- 品牌
- 上海洲和
- 型号
- 室内 室外 防爆
- 类型
- 金属探测器,火灾探测器,红外探测器,幕帘式探测器,气体探测器,手持式探测器,AI识别系统
- 加工定制
- 是
- 适用范围
- 网吧,KTV,法院,监狱,电力化工,工业园区,学校厂房,机场铁路,冶金炼钢等,铜线厂,手机厂
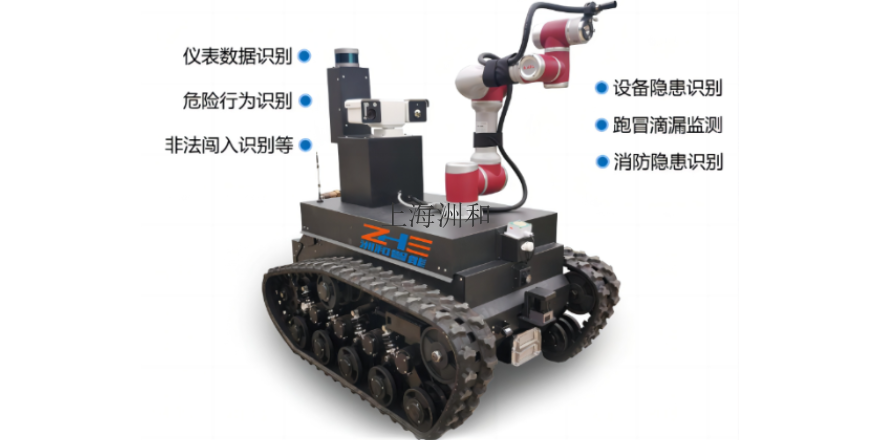
安保室外巡检机器人凭借其多样化的功能和性能,在多个领域发挥着重要作用。以下是关于安保室外巡检机器人在智慧园区、地下管廊、工业厂区、大型建筑施工现场等应用领域的详细介绍:宣传展示:通过搭载高清摄像头和显示屏,机器人可以在园区内宣传展示各类信息,如园区活动、安全提示等。危险行为识别:利用先进的图像识别和智能分析技术,机器人能够识别出园区内的危险行为,如攀爬、奔跑等,并及时发出预警。火灾识别:配备烟雾传感器和热成像摄像头,机器人能够在火灾初期及时发现火源,并通知相关人员进行处理。设备运行状态识别:通过传感器和图像识别技术,机器人可以实时监测园区内各类设备的运行状态,如照明、监控等,确保设备的正常运行。语音交互:提供语音交互功能,方便园区内的人员与机器人进行互动,查询信息或寻求帮助。化水车间设施巡检机器人,高效监测运行,提升用水质量。内蒙古煤矿巡检机器人方案设计

特种机器人-河道清淤机器人技术特点一、断点续航河道清淤机器人在进行清淤作业时,续航能力是其重要的性能指标之一。断点续航技术使得机器人在电量不足时能够自动寻找充电站进行充电,并在充电完成后自动返回断点继续之前的清淤任务。这种技术确保了机器人能够持续、稳定地进行清淤作业,提高了工作效率。二、路径智能规划自主导航:河道清淤机器人采用先进的自主导航技术,能够智能地感知周围环境,通过内置的地图位置和路径规划算法,进行自主导航和位置定位。高效清理:机器人可以智能地规划清理路径,选择比较好的清理路线,避免重复清理和遗漏区域,提高了清淤效率。预测与优化:结合历史数据和实时监测结果,机器人能够预测河道的淤泥积累情况,并自动优化清理计划,提高清淤效率。天津园区巡检机器人价格光伏电缆线路状态巡检机器人,实时传输信息,确保电力传输。

洲和智能科技以其较硬的技术实力和创新能力,专注于研发工业安全巡检机器人和特种环境机器人,致力于满足日益增长的工业自动化和智能化需求。我们的工业安全巡检机器人,是一款能够在复杂多变的工业生产环境中自动执行安全巡检任务的智能设备。它凭借其高效、准确的特点,能够及时发现并预警各种安全隐患,较大提高了巡检效率,有效减少了人工巡检的开支,为企业安全生产提供了有力保障。同时,洲和智能科技还针对各种特殊应用场景,研发了特种环境机器人。这些机器人能够在极端环境下完成危险或复杂的工作,如水下作业、密闭空间、狭窄空间等。它们能够在人无法接近的环境中进行作业,极大地保障了人员的安全,同时也提高了特殊环境下的工作效率。洲和团队深入理解和分析工业领域客户的需求和痛点,致力于为客户提供符合其实际需求的定制化机器人解决方案。我们凭借丰富的经验和专业知识,能够针对客户的具体需求,量身定制机器人产品,帮助客户解决各种工业生产过程中的瓶颈和难题,显著提高生产效率。洲和智能科技将继续秉承“创新、高效、安全”的理念,不断研发更多先进的机器人产品,为工业自动化和智能化发展做出更大的贡献。
上海洲智科技研发的安保巡检机器人,其***性能已***渗透至众多**区域。在繁忙的国际机场与高速列车枢纽站,它能够提供精细的导航指引,助力旅客轻松抵达目的地,确保旅客流动畅通无阻;在繁华的购物中心,该机器人利用先进的语音交互技术,为顾客提供个性化服务,满足他们的多样化需求。在珍贵的文化遗产之地如博物馆、展览中心,上海洲智安保巡检机器人凭借人脸识别技术和对异常行为的敏锐识别能力,为珍贵的展品和参观者提供坚实的保护屏障,确保文化的传承与安全的双重保障。更值得一提的是,这款机器人还具备火灾识别功能,在火灾等紧急情况下,能够迅速反应并发出预警信号,为公共安全筑起坚实的防线。上海洲智安保巡检机器人的***技术与可靠性,赢得了众多场所的信赖,成为现代安防领域中的佼佼者,为社会带来更加安全、便捷的生活体验。智能化巡检,提升企业智能化管理水平。

