工程车更加适合安装车侣360全景影像系统的原因主要有以下几点:工程车的工作环境通常比较复杂,如在城市道路、高速公路、野外、工地等,驾驶环境多变,对驾驶安全的要求也比较高。因此,通过安装360全景影像系统,可以提供更加四周、准确的车辆周围环境信息,帮助驾驶员更好地了解环境,避免事故。工程车的车身通常比较大,驾驶室比较高,存在一定的盲区。安装360全景影像系统可以消除盲区,提供更加四周的视野,帮助驾驶员更好地操控车辆。工程车在行驶过程中需要频繁地进行变道、转弯、掉头等操作,对驾驶员的驾驶技能要求比较高。通过安装360全景影像系统,可以帮助驾驶员更加准确地判断车辆周围的环境,提高驾驶技能,减少事故。工程车通常需要进行一些特殊的作业,如装载、卸载、挖掘等,对车辆的稳定性要求比较高。通过安装360全景影像系统,可以帮助驾驶员更加准确地掌握车辆的位置和姿态,保证作业的准确性和安全性。综上所述,工程车非常适合安装360全景影像系统,可以提高驾驶安全性和效率,减少事故发生的概率。 车侣工程车360全景影像系统 远程监控和操作,减少现场风险。升降机360全景环视系统预警
车侣工程车360影像系统与普通车上用的360全景影像存在以下区别:应用范围不同:普通360全景影像主要是为了帮助汽车驾驶员更为直观、安全地停泊车辆,而工程车360影像系统不仅适用于停泊车辆,更重要的是在车辆行驶和作业过程中提供全可视的视觉辅助,例如在道路施工、现场勘查、装卸货物等场景能不同:普通360全景影像系统集成了360度全景影像、泊车辅助预警、行车记录仪等功能,主要作用是辅助汽车驾驶员更为直观、安全地停泊车辆。而工程车360影像系统在此基础上还增加了实时监控、盲区监测、驾驶员行为分析等功能,旨在实现全可视的视觉辅助,提高驾驶安全性和工作效率。总之,工程车360影像系统相对于普通车上用的360全景影像具有更广泛的应用范围和更丰富的功能,能够为工程车驾驶员提供更加四周和可靠的视觉辅助。 升降机8路360全景生产厂家车侣工程车360全景影像系统,可以对设备进行全FW的检查和录像。

在工矿特殊场景下使用工程车360度全景影像系统时,需要注意以下事项:1抗干扰能力:工矿特殊场景常常存在噪音、灰尘、振动等干扰因素。确保工程车360度全景影像系统具备良好的抗干扰能力,可以正常工作并提供清晰的影像。防尘防水:由于工矿特殊场景通常存在粉尘和潮湿环境,工程车360度全景影像系统需要具备防尘和防水性能,以保证系统的长期稳定运行。视角覆盖:在工程车360度全景影像系统的配置上,应确保影像摄像头的位置和角度能够提供的视角覆盖,包括车辆周围、车身上方、下方等区域,以便驾驶员感知周围环境。4.强光适应:工矿特殊场景常有大量强光照射,例如灯光、反光等。工程车360度全景影像系统需要具备良好的强光适应能力,避免过曝或反差过高的情况影响影像质量。报警和预警功能:在工程车360度全景影像系统中,应该配备相应的报警和预警功能。例如,当检测到人员或障碍物靠近车辆时,系统能够及时报警提醒驾驶员,提高安全性能。6.可靠性和稳定性:由于工矿特殊场景常常存在恶劣的工况和度使用,工程车360度全景影像系统需要具备较高的可靠性和稳定性,以适应长时间工作和剧烈振动的要求。
工程车360影像和倒车影像的优缺点:倒车影像:优点:能够比较直观的看到车后的情况,车尾情况一览无余。缺点:虽然能看到汽车后方的情况,但是显示距离比较抽象,无法准确的判断后方障碍物的距离,可视范围只是车后。360全景影像:优点:车身前后左右都能看到,车身四周的情况一目了然,可视范围是四周的。缺点:价格比较的贵,便宜的清晰度不高,贵的又太贵,有盲区,显示面面有扭曲变形现象,需要更改原车线路,对以后维修保养有影响。车侣工程车360全景影像系统多种显示模式,满足不同操作需求。
工程车司机在使用360度全景影像系统时需要注意以下事项:在使用全景影像系统之前,确保系统已经正确安装和校准,以确保影像的准确性和清晰度。在行驶过程中,不要过度依赖全景影像系统,仍然需要保持对周围环境的观察和注意力集中在道路上。全景影像系统可以提供更广阔的视野,但仍然可能存在盲区。因此,在变道、并线或倒车时,仍然需要通过后视镜和侧视镜来确认周围的情况。如果发现全景影像系统出现故障或显示异常,应及时联系相关维修人员进行检查和修复。在停车时,全景影像系统可以提供更好的视野,但仍然需要注意周围的行人和障碍物,以确保安全停车。在使用全景影像系统时,不要将注意力完全集中在屏幕上,仍然需要保持对道路和交通情况的关注。 精拓电子工程车360全景系统的选购需要考虑长时间运行是否流畅。压路车360全景可视系统方案
精拓电子工程车360全景系统有着完善的全景画面回放。升降机360全景环视系统预警
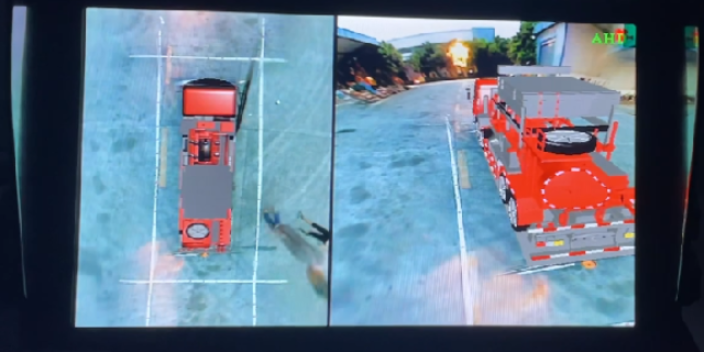
车侣工程车360全景影像系统能够提供相对精确的车辆周围环境感知,通过分布在车辆前后左右的四枚超广角镜头,分别采集各自所负责区域的实时影像,经过图像处理单元的畸变还原、视角转化和图像拼接等处理,终在中控屏幕上形成一个实时且完整的360度全景俯视鸟瞰图。这可以在很大程度上消除驾驶盲区,帮助驾驶员更加四周地了解车辆周围的环境,从而避免盲区和死角。然而,受限于镜头视角、画面拼接以及计算处理等环节的精度和准确性,系统的成像误差可能存在,但总体上可以提供相对精确的车辆周围环境感知。升降机360全景环视系统预警









