- 品牌
- 宏智铭,升泰电气
- 型号
- 齐全
- 加工定制
- 是
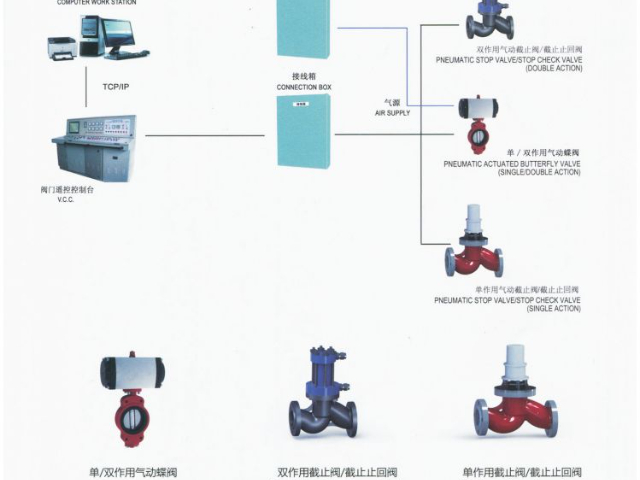
气动式阀门遥控系统的工作原理:
当需要操作阀门时,控制单元根据接收到的遥控信号或者预设的程序,发出控制指令给气动控制阀。例如,如果是开启阀门的指令,电磁阀会动作,使压缩空气通过管道进入阀门执行机构(气缸或者气动马达)的相应腔室。对于气缸,压缩空气推动活塞向开启阀门的方向运动,带动阀杆开启阀门;对于气动马达,压缩空气驱动马达旋转,使阀芯旋转打开阀门。在阀门动作过程中,反馈单元实时采集阀门的开度和状态信息,并将这些信息反馈给控制单元。控制单元根据反馈信息可以对阀门的动作进行调整,如当阀门达到预定开度时,控制单元可以控制气动控制阀停止供气,使阀门保持在设定的开度位置。 阀门遥控系统服务,就选无锡宏智铭科技,让您满意,欢迎新老客户来电!阀门遥控系统
电液式阀门遥控系统的系统可靠性和稳定性
电气和液压部件的可靠性:系统中的电气控制单元通常采用高质量的电子元件,具有冗余设计和故障诊断功能。例如,可编程逻辑控制器(PLC)可以进行自我诊断,当发现部分元件出现故障时,能够及时切换到备用模块或发出警报,确保系统的正常运行。液压动力单元和执行机构也经过严格的质量检验,采用好的材料和密封技术,减少液压油泄漏的风险,保证液压系统的稳定运行。抗干扰能力强:电液式阀门遥控系统在电气控制方面,通过合理的布线、信号屏蔽和滤波等措施,能够有效抵御外界电磁干扰。在液压方面,液压油本身具有一定的稳定性,受外界环境因素(如温度、湿度等)干扰相对较小。例如,在工业现场存在大量电机、变频器等设备产生的电磁干扰环境下,系统依然能够稳定地传输控制信号和反馈信息,保证阀门的正常遥控操作。 青岛阀门遥控系统产品无锡宏智铭科技供应阀门遥控系统,欢迎您的来电哦!
