智能驾驶汽车电子测试模组需具备多传感器仿真能力,其视觉仿真模块可输出 LVDS 格式的虚拟摄像头信号,帧率达 60fps,分辨率支持 1920×1080;雷达仿真模块能生成点云数据,模拟不同距离、速度的目标物;激光雷达仿真则可提供百万点级的 3D 点云,模拟雨、雾等天气对传感器的影响。传感器数据同步精度控制在 1ms 以内,确保多传感器融合算法的测试有效性。通过与场景引擎(如 Prescan)对接,模组可复现海量真实交通场景,从各方面验证自动驾驶系统的感知与决策能力。汽车电子测试转接头的材质兼容性,需与汽车电子接口金属成分匹配防腐蚀。东莞智能汽车电子适配方案
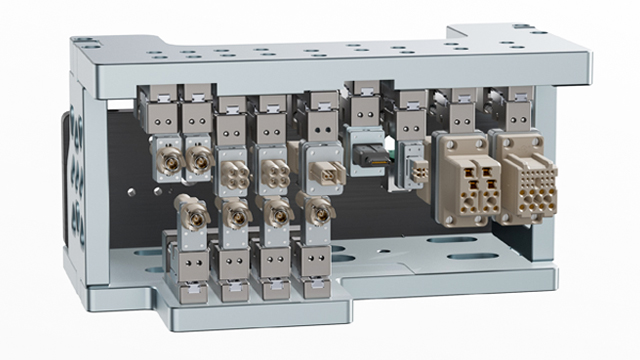
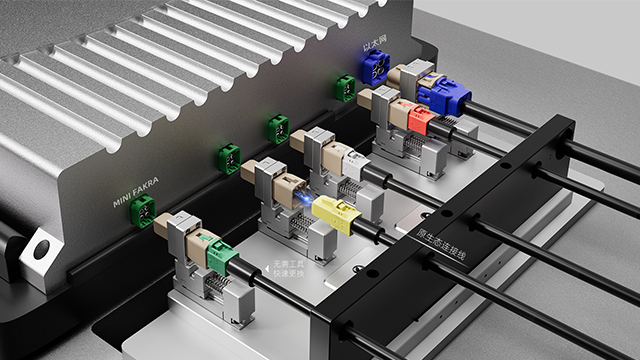
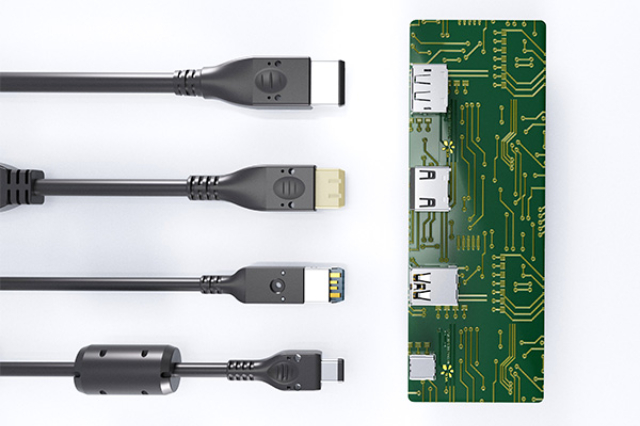
高精度汽车电子测试转接头是实现车载电子系统参数精确测量的基础。其阻抗匹配设计需与被测汽车电子部件的特性阻抗(通常为 50Ω 或 75Ω)保持一致,在 1MHz 至 1GHz 的频率范围内,反射损耗需优于 - 20dB,避免信号反射导致的测量误差。对于自动驾驶系统的毫米波雷达测试,专门的转接头需支持 77GHz 的高频信号传输,插入损耗控制在 0.5dB 以内,确保雷达信号的相位与幅度测量精度。在激光雷达(LiDAR)测试中,转接头的时延误差需小于 1ns,以满足距离测量的高精度要求,为汽车电子传感器的性能验证提供准确的连接通道。珠海高效率汽车电子自动化测试屏蔽层设计的汽车电子测试转接头,有效抗干扰,确保汽车电子信号纯净。
