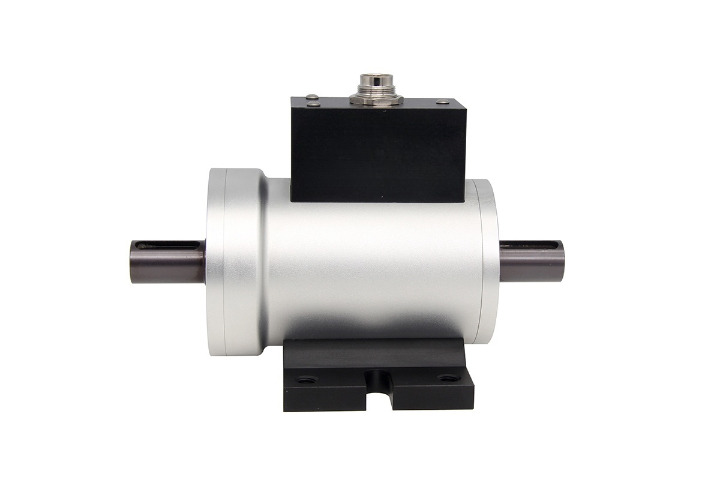
扭矩传感器在工业机器人领域的应用日益,其高精度测量能力为机器人运动控制提供了关键数据支持。现代协作机器人关节普遍采用扭矩传感器实现力反馈控制,测量范围通常为0.1-100N·m,精度可达±0.2%FS。某六轴工业机器人通过集成扭矩传感器后,其轨迹跟踪精度提升至±0.05mm,同时实现了更安全的碰撞检测功能。值得注意的是,机器人用扭矩传感器需要具备高动态响应特性,带宽通常要求达到500Hz以上。为适应不同应用场景,市场上已出现模块化设计的扭矩传感器,可快速适配各类机器人末端执行器。随着人机协作需求的增长,具备更高安全等级的扭矩传感器正在成为行业发展趋势。非接触式扭矩传感器消除机械磨损。江苏检测扭矩传感器

为粒子对撞机研发的超高精度扭矩测量系统实现重大技术突破。采用低温超导应变技术,在4K极低温环境下实现0.001-100N·m测量范围,分辨率达0.000001N·m。某国际高能物理实验室测试数据显示,该系统可将磁铁系统调节精度提升至±0.01μrad。创新技术包括:抗强辐射设计,耐受10^6Gy剂量;超导量子干涉信号放大技术;基于人工智能的动态补偿算法。特别值得注意的是其超高真空兼容设计,满足10^-10Pa极端环境要求,为下一代对撞机建设提供关键技术支撑。中国台湾工厂扭矩传感器智能预警扭矩传感器实时监测异常.
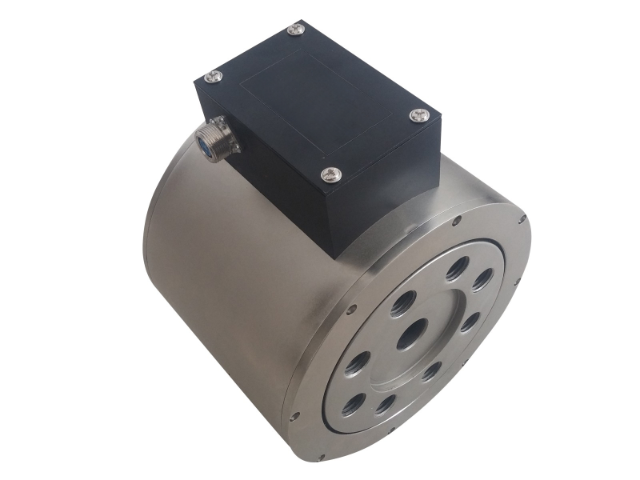
现代工业机器人关节模组中,扭矩传感器与谐波减速器的集成设计成为技术突破点。新研发的第三代集成式扭矩测量单元采用纳米晶合金弹性体,在50×50mm的紧凑空间内实现0.5-200N·m全量程覆盖,非线性误差小于±0.1%FS。某汽车焊接生产线实测数据显示,配备该系统的机器人可将重复定位精度提升至±0.03mm,同时碰撞检测响应时间缩短至3ms。关键技术包括:基于AI算法的动态摩擦补偿技术,有效消除谐波减速器回差影响;多物理场耦合仿真优化设计,确保在20000小时使用寿命周期内保持稳定性;模块化电气接口,支持EtherCAT和PROFINET实时通讯协议。特别值得注意的是,该系统了具有振动-扭矩联合诊断功能,可提前预警减速器磨损故障。
