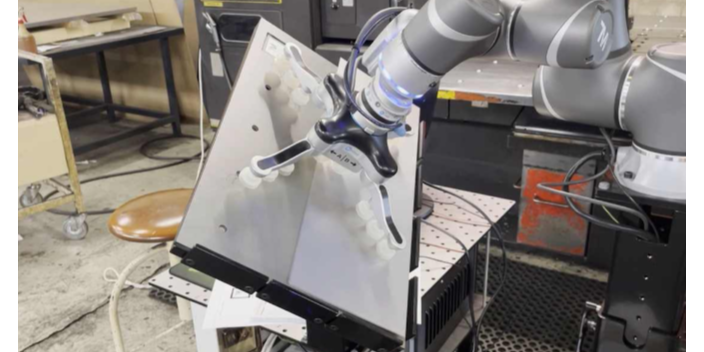
达明机器人移动上下料平台方案,采用移动上下料的方式,代替人工作业。轻量化设计,机器人自重负载比低,移动方便。机器人采用100~240V交流供电,或者22~60V直流供电,功耗300W,供电非常方便。同时达明特有的Landmark标签贴付在CNC设备上。手臂末端相机只需要看一眼,就可以快速补偿移动上下料平台的高度,角度,倾斜度的误差。并立即开始作业。利用协作机器人代替人工作业数控机床上下料,操作安全、简便、提高工作效率的同时,也能改善工人的工作环境。达明机器人,就选达明机器人(上海)有限公司。深圳抛光打磨达明机器人机构

达明机器人Robot+3DVision+2DVision“手眼”结合,做料箱混料3D分拣定位取料和2D定位Tray供料的功能展示,采用TMETH3D视觉,从混装料箱内分拣定位并采用手臂取料,并将其放入由2DVision定位的不同Tray内。因2D相机只能获取平面二维的图像信息,因此,当视觉任务中涉及到高度、厚度、深度的三维变化时,2D就较难辨识及准确度较差,而TM3Dvision技术能在很大程度上帮助使用者弥补2D视觉在视觉辨识上的不足,是达明机器人3D视觉具备“手眼”软硬一体化的特色体现,并可支援ETH、EIH两种相机安装方式,弹性灵活,整合简单,操作更方便。辽宁电子件组装达明机器人推荐达明机器人(上海)有限公司为您提供达明机器人,有想法可以来我司!

除了原有的协作机器人系列之外,达明机器人表示:我们不断研发整体解决方案,协助企业跨越自动化瓶颈,缩短与智能制造的距离,如同这次推出的焊接机器人范例─TMWeldingoperator。达明机器人专属的焊接应用界面,帮助使用者应对不同形状工件的焊接需求,并可与市面上常见的焊接设备如Panasonic350VZ1焊接机兼容,并直接透过手臂的操作界面来控制,可提供给中国台湾及海内外系统整合商,使用达明机器人开发更多的焊接应用的可能性。
达明机器人智能码垛解决方案(TMPalletizingOperator)是一款可快速使用的码垛专属作业单元,内含应用导向软体,通过软件事先进行堆栈模拟与碰撞侦测,协助使用者轻松设置堆栈规格,将以往需要2-3个月的整合时间缩短至5分钟,缩短了设计时间及人力成本,确保用户快速开工。为满足更大、更重的应用需求,达明机器人新推出负载高达20公斤的TM20,进一步扩展机器人自动化的范畴。专为大量取放、重型机器管理以及大容量的包装和堆栈所设计,适用于多种应用及大部分产业。为满足更大、更重的应用需求,达明机器人新推出负载高达20公斤的TM20,进一步扩展机器人自动化的范畴。专为大量取放、重型机器管理以及大容量的包装和堆栈所设计,适用于多种应用及大部分产业。达明机器人(上海)有限公司为您提供达明机器人,期待您的光临!

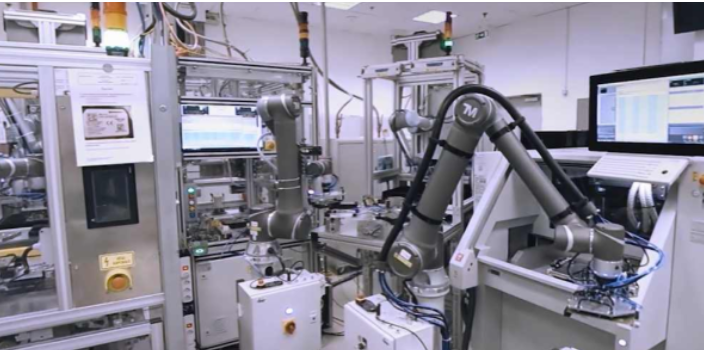
达明机器人作为全球协作型机器人和智能视觉系统先驱,针对AGV/AMR搭配的复合机器人应用场景推出直流电源版本的手臂(M系列),透过TM特有的Landmark及TMvision视觉系统建立动态相对坐标体系并实现跨手臂点位共享,弥补AMR行走的运动偏差并精细定位、平稳取放,非常适用于医疗及半导体行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性高、精度高的应用。作为一家专注于研发制造AI协作型机器人与工业自动化解决方案的领导厂商,达明机器人凭借内建视觉及TMlandmark等技术为全球各区域市场提供具备先进技术的产品及实时在地化服务,并成功应用于3C、汽车及零配件、半导体、机加工、食品、家电、服务等行业。达明机器人(上海)有限公司为您提供达明机器人,有想法的可以来电!辽宁电子件组装达明机器人推荐
达明机器人(上海)有限公司达明机器人值得用户放心。深圳抛光打磨达明机器人机构
达明机器人作为全球协作型机器人和智能视觉系统先驱,致力于研发和应用自动化科技,以创新的自带智能视觉结合手臂,加上AI+人工智能系统,手眼脑合一,提升机器人能力、弹性与易用度,协助企业大幅降低导入自动化人力与时间成本。同时针对AGV/AMR搭配的复合机器人应用场景推出直流电源版本的手臂(M系列),透过TM特有的Landmark及TMvision视觉系统建立动态相对坐标体系并实现跨手臂点位共享,弥补AMR行走的运动偏差并精细定位、平稳取放,非常适用于医疗及半导体行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性高、精度高的应用。深圳抛光打磨达明机器人机构