液压式阀门遥控系统的执行机构技术:
液压缸和液压马达技术
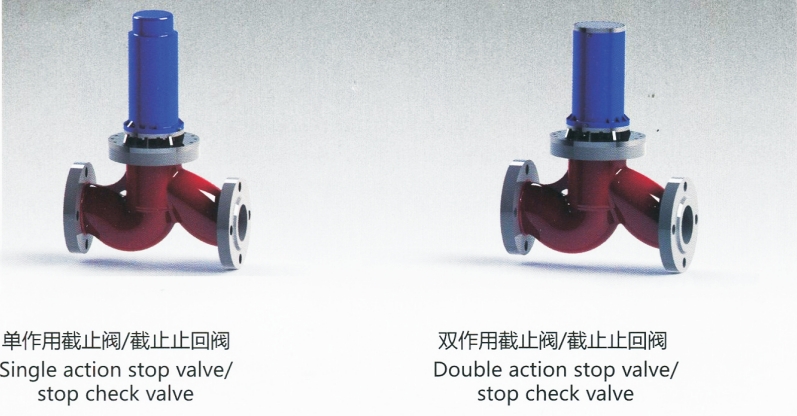
对于直线运动的阀门(如闸阀、截止阀等),液压缸是主要的执行机构。液压缸通过液压油的压力推动活塞运动,从而带动阀门的阀杆实现开启和关闭动作。其关键技术在于活塞的密封技术,要确保液压油不会泄漏,同时活塞的运动精度和响应速度也很重要。对于旋转运动的阀门(如球阀、蝶阀等),液压马达是常用的执行机构。液压马达将液压能转换为机械能,驱动阀门的阀芯旋转。液压马达的扭矩输出、转速控制和效率是其关键技术指标,需要根据阀门的具体要求进行选择和优化。
电液式阀门遥控系统的精确控制性能
开度控制精度高:电液式阀门遥控系统采用先进的电气控制与液压驱动相结合的方式。通过电气控制单元中的精密算法,如比例 - 积分 - 微分(PID)控制算法,能够根据传感器反馈的阀门开度信息,对阀门开度进行精确调整。例如,在一些对流量要求极高的精细化工生产过程中,系统可以将阀门开度控制在误差极小的范围内,确保化工原料按照精确的比例混合,这对于产品质量的稳定控制至关重要。动作速度精细调节:系统不仅能精确控制阀门的开度,还可以对阀门的动作速度进行精细调节。在不同的工业场景下,根据实际需求,可以使阀门缓慢开启或快速关闭。例如,在大型水电站的水轮机进水阀门控制中,在启动过程中可以缓慢开启阀门,使水流平稳地进入水轮机,避免因水流冲击过大对设备造成损坏;而在紧急停机情况下,又能够快速关闭阀门,截断水流,保护设备安全。 无锡宏智铭科技是一家专业提供不锈钢阀门遥控系统的公司。
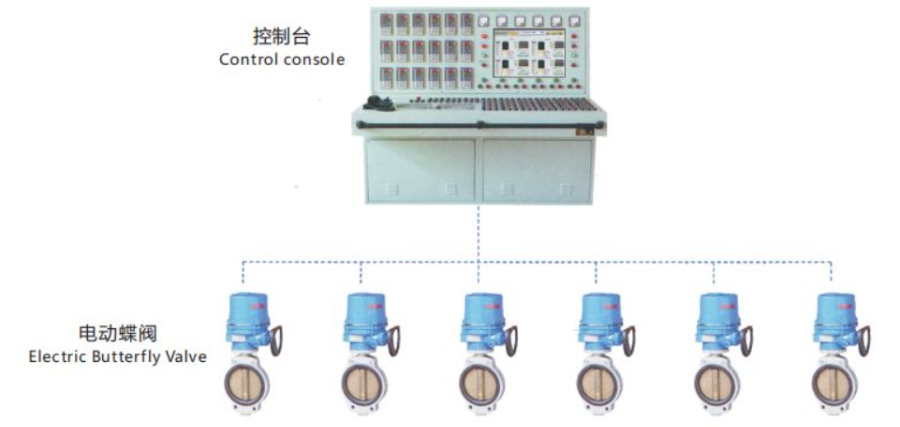
电动阀门遥控系统由阀控箱(台)、电动驱动头、电控蝶阀、电控截止/截止止回阀等组成。阀控台上同样带有遥控阀管路系统的模拟板/电脑,可在模拟板/电脑上进行所有阀的开/关操作,并带有反馈信号显示和综合故报警,电动驱动头配有应急操作装置,在电源失效的情况下,可以手动开闭阀门。电动式阀门遥控装置由控制台、电动驱动头、阀门、电源等组成。装置以交流电源为动力,对阀门进行远距离集中控制。具有配置灵活、安装简便、操作方便等特点。适用于船坞、坞门、散货船、集装箱船、工程船、驳船等各类船舶中管路阀门的启、闭控制。无锡宏智铭科技致力于提供阀门遥控系统,有需要可以联系我司哦!电动蝶阀阀门遥控系统报价
阀门遥控系统服务,就选无锡宏智铭科技,有想法的可以来电咨询!阀门遥控系统
