运动操控算法可通过以下多种方式提高自动化智能机器人实验台的操作精度:误差补偿与校正方面PID操控算法:比例(P)环节能迅速根据当前误差调整操控量,使机器人迅速向目标位置靠近;积分(I)环节可累积过去的误差,稳态误差,确保机器人**终能精确到达目标位置,而不会存在残留偏差;微分(D)环节能...
自动化智能机器人实验台基本参数
- 品牌
- VALENIAN/瓦伦尼安
- 型号
- VT-ZP500
- 类型
- 自动化实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 10
- 产地
- 苏州
- 厂家
- 昆山汉吉龙测控技术有限公司
自动化智能机器人实验台企业商机
自动化智能机器人实验台通常是可以与不同软件配合的,以下从其与多种软件配合的类型及方式进行介绍:常见可配合的软件类型编程软件:实验台常与C、C++、Python等编程语言的开发软件配合,用于编写机器人的程序,实现各种动作和任务逻辑。如在ROS(机器人操作系统)环境下,常使用Python或C++进行机器人功能的开发。软件:能与V-REP、Webots等机器人软件配合。在这些软件中可构建与实验台相似的虚拟环境,对机器人的运动轨迹、任务规划等进行测试,提前验证算法和程序的可行性,减少在实际实验台上的调试时间。数据分析软件:实验台采集到的数据可传输至MATLAB、Excel等数据分析软件中,进行数据的处理、绘图和统计分析,帮助研究人员了解机器人的性能和实验结果,如分析机器人运动过程中的速度、加速度等数据。建模软件:与SolidWorks、AutoCAD等三维建模软件配合,可根据实验需求为机器人设计和建模新的零部件或工装夹具,然后通过3D打印等技术制造出来并应用于实验台。人工智能软件:与TensorFlow、PyTorch等人工智能框架配合,实现机器人的机器学习和深度学习功能,如让机器人通过图像识别软件进行目标识别和分类任务,提升机器人的智能化水平。 智能机器人实验台至关重要吗?气路连接自动化智能机器人实验台原理

在自动化智能机器人领域,实验台作为重要的研究和测试平台,对其产生的数据进行分析具有极其关键的意义,主要体现在以下几个方面:优化机器人性能运动优化:通过分析实验台采集的机器人运动数据,如关节角度、速度、加速度等,可以深入了解机器人的运动特性和性能表现。例如,发现机器人在某些动作执行过程中存在速度波动或加速度过大的问题,就可以针对性地调整算法和参数,优化机器人的运动轨迹和姿态,提高其运动的平稳性和准确性。能源效率提升:对机器人在不同任务和工作模式下的能耗数据进行分析,能够找出能源消耗的关键点和优化空间。比如,分析发现机器人在某些操作环节能源利用率较低,就可以通过改进动力系统、优化任务规划等方式,降低能耗,延长机器人的工作时间,提高其能源效率。 智能化自动化智能机器人实验台连接自动化智能机器人实验台厂家?

