软脚检测(柔性联轴器校准关键前置环节)柔性联轴器的弹性补偿特性易掩盖软脚导致的隐性偏差,需优先通过激光对中仪的软脚测试功能消除底座形变干扰:参数设置:启动HOJOLO设备并进入“Softfoot”模式,输入测量参数:S(固定端激光探头)到M(移动端探头)的距离;S到动设备前地脚(F1)、后地脚(F2...
激光联轴器对中仪基本参数
- 品牌
- HOJOLO,LEAKSHOOTER
- 型号
- AS500
- 类型
- 激光对中仪
- 重量
- 1
- 产地
- 苏州
- 厂家
- 汉吉龙测控技术有限公司
激光联轴器对中仪企业商机
激光联轴器对中仪的动态补偿技术,是通过多传感数据融合、实时算法修正、工况模型适配三大**机制,抵消设备运行中振动、温度变化、安装偏差等动态干扰,维持校准精度的稳定性。以HOJOLOAS500等**型号为例,其技术原理可拆解为“干扰感知-数据处理-偏差修正”的全流程闭环,具体工作机制如下:一、动态干扰的多维度感知:传感器矩阵实时捕捉异常信号动态补偿的前提是精细识别干扰源,仪器通过集成多类型传感器,构建***干扰监测体系:双激光束对比传感:采用635-670nm双半导体激光发射器,两束激光平行投射至CCD探测器(分辨率达)。当设备振动(如中高转速下的轴系共振)导致测量单元偏移时,两束激光的光斑偏移量会产生微小差异,系统通过计算差值剔除共性振动干扰(如支架共振引发的同步偏移),*保留轴系真实对中偏差。例如在3000rpm压缩机校准中,单激光测量可能因振动产生±,双激光对比可将误差压缩至±。数字倾角仪实时监测:内置高精度倾角传感器(精度±°),持续检测测量单元的安装姿态变化,主要针对两类偏差:一是软脚偏差(地脚螺栓松动或基础沉降导致的轴系倾斜),当倾角变化超过°时,系统自动计算倾斜角度对激光光路的影响,修正径向偏差数据。激光联轴器对中仪配备专业技术团队,随时提供上门指导服务。专业激光联轴器对中仪电话
激光联轴器对中仪
国内外**标准对激光对中仪的精度指标有明确量化界定,是选型与校准的**依据:1.国内校准规范(JJF浙1196-2023)该规范明确激光对中仪的**精度要求:位移分辨力:不低于0.001mm,单向测量范围≤±20mm时,最大允许误差需满足“±0.010mm+(0.001mm+1%×测量距离)”。例如测量跨距为1000mm时,允许误差≤±0.010mm+(0.001mm+10mm)=±10.011mm(实际工业中需结合设备等级压缩误差范围);倾角分辨力:不低于0.1°,在45°校准点进行10次连续测量,重复性误差需≤±0.01°,确保角度测量的稳定性。2.国际标准(ISO1940、VDI2145)ISO1940:针对旋转设备平衡等级的精度要求,G2.5级(常规工业设备)对应激光对中仪的径向偏差精度需≤0.03mm/m,角度偏差≤0.03°/m。例如跨距为2m的泵组,径向总偏差需控制在±0.06mm以内,这要求仪器基础精度至少达到±0.01mm;VDI2145:规定激光对中仪的测量误差需≤被测量值的5%,且比较大***误差≤±0.01mm。如校准径向偏差为0.1mm的轴系时,仪器误差需≤±0.005mm,因此需选择±0.001mm级精度的设备。质量激光联轴器对中仪激光联轴器对中仪的校准精度有效期能维持多久?

