三维扫描仪的精度与其扫描出来的物体的大小并没有直接的关系。精度主要指的是扫描结果与实际物体之间的吻合程度,即扫描数据的准确性和细节捕捉能力。而扫描出来的物体的大小则取决于扫描物体本身的尺寸以及扫描时的设置和参数。高精度的三维扫描仪能够更准确地捕捉物体的形状、细节和表面特征,生成更精确的三维数据。这意味着扫描结果更接近于实际物体的真实形态,能够呈现出更多的细节和微小的变化。然而,这并不意味着扫描出来的物体会变得更大。无论扫描仪的精度如何,它都只是在记录物体的三维信息,而不会改变物体本身的大小。扫描物体的大小取决于物体本身的尺寸以及扫描时的设置。例如,如果扫描一个较小的物体,无论使用高精度还是低精度的扫描仪,扫描结果都会是一个较小的三维模型。同样地,如果扫描一个较大的物体,扫描结果将是一个较大的三维模型。因此,三维扫描仪的精度与扫描出来的物体的大小是两个不同的概念。选择适当的扫描仪和设置,可以根据需要获得精确且与实际物体尺寸相匹配的三维模型。通过三维扫描仪获取的数字模型,可以方便地进行编辑、修改和优化。便携式三维扫描仪一体化

三维扫描技术的兼容性研究是一个涉及多个方面的综合性课题,主要关注于三维扫描设备与其他系统、软件以及应用场景的协同工作能力。以下是对三维扫描技术兼容性研究的深入探讨:首先,从硬件兼容性来看,三维扫描技术需要与各种类型的设备进行良好的协同工作。这包括但不限于与相机、测量设备、无人机等外设的连接和数据交互。为了实现这些设备的无缝集成,三维扫描设备通常具备标准的接口和协议,以确保数据的准确传输和共享。此外,随着物联网技术的发展,三维扫描设备还需要与物联网平台进行连接,实现数据的远程传输和实时监控。其次,软件兼容性也是三维扫描技术兼容性研究的重要方面。三维扫描设备生成的数据通常以特定的格式存储,因此,需要开发能够兼容这些数据格式的软件工具。这些软件工具不仅能够读取和处理三维扫描数据,还能将其与其他类型的数据进行集成和比较。此外,随着云计算和大数据技术的发展,三维扫描数据也需要与云服务平台进行对接,实现数据的云端存储、分析和共享。吉林三维扫描仪型号三维扫描仪的操作简便,使得非专业人员也能轻松完成复杂物体的扫描工作。
三维扫描仪在模具制造与修复:在汽车制造过程中,模具是关键的生产工具。三维扫描技术可以用于检测模具的磨损和变形情况,为模具的修复和替换提供精确的数据支持。虚拟装配与仿真:结合三维扫描数据和虚拟现实技术,可以实现汽车的虚拟装配和仿真。这有助于提前发现和解决装配过程中可能出现的问题,提高装配效率和质量。自动化生产线集成:三维扫描技术可以与自动化生产线进行集成,实现自动化检测和质量控制。通过实时获取生产线上零部件的三维数据,可以监控生产过程的稳定性和一致性。综上所述,三维扫描技术在汽车制造领域的应用具有宽广的前景和潜力。随着技术的不断进步和应用场景的不断拓展,三维扫描技术将为汽车制造业带来更多的创新和价值。然而,在实际应用中,还需要注意解决一些技术挑战,如精度控制、数据处理速度以及与其他系统的集成等问题。
