360度全景影像是一项工程车安全配置,与普通倒车影像系统相比,其中心在于在车头、车侧增加了多个摄像头,通过车载显示屏幕可观看工程车四周360度全景融合,超宽视角,无缝拼接的适时图像信息(鸟瞰图像),了解车辆周边视线盲区,帮助工程车驾驶员更为直观、更为安全地停泊车辆。原理:景物通过镜头生成的光学图像投射到图像传感器表面上,然后转为电信号,经过模数转换装置转换后变为数字图像信号,再送到数字信号处理芯片中加工处理,之后通过USB接口回传给图像处理单元。在图像处理单元中,电脑将对它们进行变形、拼接处理,从而形成一张从车顶鸟瞰的俯视图。这样独特的视角可以很好地帮助缺乏车感的驾驶员去理解自己的走向和位置。工程车360度全景系统能够帮助车主们轻松简单的斜位泊车。挖掘机360环影系统雷达预警
工程车360度全景影像系统是由精拓公司研发,通过安装在车身前后左右的4个广角摄像头,同时采集车辆四周的影像,经过图像处理单元矫正和拼接后,形成一幅车辆四周的360度全景俯视图,实时传送到中控台的显示设备上。行车辅助系统通过安装在车身前后左右的4个广角摄像头,同时采集车辆四周的影像,经过图像处理单元矫正和拼接后,形成一幅车辆四周的360度全景俯视图,实时传送到中控台的显示设备上。通过360度全视界鸟瞰全景行车辅助系统,驾驶员坐在车中即可直观地看到车辆所处的位置以及车辆周围的障碍物,从容操控车辆泊车入位或通过复杂路面,有效减少刮蹭、碰撞、陷落等事故的发生。叉车360度全景影像系统定制工程车360度全景系统可以帮助工程车驾驶员更为直观的停泊车辆。

360度全景环视系统的产生背景:随着图像和计算机视觉技术的快速发展,越来越多的技术被应用到工程车电子领域,传统的基于图像的倒车影像系统只在车尾安装摄像头,只可以覆盖车尾周围有限的区域,而车辆周围和车头的盲区无疑增加了安全驾驶的隐患,在狭隘拥堵的市区和停车场容易出现碰撞和刮蹭事件。为扩大驾驶员视野,就必须可以感知360度°各处的环境,这就需要多个视觉传感器的相互协同配合作用然后通过视频合成处理,形成全车周围的一整套的视频图像,就是有这类需求,全景视觉泊车辅助系统应运而生。
工程车360度全景影像系统功能:通过两边的侧视摄像头,轻易判断车身两边的物体与车之间的距离,可以避免擦碰,顺利通过复杂路面,当停车位置前后障碍物位置很低,没有雷达或雷达不可以探测时,通过中控台的前后图像就可以轻易判断车的前后和障碍物的距离,当车行驶至交叉路口时,可以通过中控台看到前方或后方180度范围图像,从而轻易判断汇车情形,当车直行时,可以直接打开前视的摄像头,如果车子发生偏离直行线路时,驾驶者就可以通过中控台很直接的发现,并进行及时修正。工程车360全景系统的电源模块抗干扰强,适应不同车型。

工程车360度全景监控系统的特点:360度°全景监控系统可通过位于车头、两侧和车尾的四个广角摄像头监控车身周边状态,为驾驶者提供360度°全景影像,从而去除一切视线盲区。车主可以体验到眼观八方的全新驾驶感受。DVD画面和工程车四个摄像头画面,通过正常开车操作挂倒档、打转向灯或转向拨杆进行自由切换。当在夜间使用大灯时。则需按双闪灯触发系统进入基本模式。行车全程监控记录存储,较大支持32G容量的SD卡,该系统给复杂环境行车、泊车带来极大帮助。车主可直观了解到工程车周围环境,避免发生碰撞。工程车360度全景系统的固态存储的稳定性高达99%。矿车360全景环视系统方案
工程车360度全景系统能够帮助车主们轻松简单的正位泊车。挖掘机360环影系统雷达预警
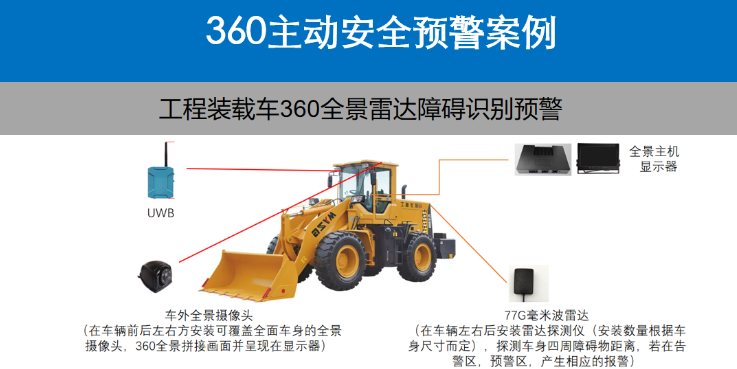
工程车360度全景摄像头、工程车360度全景影像系统、工程车360度全景泊车系统、工程车360度全景可视系统、工程车360度全景倒车影像系统,通过安装在车身前后左右的4个超广角摄像头,同时采集车辆四周的影像,经过精拓专有的“实时图像畸变还原对接技术”对图像进行畸变还原—视角转化—图像拼接—图像增强等处理,较终形成一幅无缝完整的车周全景鸟瞰图。该系统不但可以显示全景图,还可同时显示任一方向的单视图;工程车驾驶员通过配合标尺线可以准确读出障碍物的位置和距离。挖掘机360环影系统雷达预警