在复杂工业场景中,动态补偿技术的作用尤为***,以下为两类典型案例:高温压缩机校准:某石化厂丙烯压缩机(运行温度80℃,转速3000rpm),未启用动态补偿时,冷态校准的径向偏差为0.01mm,但热态运行时因轴系热膨胀,实际偏差达0.035mm;启用AS500的热膨胀补偿与双激光振动补偿后,冷态校准预留0.009mm热膨胀量,热态实际偏差控制在0.012mm内,轴承寿命延长80%。高振动泵组校准:某电厂给水泵(转速1500rpm,振动幅值0.3mm/s),单激光测量显示径向偏差0.025mm,启用双激光对比补偿后,剔除支架共振干扰,真实偏差*0.008mm,调整后振动幅值降至0.1mm/s以下。激光联轴器对中仪的动态补偿技术,本质是通过“传感器感知干扰-算法剥离噪声-实时修正偏差”的协同机制,将工况动态变化对校准精度的影响降至比较低。HOJOLO等品牌的**型号通过多技术集成,已实现对振动、温度、安装偏差等多类型干扰的精细补偿,确保在复杂工况下仍能输出可靠的对中数据。
激光联轴器对中仪短时间重复校准的精度数据存在微小可控波动,符合以下特征即可判定为“一致性合格”:位移重复性≤0.003mm(**机型)或≤0.01mm(普通机型),角度重复性≤±0.002°;连续测量数据的波动范围≤仪器标称示值误差的1/3;与外部基准(如千分表、标准轴系)的对比差值≤0.005mm。若超出上述范围,需优先排查支架安装牢固性、环境振动/温度变化,其次检查仪器补偿功能是否开启(如双激光补偿、温度漂移修正),**终通过校准规范确认仪器是否需要重新检定。激光联轴器对中仪在多轴系设备校准中的精度表现如何?

尽管**型号表现优异,但多轴系校准精度仍受以下因素制约,需在实际操作中规避:安装与环境干扰:多轴系的复杂布局可能导致激光光路遮挡,若传感器安装偏差>°,会使测量误差增大30%以上。此外,环境温度波动>2℃/小时或强电磁干扰(如靠近中频炉),可能导致AS300等中端型号的补偿算法失效,精度从。轴系累积误差传递:在3轴以上的长跨距系统中,单轴校准偏差会通过联轴器传递至整个轴系。例如某风电齿轮箱多轴校准中,未考虑低速轴与高速轴的偏差耦合关系,导致初始校准后仍存在,需通过AS500的跨轴数据融合功能重新优化调整方案。型号功能匹配度:基础型号因缺乏旋转轴轴心定位功能,无法完成五轴机床A/B轴的高精度校准;而AS500的红外热成像与振动分析功能虽能提升多轴诊断精度,但在*需简单对中的泵组场景中,可能因功能冗余导致操作效率下降(校准时间增加15%)。HOJOLO激光联轴器对中仪在多轴系校准中的精度表现可满足从基础工业到精密制造的分层需求:**型号(AS500)通过多技术协同实现微米级精度,适配高要求场景;中端及基础型号则以性价比优势覆盖常规需求。实际应用中需根据多轴设备的精度等级、工况复杂度及跨距参数,选择匹配的型号并严格遵循校准流程。 针对不同直径轴系,激光联轴器对中仪可快速更换适配夹具。CCD激光联轴器对中仪装置
激光联轴器对中仪在远程操控模式下,校准精度会打折扣吗?专业激光联轴器对中仪电话
柔性联轴器专项调整策略结合HOJOLO的算法优势与柔性联轴器的弹性特性,采用“分步调整+动态补偿”方案:参数输入与补偿设置:进入设备的“柔性联轴器模式”,输入弹性体材质参数(如聚氨酯弹性模量2.5GPa)、工况温度(如正常运行温度70℃),系统自动加载热膨胀补偿算法(例如高温下弹性体径向膨胀系数1.2×10⁻⁵/℃);地脚调整:根据设备生成的调整方案操作,例如电机前地脚需增加0.2mm垫片、后地脚减少0.1mm垫片,调整时采用“对角紧固”原则(避**侧受力导致弹性体形变),每调整一次复核软脚状态(防止垫片变化引发新软脚)。2.精度验证与迭代优化静态复核:调整后重新执行12/3/6点测量,确保残余偏差符合标准(如API610规定离心泵柔性联轴器平行偏差≤0.05mm/m,HOJOLO校准后可控制在0.02mm/m以内);动态验证:装复联轴器螺栓(按对角线分次拧紧,扭矩符合手册要求,如M16螺栓扭矩45-50N・m),启动设备空载运行30分钟,用HOJOLO的振动监测模块(部分型号集成)检测振动速度,需满足ISO10816-3标准:柔性联轴器机组振动速度≤4.5mm/s(例如某破碎机校准后振动从12mm/s降至3.8mm/s)。专业激光联轴器对中仪电话
与激光联轴器对中仪相关的文章
国产激光联轴器对中仪装置
- 马达激光联轴器对中仪维修 2026-05-04
- S和M激光联轴器对中仪演示 2026-05-04
- ASHOOTER激光联轴器对中仪校准规范 2026-05-03
- 设备激光联轴器对中仪哪里买 2026-05-03
- 昆山激光联轴器对中仪制造商 2026-05-03
- 租用激光联轴器对中仪装置 2026-05-02
- 进口激光联轴器对中仪保养 2026-05-02
- 振动激光联轴器对中仪使用方法图解 2026-05-02
- 爱司激光联轴器对中仪的作用 2026-05-02
- 租用激光联轴器对中仪的作用 2026-05-02
- 基础款激光联轴器对中仪制造商 2026-05-02
- 国内激光联轴器对中仪保修 2026-05-02
与激光联轴器对中仪相关的产品