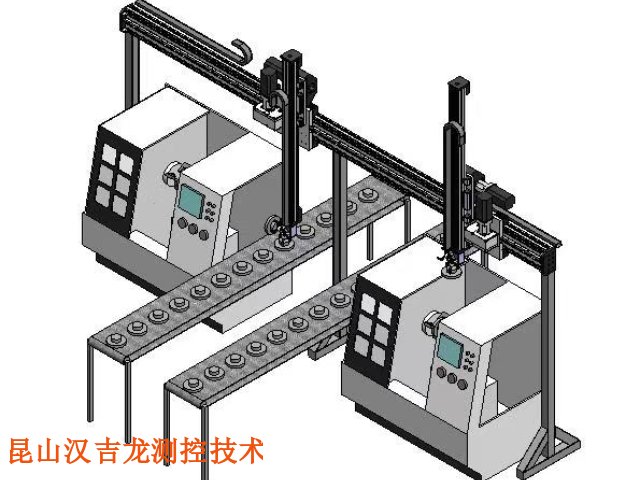
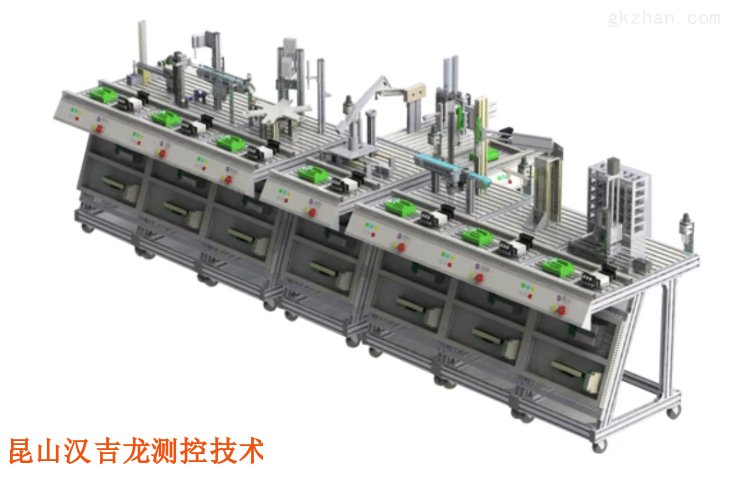
自动化智能机器人实验台的应用领域十分***,主要包括以下几个方面:工业制造领域生产工艺研发与优化:用于模拟汽车零部件、电子产品等的生产装配过程,研究新型生产工艺的可行性和优化空间,如探索更焊接、铆接工艺等。质量检测:搭载视觉检测系统等对产品进行外观缺陷检测、尺寸测量等,还能模拟产品在不同环境下的使用情况,进行可靠性测试,如对手机进行落、按键寿命等测试。物流与仓储管理:模拟智能物流系统中的货物搬运、存储和分拣过程,研发更物流调度算法和仓储布局方案,提高物流效率和准确性。科研教育领域高校教学实验:帮助学生理解机器人的运动、编程原理等知识,通过实践操作培养学生的动手能力和创新思维,如机械学生可进行机器人轨迹规划实验等。科研机构研发:为科研人员提供平台,开展机器人相关的前沿技术研究,如新型传感器研发、人工智能算法优化等,推动机器人技术的发展。学术研究实验:在物理、化学、等学科研究中,用于操作实验设备、采集数据等,如在化学实验中进行精确配比和反应操作。
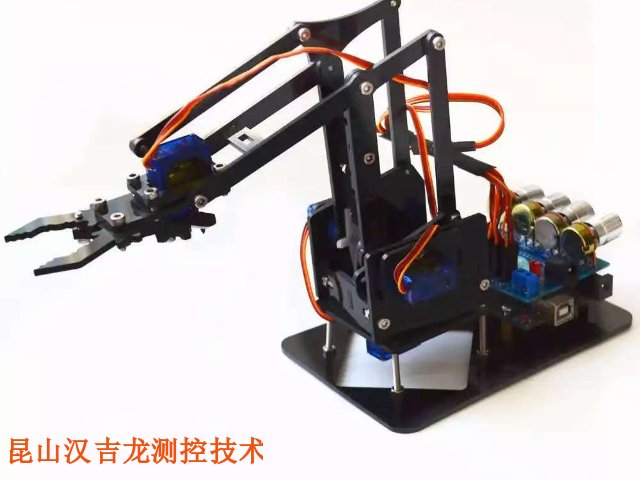
自动化智能机器人实验台硬件选型选用成熟的商业组件:优先选择市场上成熟的、经过验证的硬件产品,避免自行开发高成本的定制化硬件。例如,在选择处理器、传感器时,可选用主流的、性价比高的产品。考虑开源硬件平台:利用开源硬件平台,如Arduino、RaspberryPi等,这些平台具有丰富的资源和社区支持,可以迅速搭建实验原型,降低硬件开发成本。优化硬件配置:根据实验台的实际性能需求,合理配置硬件资源,避免过度配置造成资源浪费和成本增加。比如,根据数据处理量和运算速度的要求,选择合适性能的处理器和内存。软件研发利用开源软件和框架:使用开源的操作系统、机器人开发框架(如ROS)、算法库等,减少软件开发的工作量和成本。这些开源资源通常有活跃的社区支持,可方便地获取技术支持和更新。代码复用和共享:建立企业内部的代码库,鼓励研发人员在项目中复用已有的代码,提高代码的利用率,减少重复开发。采用敏捷开发方法:采用敏捷开发方法,迅速迭代,及时发现和解决问题,避免在开发后期因需求变更等原因导致的大规模返工。 自动化智能机器人实验台能适应需求吗?