设备准备与安装:打开保护箱,检查电池、电池架、电缆、充电器等附件是否齐全。连接电池架、电池、激光扫描仪,确保连接牢固可靠。将激光扫描仪固定在三脚架上,并对准扫描目标。确保三脚架架设稳固,无需平衡调整。插入存储U盘,打开电源,进行扫描仪自检和优化。设备校准:根据设备类型,执行相应的校准命令,如C-Track校准和扫描头校准,确保设备精度。连接与设置:连接控制设备(如计算机或PDA)与扫描仪,并进入操作系统。在操作系统中,设置存储文件名及其路径。扫描操作:获取目标图像,选定扫描区域。根据扫描目标的特点,计算目标平均距离,并设置适当的扫描间隔。开始扫描目标,注意天气状况,并在系统报警时立即停止工作。扫描完成与后续处理:等待激光扫描仪处于待机状态后,关闭电源。对设备进行散热和清洁,并与附件一同装箱保存。使用计算机软件对采集的3D点云数据进行后处理,获取所需的三维模型或数据。记录与维护:做好激光扫描仪的使用记录,包括扫描时间、目标、参数设置等。定期对设备进行维护,确保其处于比较好工作状态。借助三维扫描仪,我们可以实现对复杂物体的快速复制和批量生产。

维扫描仪的使用方法如下:将C-Track的一端线路连接好,然后将其与控制器连接起来。再将数据线连接到扫描头上,并将扫描头数据线连接到控制器。连接电源与网络:连接控制器的电源,并使用网线将控制器与电脑连接起来。启动与预热:启动控制器进行预热,同时启动相应的软件,完成连接。设备校准:按照指示进行C-Track、扫描头和侧头的校准,确保设备精度。扫描前准备:检查电池、电池架、电缆、充电器等附件是否齐全,并确保电池充满电。将电池、激光扫描仪和电池架连接牢固。将激光扫描仪稳固地固定在三脚架上,并对准扫描目标。插入存储U盘,打开电源,让扫描仪进行自检和优化。连接控制设备(如计算机或PDA)与扫描仪,并检查连接是否成功。扫描操作:设置存储文件名及其路径。获取目标图像,选定扫描区域。计算目标平均距离,设置扫描间隔。开始扫描目标,注意天气状况,如系统报警须停止工作。扫描后处理:等待激光扫描仪处于待机状态后,关闭电源。进行散热和清洁,然后将设备连同附件一同装箱保存。使用计算机软件对采集到的3D点云数据进行后处理。三维扫描仪的自动校准功能,确保了每次扫描的准确性和一致性。便携式三维扫描仪一体化
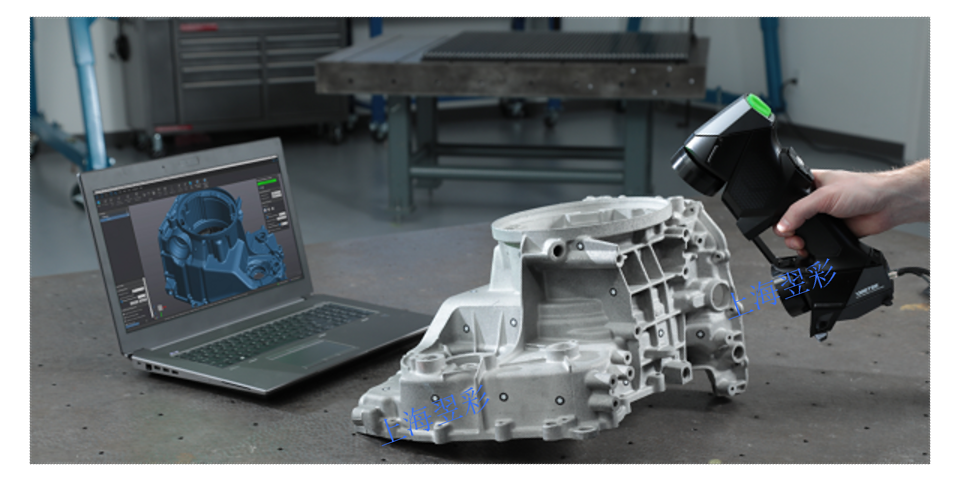
无论是科研实验还是产品设计,三维扫描仪都能为创新提供有力支持。便携式三维扫描仪一体化
提高三维扫描仪的精度是一个综合性的过程,涉及多个方面的优化和调整。以下是一些关键步骤和策略:选择高质量的扫描设备:市场上存在多种类型和品牌的三维扫描仪,如结构光扫描仪、激光扫描仪等。选择具有高精度和高分辨率的设备是确保扫描精度的首要步骤。在购买时,应关注设备的性能指标,如测量范围、重复精度、分辨率等。设置合适的扫描参数:不同的物体或场景需要不同的扫描参数。在进行扫描之前,需要根据实际需求调整扫描仪的参数,如光源强度、曝光时间和分辨率等。适当的参数设置可以提高扫描的清晰度和精度。保持稳定的扫描环境:扫描过程中,环境的稳定性对扫描精度具有重要影响。应避免强光、强风、振动等外部因素的干扰,尽量保持扫描场景环境的稳定。可以使用辅助设备,如固定支架、遮光罩等,来减少环境因素的影响。便携式三维扫描仪一体化