与激光联轴器对中仪相关的新闻
-
多功能激光联轴器对中仪用途 2026-05-01 09:03:39激光联轴器对中仪的动态补偿技术,是通过多传感数据融合、实时算法修正、工况模型适配三大**机制,抵消设备运行中振动、温度变化、安装偏差等动态干扰,维持校准精度的稳定性。以HOJOLOAS500等**型号为例,其技术原理可拆解为“干扰感知-数据处理-偏差修正”的全流程闭环,具体工作机制如下:一、...
-
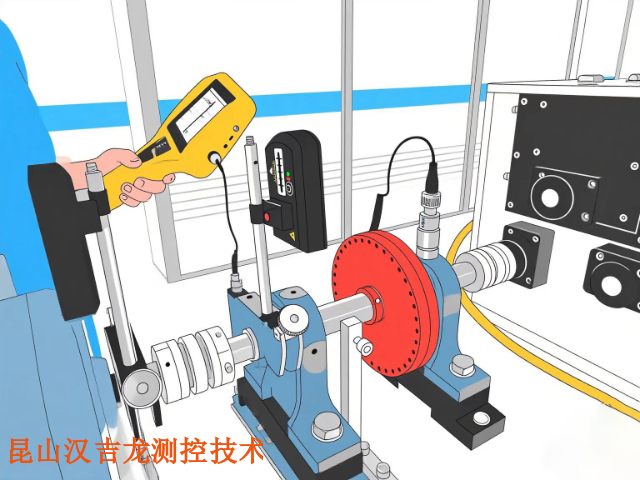
三合一激光联轴器对中仪特点 2026-05-01 09:03:39以柔性联轴器校准为例,实时数据验证的操作步骤通常包括:安装与初始校准:将激光发射器、探测器分别固定在电机轴与泵轴上,确保与轴同心,激光束投射至探测器中心后,系统自动采集初始偏差数据并显示在屏幕上。动态调整与数据监测:根据屏幕提示调整设备地脚(如增减垫片、左右平移),过程中实时观察径向/轴向偏差值变化...
-
ASHOOTER激光联轴器对中仪哪里买 2026-05-01 23:04:03短时间内(如10分钟内连续测量)数据波动主要源于三类干扰,其影响程度与控制方法如下:1.仪器自身稳定性光学系统漂移:单激光机型因光束发散角(通常0.1mrad)导致长距离(≥3m)测量时,光斑偏移可能达0.003mm/米,而双激光机型通过交叉验证可将漂移量控制在0.001mm/米内;电子元件噪声:探...
-
HOJOLO激光联轴器对中仪厂家 2026-05-01 01:03:30**技术的差异根源精度差异的**在于硬件配置与算法设计的层级化:激光技术方案:**型号采用双激光束实时补偿技术,可抵消振动、温度漂移导致的偏差;而基础型号可能*配置单激光源,受光束发散角和探测器尺寸限制,长距离测量时误差累积更明显。传感器与算法:AS500等**型号集成数字倾角仪和动态补偿算法,能自...
与激光联轴器对中仪相关的问题
新闻资讯
产品推荐
-
昆山无线激光对中仪连接
2026-05-04 -

马达激光联轴器对中仪维修
2026-05-04 -

昆山法兰联轴器对中仪怎么用
2026-05-04 -

国产对中仪贴牌
2026-05-04 -

S和M激光联轴器对中仪演示
2026-05-04 -

马达对中仪厂家
2026-05-04 -

国产对中仪哪里买
2026-05-04 -
联轴器不对中测量仪激光
2026-05-03 -

激光对中仪定做
2026-05-03