故障诊断算法基于规则的诊断算法:根据预先设定的规则,将传感器数据与阈值或逻辑条件进行对比,判断机器人是否存在故障以及故障类型。例如,当电机温度超过80摄氏度时,判定电机过热故障;当某个关节的角度偏差超过5度时,判定关节位置异常故障。神经网络诊断算法:利用神经网络的强大学习能力,通过大量的故障样本数据对网络进行训练,使其能够自动提取故障特征,实现对机器人故障的准确诊断。如将机器人不同故障状态下的传感器数据作为输入,故障类型作为输出,训练神经网络,训练好的网络可对新的未知数据进行故障诊断。性能评估算法均方误差(MSE)算法:用于评估机器人实际输出与预期输出之间的差异,计算预测值与真实值之差的平方的平均值。在机器人运动中,可计算机器人实际运动轨迹与规划轨迹之间的均方误差,评估运动精度,MSE值越小,说明精度越高。峰值信噪比(PSNR)算法:常用于图像和视频处理相关的机器人任务中,如视觉检测机器人。它衡量的是处理后的图像或视频与原始图像或视频之间的峰值信噪比,PSNR值越高,说明图像或视频质量越好,机器人的视觉处理性能越高。自动化智能机器人实验台能与不同软件配合吗?共享自动化智能机器人实验台操作步骤
自动化智能机器人实验台可模拟多种工作场景。气路连接自动化智能机器人实验台原理
精密机械部件:包括高精度的机械臂、关节、导轨、电机、减速器等,以确保机器人的精确运动和操作。一个高精度的机械臂可能就需要几十万元。其他辅助设备:还需要电源系统、通信模块、数据存储设备等,以及为保证实验台稳定运行的配套设备,如柜、操作台等,这些硬件设备的成本也不容小觑。软件成本操作系统和开发工具:可能需要购买实时操作系统、机器人开发框架以及各种软件工具,如ROS(机器人操作系统)等,部分商业软件需要支付高额的授权费用。算法研发和优化:开发复杂的路径规划算法、运动算法、人工智能算法等需要大量的时间和精力,可能还需要购买相关的算法库或模型,增加了软件研发成本。软件测试和维护:为确保软件的稳定性和可靠性,需要进行大量的测试和后续维护工作,这也会产生持续的费用。 气路连接自动化智能机器人实验台原理
与自动化智能机器人实验台相关的文章
实物自动化智能机器人实验台怎么用
- 高校自动化智能机器人实验台使用 2025-03-01
- 自动化智能机器人实验台内容 2025-03-01
- 电机自动化智能机器人实验台特点 2025-03-01
- 进口自动化智能机器人实验台厂家 2025-02-28
- 汉吉龙自动化智能机器人实验台电话 2025-02-28
- 电机自动化智能机器人实验台产线 2025-02-27
- 定制自动化智能机器人实验台工作原理 2025-02-27
- 预测性自动化智能机器人实验台制造商 2025-02-27
- 自动化智能机器人实验台供应商 2025-02-26
- 自动化装置自动化智能机器人实验台用途 2025-02-25
- 气路连接自动化智能机器人实验台 2025-02-25
- 气路连接自动化智能机器人实验台课程 2025-02-25
与自动化智能机器人实验台相关的产品
与自动化智能机器人实验台相关的新闻
-
实物自动化智能机器人实验台使用方法 2025-02-24 09:06:50VALENIAN自动化智能机器人实验台数据处理与通信方面海量数据处理:实验过程中,机器人和各种传感器会产生大量数据,如高分辨率图像、实时监测数据等。对这些海量数据进行迅速采集、存储、分析和挖掘,从中提取有价值的信息,以支持实验决策和优化,需要强大的数据处理能力和数据处理算法2。实时通信可...
-
材料仓库自动化智能机器人实验台 2025-02-23 08:06:39自动化智能机器人实验台数据挖掘与预测算法关联规则挖掘算法:如Apriori算法,用于发现数据集中不同变量之间的关联关系。在机器人实验数据中,可挖掘出机器人的某些操作行为与特定环境因素或其他系统状态之间的关联,例如发现当环境温度较高时,机器人的某个部件更容易出现故障,为故障维护提供依据。时...
-
重载自动化智能机器人实验台公司 2025-02-23 22:05:09瓦伦尼安教学设备有限公司降低功能复杂的自动化智能机器人实验台的研发成本,可从以下几个方面入手:设计优化简化设计:对实验台的功能进行***梳理,去除不必要的复杂功能和组件,在满足**需求的基础上,使设计尽可能简洁。例如,若某些功能在实际应用场景中很少用到,可考虑舍去2。模块化设计:将实验台...
-
自动化智能机器人实验台图片 2025-02-23 09:06:49故障诊断算法基于规则的诊断算法:根据预先设定的规则,将传感器数据与阈值或逻辑条件进行对比,判断机器人是否存在故障以及故障类型。例如,当电机温度超过80摄氏度时,判定电机过热故障;当某个关节的角度偏差超过5度时,判定关节位置异常故障。神经网络诊断算法:利用神经网络的强大学习能力,通过大量的故障...
与自动化智能机器人实验台相关的问题
新闻资讯
产品推荐
-

CCD无线激光对中仪工作原理
2026-02-14 -

进口快速对中校正仪哪里买
2026-02-14 -
红外联轴器不对中测量仪现状
2026-02-14 -

专业级轴对中激光仪哪家好
2026-02-14 -

欧洲无线激光对中仪调试
2026-02-14 -
新一代联轴器振动红外对中仪激光
2026-02-13 -
CCD联轴器振动红外对中仪维修
2026-02-13 -

机械轴对中激光仪的作用
2026-02-13 -

经济型联轴器振动红外对中仪厂家排名
2026-02-13