技术特点自主路径规划:机器人具备可靠的自主路径规划功能,能够在复杂环境下实现高精度、强灵活性的自动驾驶。室内外复杂环境定位:通过综合运用多种传感器系统,如超宽带无线基站组网定位(UWB)、激光雷达(LIDAR)等,实现室内外复杂环境下的精细定位。全域障碍物避障:通过激光雷达、环向超声波传感器及云台相机等组合,实现对机器人所处环境的AI识别,确保在自主巡检过程中的静态点位障碍区主动避障和复杂环境下动态障碍物的实时避障功能。手势指挥的人机交互体验:机器人能够识别不同光线环境下作业人员的手势信息,并通过自建的手势识别数据库与机器人实现实时的手势交流互动,对机器人进行动作控制。巡检新选择,机器人让管理更轻松。上海电力巡检机器人公司
巡检智能化,提升行业竞争力。内蒙古煤矿巡检机器人方案设计
系统组成智能巡检机器人采用SLAMTEC自主定位导航套装,由两部分组成:高性能激光雷达RPLIDAR:这是一种高精度、高可靠性的激光测距传感器,能够进行360度的环境扫描,快速获取机器人周围环境的轮廓信息。定位导航控制SLAMWARE:这是一个强大的软件平台,负责处理激光雷达收集的数据,实现机器人的自主定位、自动建图、路径规划与自动避障。环境扫描与信息采集:通过内置的高性能激光雷达RPLIDAR,机器人对周围环境进行360度的扫描,获得丰富的环境轮廓信息。自主定位与建图:将激光雷达采集到的环境轮廓信息与机器人之前已经建立的信息图进行匹配和比对。利用SLAM(同步定位与地图构建)算法,机器人能够在未知环境中实现自我定位和地图构建。随着机器人的移动,它会不断更新和完善这个地图。内蒙古煤矿巡检机器人方案设计

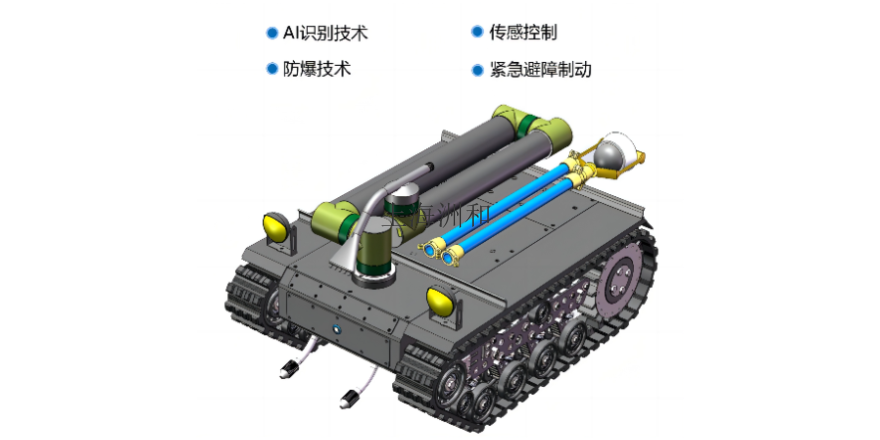
一、防爆设计原理材料选择:防爆巡检机器人采用耐高温、抗冲击、防爆性能强的特殊材料制成,如不锈钢、铝合金等,确保机器人在易燃易爆环境中能够稳定运行。结构设计:机器人的整体结构设计符合防爆标准,如采用密封式外壳,确保内部电路和电池等关键部件在性环境中不会受到损害。二、环境感知与识别传感器集成:防爆巡检机器人集成了多种传感器,如气体检测传感器、温度传感器、湿度传感器、压力传感器等,能够实时监测环境中的各项参数。气体检测传感器:能够检测环境中的可燃气体、有毒气体等浓度,及时发现泄漏情况。温度传感器:用于监测设备的温度,发现过热等异常情况。湿度传感器:监测环境湿度,预防因湿度过高或过低导致的设备故障。压...
- 贵州轨道巡检机器人厂家 2024-12-05
- 吉林冶金巡检机器人施工方案 2024-12-05
- 西藏室内巡检机器人施工方案 2024-12-05
- 湖北农村巡检机器人工程 2024-12-05
- 海南室内巡检机器人方案设计 2024-12-05
- 河北煤矿巡检机器人造价 2024-12-05
- 广东AI巡检机器人技术 2024-12-04
- 贵州工厂巡检机器人厂家 2024-12-04
- 广西室内巡检机器人工程 2024-12-04
- 河南AI巡检机器人公司 2024-12-04

- 广东智能机器巡检机器人施工方案 2024-12-04
- 江西智能巡检机器人造价 2024-12-04
- 湖南巡检机器人技术 2024-12-04
- 山西煤矿巡检机器人 2024-12-04
- 江苏室内巡检机器人方案 2024-12-04
- 河南AI巡检机器人 2024-12-04


- 海南室内巡检机器人方案设计 12-05
- 河北煤矿巡检机器人造价 12-05
- 广东AI巡检机器人技术 12-04
- 贵州工厂巡检机器人厂家 12-04
- 广西室内巡检机器人工程 12-04
- 油阀远程控制器报价 12-04
- 河南AI巡检机器人公司 12-04
- 重庆轨道巡检机器人定制 12-04
- 吉林室外巡检机器人工程 12-04
- 北京轨道巡检机器人施工方案 12-04