激光雷达是一种基于激光脉冲和接收回波信号的高精度感知技术。它以瞬间的速度和精细的数据采集,突破了传统传感器的限制,实现对环境的多方位探测与识别。无论是自动驾驶、智能机器人,还是智慧城市、工业制造等领域,激光雷达都扮演着不可或缺的角色。激光雷达的工作原理简单却高效。通过发射激光束并接收回波信号,它能够...
激光雷达基本参数
- 品牌
- 慧视科技
- 型号
- 可定制
激光雷达企业商机
经过处理便可得到具有坐标信息的影像数据。利用激光进行三维建筑建模的技术。首先,进行数据预处理。就是结合IMUU记录的姿势参数、机载GPS数据、地面基站GPS观察数据、GPS偏心分量、扫描仪和数码相机各自的偏心分量,进行GPS/IMU联合解算,得到扫描仪及相机曝光坐标下的轨迹文件,进而得到外方为元素。其次,使用LIDAR数据商业处理软件将地面数据与非地面数据分离,生成DEM,在利用纯地表数据对影像外方位元素通过寻找同名像点的方式进行校正快速生成DOM。对于成像激光雷达来说,系统还需要解决图像行的非线性扫描修正、幅度/距离图像显示等技术。贵阳32线激光雷达结构

过去,由于需要采用机器学习来训练模型识别物体,摄像头 即使有大量数据也难以避免边角案例。毫米波雷达分辨率较差,通常在 算法上会过滤相对于路面不移动的雷达回波,以保证车辆在遇到隧道洞、 路牌等情况下能正常行驶,但遇到白色卡车横在道路中间的极端案例会 导致相机和毫米波雷达双双失效造成事故。不同于摄像头 需要训练模型,激光雷达在面对未知物品时至少能够给予安全范围指导, 所以 L2+级别的辅助驾驶配备激光雷达不仅极大提升驾驶安全性, 保障驾驶员和乘客的安全,更能收集实时数据为 L3 打下基础。硬件预 埋和后续 OTA 远程升级是当下整车厂的常用方式。贵阳32线激光雷达结构激光光速发散角小,能量集中,探测灵敏度和分辨率高。

激光雷达自诞生以来经历了五个发展阶段:(1)1960 年代-1970 年代:激光器 诞生,基于激光的探测技术开始发展,这一时期激光雷达主要用于科研及测绘, 1971 年阿波罗 15 号载人登月任务使用激光雷达对月球表面进行测绘。(2)1980 年代-1990 年代:激光雷达商业化起步,开始用于工业探测和早期无人驾驶项目, 这一时期西克和北洋等厂商推出单线扫描式 2D 激光雷达产品。(3)2000 年代2010 年代早期:高线数激光雷达开始用于无人驾驶的避障和导航,激光雷达主 要应用于无人驾驶测试项目等。此时市场内主要为国外厂商。(4)2016 年-2018 年:国内厂商入局,激光雷达技术方案多样化发展。此时激光雷达主要用于无人 驾驶、高级辅助驾驶、服务机器人等,且下游开始有商用化项目落地。(5)2019 年至今:市场发展迅速,产品性能持续优化,应用领域持续拓展。激光雷达技术 朝向芯片化、阵列化发展。境外激光雷达公司迎来上市热潮,同时有巨头公司加 入激光雷达市场竞争。
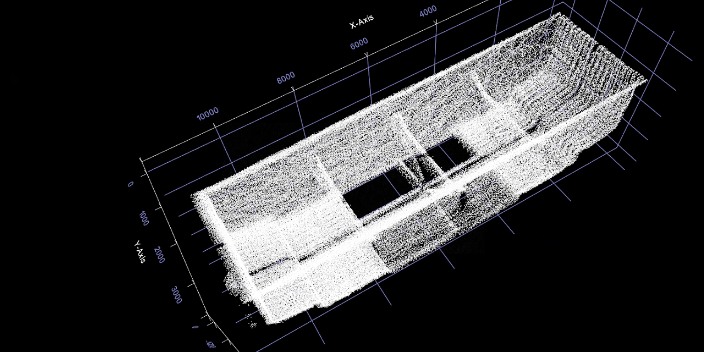
激光雷达技术在城市三维建筑模型中的应用,“数字城市”是数字地球技术系统的重要组成部分,而表达城市主要物体的三维模型包括三维地形,三维建筑模型、三维管线模型。这些三维建筑模型是数字城市重要的基础信息之一。而激光雷达技术可以快速完成三维空间数据采集,它的优点使它有很广阔的应用前景。机载雷达系统的组成包括:激光扫描器、高精度惯性导航仪、应用查分技术的全球定位系统、高分辨率数码相机。通过这四种技术的集成可以快速的完成地面三维空间地理信息的采集然后以高重复频率将这两种波长的光交替发射到大气中。