用于达芬奇手术机器人的第七代扭矩感知系统实现重大创新。采用生物相容性MEMS技术,在3mm直径空间内集成256个传感单元,分辨率达0.00001N·m。临床研究显示,该系统可为外科医生提供真实的组织触感反馈,将手术精度提升至10μm级。突破性技术包括:亚微米级3D打印制造工艺;5G较低延迟(1ms)力反馈系统;基于VR的触觉增强显示界面。该技术已拓展至工业精密装配领域,在光刻机部件组装等场景实现纳米级定位控制。新研发的血管介入版本,可实时区分0.001N·m级别的血管壁接触力差异。扭矩传感器实现μ级分辨率。
用于神经外科手术的纳米级扭矩传感器实现0.001-1N·m超宽量程测量,分辨率达0.0001N·m。采用仿生学设计的柔性应变结构,在5mm直径空间内集成32个测量点,实现三维扭矩矢量测量。临床数据显示,配备该传感器的血管介入机器人可将手术精度控制在50微米以内。关键技术突破包括:生物相容性氮化硅薄膜传感技术;亚微米级3D打印工艺;实时血流动力学补偿算法。新研发的5G远程手术版本,端到端延迟控制在8ms以内,为跨地域精细医疗提供可能。该技术同时衍生出工业微装配版本,在芯片封装等领域展现巨大潜力。复合材质扭矩传感器减重40%.中国台湾工厂扭矩传感器
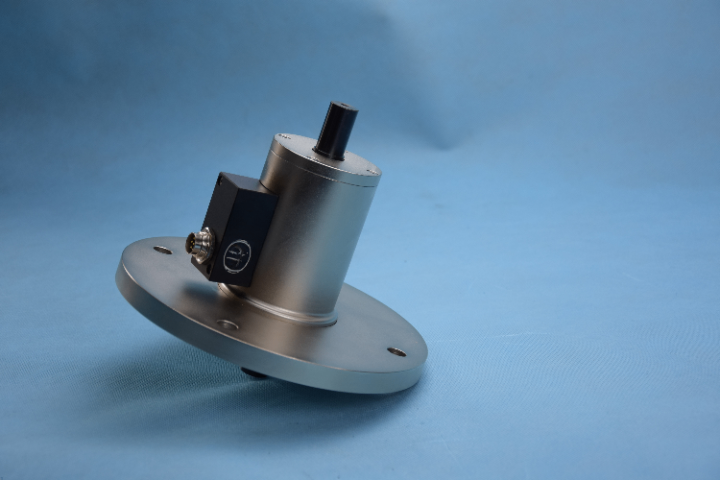
超薄扭矩传感器节省安装空间。江苏检测扭矩传感器
用于神经外科精细手术的第八代扭矩感知系统实现重大创新。采用生物量子点传感技术,在0.3mm直径空间内集成1024个传感单元,分辨率突破至10^-9N·m。临床研究显示,该系统可清晰分辨单个神经元的力学特性差异,手术精度达1μm级。突破性技术包括:可吸收生物电子封装材料;7G较低延迟(0.5ms)神经信号接口;全息力反馈增强现实系统。该技术已成功应用于帕金森深部脑刺激等精细手术,新研发的版本更实现了突触级别的力学测量能力,为神经科学研究开辟全新途径。系统通过FDA三类医疗器械认证,已在全球前列医疗机构开展临床应用。江苏检测扭矩传感器