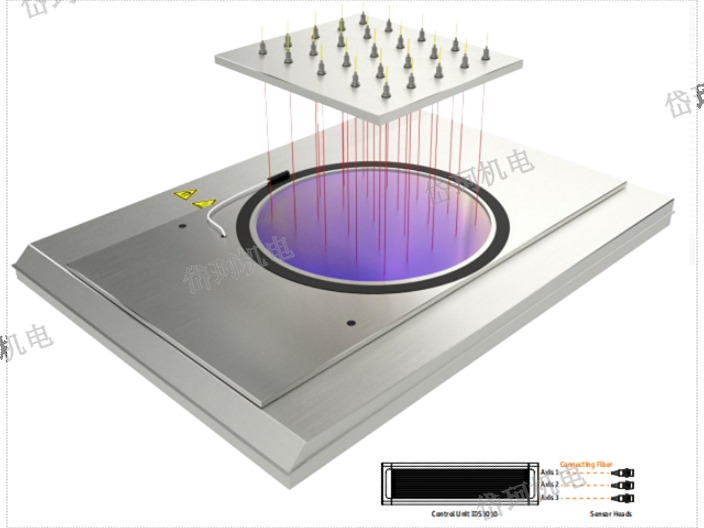
- 轴向
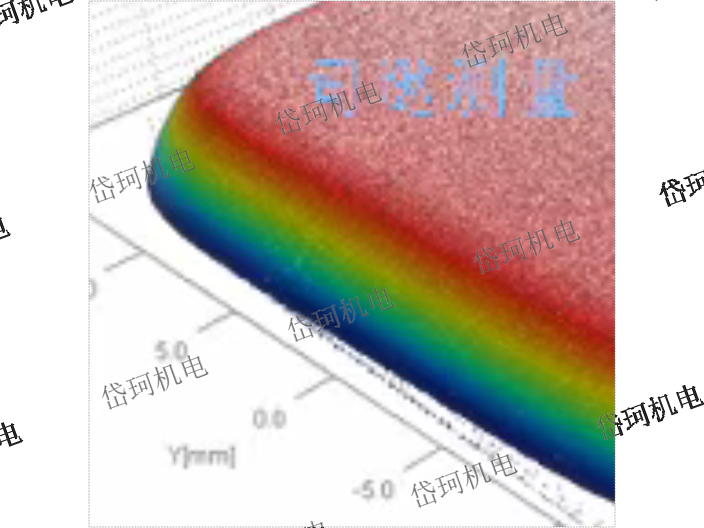
平面度:
形位误差中的形状误差。
平面度是指基片具有的宏观凹凸高度相对理想平面的偏差。公差带是距离为公差值t的两平行平面之间的区域。平面度属于形位误差中的形状误差。
平面度测量是指被测实际表面对其理想平面的变动量。平面度误差是将被测实际表面与理想平面进行比较,两者之间的线值距离即为平面 度误差值;或通过测量实际表面上若干点的相对高度差,再换算以线值表示的平面度误差值。
平面度误差测量的常用方法有如下几种:平晶干涉法、打表测量法、液平面法、光束平面法、激光平面度测量仪、利用数据采集仪连接百分表测量平面度误差的方法。 不应该把遭遇问题的迫切情绪,或者感性因素导入到解决方案中,这样可能适得其反。智能解决方案认真负责
解决方案
应用要点(1)应根据被测工件的具体特点及建模要求合理选用适当的扫描测量方式,以达到提高数据采集精度和测量效率的目的。(2)为便于测量草作和测头移动,应合理规划被测工件装夹位置;为保证造型精度,装夹工件时应尽量使测头能一次完成全部被测对象的扫描测量。(3)扫描测量点的选取应包括工件轮廓几何信息的关键点,在曲率变化较明显的部位应适当增加测量点。有CAD模型如被测工件有CAD模型,开始扫描时用鼠标左键点击CAD模型的相应表面,PCDMIS程序将在CAD模型上生成一点并加标志“1”表示为扫描起始点;然后点击下一点定义扫描方向;结尾点击终点(或边界点)并标志为“2”。在“1”和“2”之间连线。对于每一所选点,PCDMIS已在对话框中输入相应坐标值及矢量。确定步长及其它选项(如安全平面、单点等)后,点击“测量”,然后点击“创建”。智能化解决方案定义在实际操作中,解决方案涉及到创意的要素不多,更多的是从已经存在的成功案例中寻找。
测量方法平面度误差测量的常用方法有如下几种:1、平晶干涉法:用光学平晶的工作面体现理想平面,直接以干涉条纹的弯曲程度确定被测表面的平面度误差值。主要用于测量小平面,如量规的工作面和千分尺测头测量面的平面度误差。平面是由直线组成的,因此直线度测量中直尺法、光学准直法、光学自准直法、重力法等也适用于测量平面度误差。测量平面度时,先测出若干截面的直线度,再把各测点的量值按平面度公差带定义(见形位公差)利用图解法或计算法进行数据处理即可得出平面度误差。也有利用光波干涉法和平板涂色法测量平面误差的。