可以通过反射信号和发射信号的频率是否相同判断物体是否处于静止状态。对于逐渐靠近的物体,返回信号会产生正向多普勒频移,对于逐渐远离的物体,返回信号会产生反向多普勒频移,导致频率发生上移或下移并由此区分物体移动方向。目前TOF为市场中**为成熟的激光雷达测距方式,也是商业化激光雷达应用多的测距方式。通过监测激光发射与回波的时间差,基于光速和测量时间差计算目标距离。TOF的比较大优势在于探测精确、性价比高、技术成熟、响应速度快。缺陷是需要算法抗干扰,并根据反射率判断是否为伪目标,所以对算法有较高的要求。FMCW可以根据多普勒效应判断目标移动方向,信息更丰富且对环境强光和其他激光具有很好的抗干扰性能。总体来看测距方式未来将从TOF逐渐向FMCW切换,且两种测距方式将会在不同场景存留。激光雷达技术可应用于城市三维建筑模型中。昆明车载激光雷达市场
激光雷达的波长比微波短好几个数量级,又有更窄的波束。贵阳32线激光雷达结构
激光雷达是结合了光学、电子、机械、软件、芯片、器件等技术,可以进行环境 探测、数据处理和传输的智能传感器。激光雷达由发射系统、接收系统、信息处 理系统和扫描系统组成。发射系统中的激励源周期性地驱动激光器,发射激光脉 冲,激光调制器通过光束控制器控制发射激光的方向和线数,通过发射光学系统,将激光发射至目标物体;经接收光学系统,光电探测器接收目标物体反射 回来的激光,产生接收信号;接收信号经过放大处理和模数转换,经由信息处理 模块计算,获取目标表面形态、物理属性等特性,然后建立物体模型。扫描系统 对所在的平面扫描,并产生实时的平面图信息。贵阳32线激光雷达结构
成都慧视光电技术有限公司是一家成都慧视光电技术有限责任公司是一家立足于新技术研发的高新技术企业,具有完全自主知识产权,其团队由在图像处理与人工智能领域沉淀了近十年的人员组成,主营行业:追踪板卡类、激光雷达类、红外测温类整机及模组、观瞄类整机、行业AI解决方案、通信传输类产品及方案!的公司,致力于发展为创新务实、诚实可信的企业。公司自创立以来,投身于电子元器件,光电子器件,通讯设备,仪器仪表,是通信产品的主力军。慧视光电始终以本分踏实的精神和必胜的信念,影响并带动团队取得成功。慧视光电始终关注自身,在风云变化的时代,对自身的建设毫不懈怠,高度的专注与执着使慧视光电在行业的从容而自信。
与激光雷达相关的文章

贵州三位测绘激光雷达数据
- 汽车激光雷达数据 2024-04-18
- 西藏大角度测量激光雷达 2024-04-18
- 昆明32线激光雷达公司 2024-04-18
- 贵州多线激光雷达点云 2024-04-18
- 四川激光雷达推荐 2024-04-18
- 西藏轨道交通激光雷达 2024-04-18
- 固态激光雷达结构 2024-04-17
- 四川固态面阵激光雷达数据 2024-04-17
- 成都多线激光雷达结构 2024-04-17
- 四川轨道交通激光雷达测距 2024-04-16
- 四川车载激光雷达电子狗 2024-04-16
- 成都3D激光雷达电子狗 2024-04-16
与激光雷达相关的产品


与激光雷达相关的新闻
-
250m激光雷达数据处理 2024-04-14 02:02:15激光雷达的应用具有多样性和灵活性。随着科学技术的进步和创新的推动,激光雷达有望在更多领域发挥作用,带来更多令人惊喜的应用。激光雷达可以用于研究和开发隐形材料。通过对材料表面的激光反射进行分析,激光雷达可以帮助科学家了解和改善材料的折射和反射性能,从而实现对光的隐身和干扰的控制。激光雷达在深海探测中有...
-
西藏大角度测量激光雷达电机 2024-04-14 19:02:04激光雷达在我们的生活工作中有着很多应用。例如,激光雷达被用于舞台演出和展览中的视觉创造。通过精确定位和探测,激光雷达可以在舞台上实现令人惊叹的光影效果,为观众带来视觉上的震撼和体验。激光雷达在文物保护和文化遗产重建中扮演重要角色。它可以快速而精确地获取古建筑、雕塑和艺术品的三维点云数据,为文物保护和...
-
32线激光雷达产品 2024-04-13 04:02:46在采矿车运输场景中,此种方法原理类似,也能达到安全运输管理的目的。成都慧视自研的三维激光雷达HSLi-H20是专为轨道交通监控自主研发的一款激光雷达。具有探测范围宽、分辨率高、响应速度快、点云密集、环境耐受性高等杰出优点,摆脱了现有市场上探测分辨率、扫描速度等技术参数不满足实际需求指标、性价比不高等...
-
西藏激光雷达测绘 2024-04-13 05:02:35在安防领域,激光雷达能够实现目标区域的异物入侵监测。例如在火车站站台,需要乘客远离轨道1米以上,但是许多乘客容易疏忽大意,就容易出现危险,将激光雷达安装在车站月台,就能够辅助进行安全距离的报警监测。在智慧停车领域,激光雷达能够辅助进行停车,检测车辆移动状态,控制车辆与物体之间的距离。在建模领域,激光...
与激光雷达相关的问题
新闻资讯
产品推荐
-
哪些目标检测生产企业
2026-05-13 -
山东工业目标检测销售厂家
2026-05-13 -

哪里有目标跟踪解决
2026-05-12 -

吉林智能化目标检测经验丰富
2026-05-12 -
安徽多目标检测
2026-05-12 -
新疆无源目标检测
2026-05-12 -

智能化目标检测推荐厂家
2026-05-12 -

青海靠谱的目标检测
2026-05-12 -
四川网络目标检测
2026-05-12