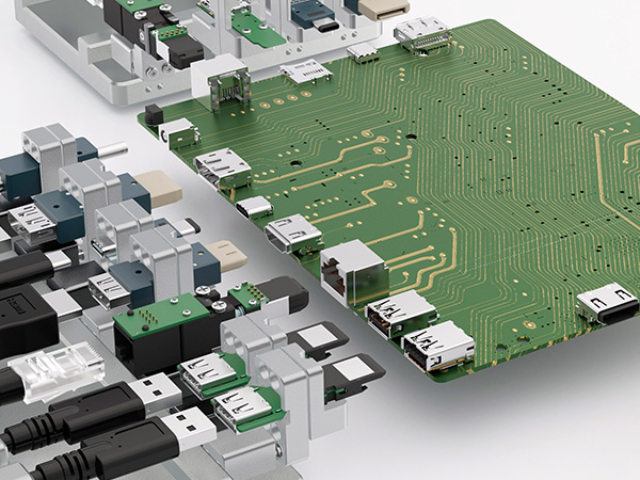
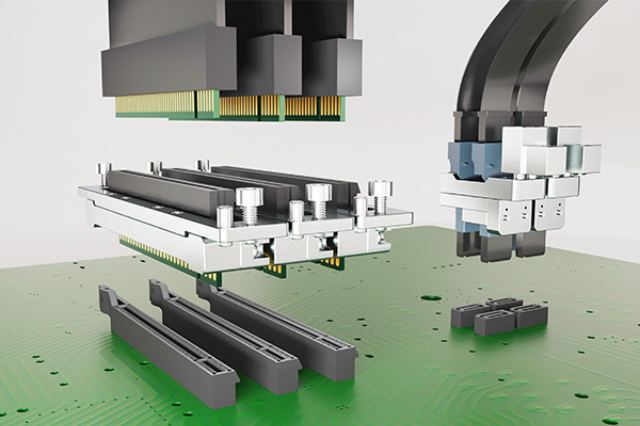
汽车电子测试转接头的材料选择需平衡电气性能与机械特性。接触件通常采用高导电率的铍铜或磷青铜,经时效处理后硬度可达 HV180 以上,确保长期插拔后的弹性稳定性。绝缘材料优先选用 PPS 或 PEEK,这些材料在 150℃下仍能保持优良的绝缘性能(体积电阻率 > 10¹⁴Ω・cm),且耐化学腐蚀性强,可抵御汽车电子测试中可能接触的冷却液、润滑油等介质。屏蔽层材料则采用紫铜带或镀锡铜网,兼顾屏蔽效果与柔韧性。材料的兼容性验证至关重要,需确保不同材料间不会发生电化学腐蚀,尤其是在高温高湿环境下,避免接触电阻异常升高。
汽车电子测试模组的实时性是验证控制系统动态性能的基础,其硬件定时精度达 100ns,软件任务调度周期可低至 1ms。在动力总成控制测试中,模组能精确同步采集曲轴位置信号与喷油控制信号,时间偏差小于 50μs;在底盘电子测试中,可模拟路面附着系数突变,验证 ESC 系统的响应时间。实时操作系统(RTOS)的采用确保了测试任务的确定性执行,避免多任务调度导致的时间抖动。通过与硬件在环(HIL)系统集成,测试模组可构建高保真的虚拟测试环境,复现车辆在各种工况下的动态响应。低功耗汽车电子测试转接头,适合汽车电子待机状态下的功耗检测场景。
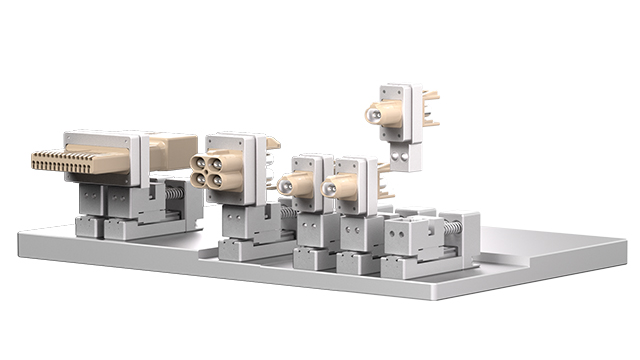
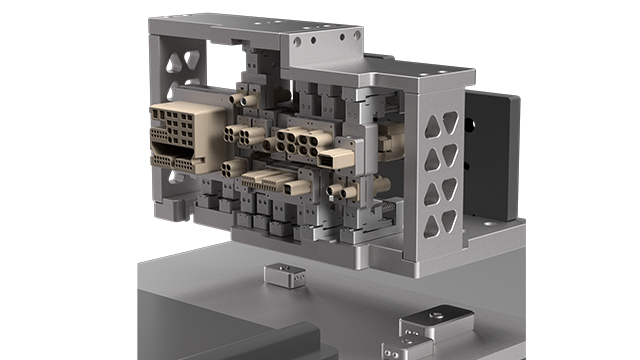