电液式阀门遥控系统的多功能性与适应性
适配多种阀门类型:该系统可以与多种类型的阀门配合使用,无论是闸阀、截止阀等直线运动的阀门,还是球阀、蝶阀等旋转运动的阀门,都能通过合适的液压执行机构(如液压缸或液压马达)实现远程控制。这种多功能性使得它在不同的工业领域和工程应用中都能发挥作用。可扩展性和集成性强:电液式阀门遥控系统可以很容易地与其他工业自动化系统集成,如分布式控制系统(DCS)或监控与数据采集(SCADA)系统。同时,系统还具有可扩展性,可以根据实际需要增加阀门控制数量或功能模块。例如,在工厂的自动化升级过程中,它可以方便地融入新的自动化控制系统架构,实现整个工厂的智能化管理。 阀门遥控系统
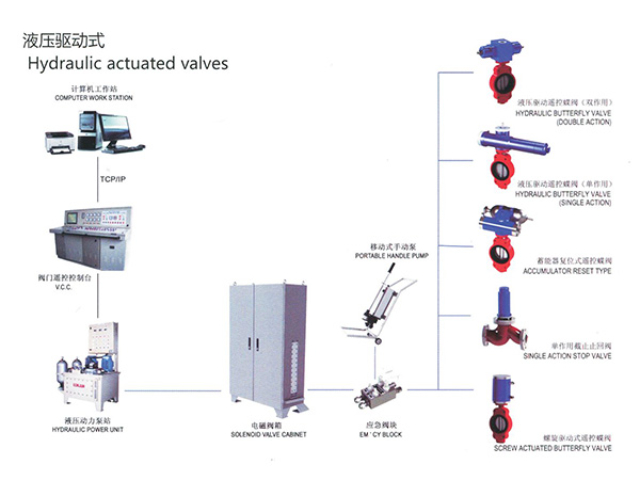
液压阀门遥控装置由控制台、液压泵站、电磁阀箱、液动阀门、应急手动泵及应急阀块等组成。装置以液压油为动力,可手动或电脑自动对阀门进行远距离集中控制,具有操作方便、安全可靠的特点。适用于油船、化学品船、石油平台、散货船等各类船舶中管路阀门的远距离启、闭控制。液压阀门遥控装置由控制台、液压泵站、电磁阀箱、液动阀门、应急手动泵及应急阀块等组成。装置以液压油为动力,可手动或电脑自动对阀门进行远距离集中控制,具有操作方便、安全可靠的特点无锡宏智铭科技致力于提供定制各类阀门遥控系统服务,欢迎您的来电!南昌电动式阀门遥控系统 电动式阀门遥控系统在船舶领域的应用,货油输送系统方面: 装卸货油:在油轮或运...
- 合肥阀门遥控系统报价 2026-04-25
- 苏州阀门遥控系统产品 2026-04-25
- 电液式阀门遥控系统报价 2026-04-25
- 南昌电液式阀门遥控系统 2026-03-28
- 瑞昌阀门遥控系统 2026-03-28
- 葫芦岛电动蝶阀阀门遥控系统 2026-03-28
- 江苏船舶抗倾倒阀门遥控系统 2026-03-28
- 上海阀门遥控系统多少钱 2026-03-28
- 恩施电液式阀门遥控系统 2026-03-28
- 东营阀门遥控系统产品 2026-03-27


- 茂名电动蝶阀阀门遥控系统 2026-03-27
- 芜湖液压式阀门遥控系统 2026-03-27
- 北海电液式阀门遥控系统 2026-03-27
- 合肥阀门遥控系统 2026-03-27
- 丹东阀门遥控系统准确 2026-03-27
- 江苏阀门遥控系统定价 2026-03-27