光传感器通常是指能敏感由紫外光到红外光的光能量,并将光能量转换成电信号的器件。光传感器是一种传感装置,主要由光敏元件组成,主要分为环境光传感器、红外光传感器、太阳光传感器、紫外光传感器四类,主要应用在改变车身电子应用和智能照明系统等领域。现代电测技术日趋成熟,由于具有精度高、便于微机相连实现自动实时处理等优点,已经广泛应用在电气量和非电气量的测量中。然而电测法容易受到干扰,在交流测量时,频率响应不够宽及对耐压、绝缘方面有一定要求,在激光技术迅速发展的当今,已经能够解决上述的问题。一个可以不断自我完善的解决方案,才能真正改善状况,使得它以更高的效率执行。
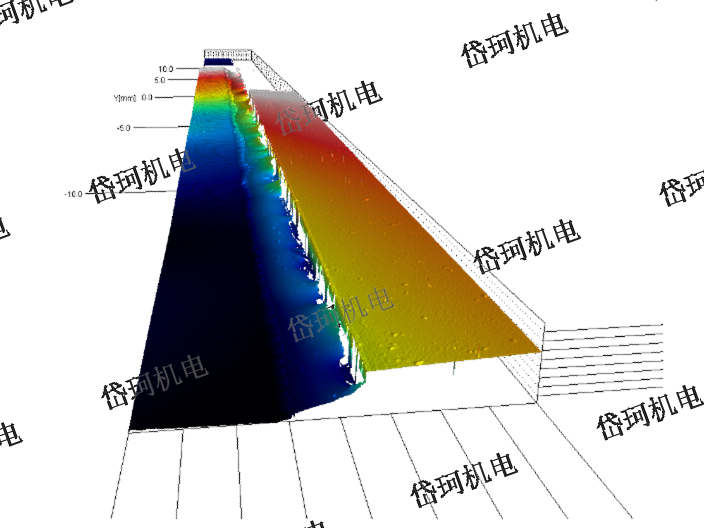
平面度:形位误差中的形状误差。平面度是指基片具有的宏观凹凸高度相对理想平面的偏差。公差带是距离为公差值t的两平行平面之间的区域。平面度属于形位误差中的形状误差。平面度测量是指被测实际表面对其理想平面的变动量。平面度误差是将被测实际表面与理想平面进行比较,两者之间的线值距离即为平面度误差值;或通过测量实际表面上若干点的相对高度差,再换算以线值表示的平面度误差值。平面度误差测量的常用方法有如下几种:平晶干涉法、打表测量法、液平面法、光束平面法、激光平面度测量仪、利用数据采集仪连接百分表测量平面度误差的方法。从某种程度来说,解决方案执行是相互交互影响,执行的效果应该及时反馈,并对原方案做出修正性参考和建议。上海现代解决方案
问题为什么会发生,是否还会再次产生,这种问题是否会导致其它的问题。智能解决方案认真负责
系统管理解决方案IT部门现在比以往任何时候都更需要实现事半功倍的效果。借助系统管理工具和解决方案,来帮助实现平衡并从中受益。戴尔解决方案可帮助IT组织提高企业的工作效率,同时简化并自动执行在管理和维护IT资产中所需的较耗时的任务。一系列系统管理工具具备独特的基于标准的设计和易用性,可提供包含多个系统的单一视图,能够实现一对多的控制和自动执行日常管理任务。解决方案不局限于解决本次问题,它应该避免相关问题的出现,警示相关的人员,并且能够做到经验的传承积累。智能解决方案认真负责
- 智能化解决方案应用范围 2024-06-03
- 优势解决方案扣件 2024-06-03
- 新型解决方案价格行情 2024-06-02
- 现代解决方案信息推荐 2024-05-25
- 解决方案规格尺寸 2024-05-11
- 特殊解决方案备件 2024-05-11
- 名优解决方案按需定制 2024-05-11
- 光电解决方案注意事项 2024-05-11
- 厚膜电路/厚膜电阻测量 2024-02-18
- 福建光电解决方案 2024-02-18
- 名优解决方案备件 2024-02-18
- 名优解决方案扣件 2024-02-18