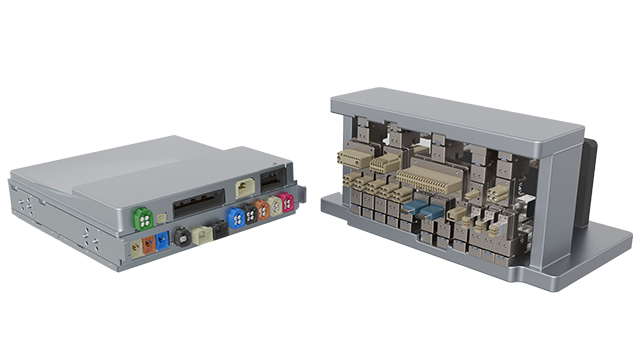
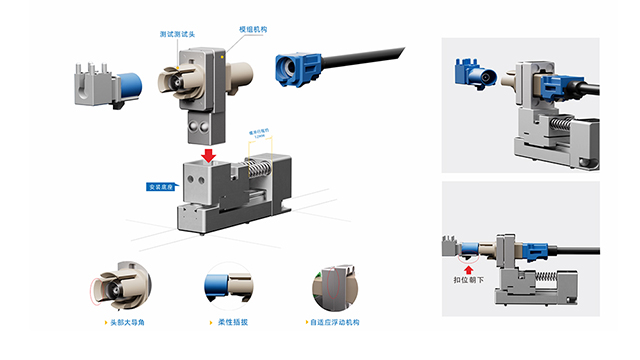
汽车电子测试转接头的机械结构设计直接影响测试效率与接口寿命。现代转接头普遍采用模块化架构,通过更换不同插头模块适配 OBD-II、Deutsch、AMP 等主流汽车电子接口标准。导向定位结构确保插拔时的同轴度误差不超过 0.1mm,减少对车载电子接口的磨损。快速锁紧机构可实现单手操作,插拔力控制在 30-50N 之间,既便于操作又能防止意外脱落。在振动测试环境中,转接头需通过 10-2000Hz 的随机振动验证,振幅不超过 0.75mm,确保在模拟车辆行驶的振动条件下保持稳定连接,为汽车电子的可靠性测试提供机械基础。磁性汽车电子测试转接头,实现快速定位连接,提升汽车电子测试效率。标准化汽车电子测试设备
高频汽车电子测试转接头,支持汽车电子毫米波雷达等高速信号的测试需求。东莞智能汽车电子适配方案
汽车电子测试模组的 OTA 测试功能验证车载系统的远程升级能力,支持 HTTP、MQTT 等 OTA 通信协议,可模拟不同网络环境(3G/4G/5G)的带宽与延迟特性。模组能生成符合 UDSonIP 标准的诊断消息,测试 ECU 的软件下载、校验、安装流程。在压力测试中,可模拟 thousands of vehicles 同时进行 OTA 升级的场景,验证服务器的负载能力与 ECU 的升级稳定性。升级过程中的断点续传、版本回滚等功能也可通过模组进行各方面验证,确保汽车电子测试模组的 OTA 功能的可靠性。东莞智能汽车电子适配方案