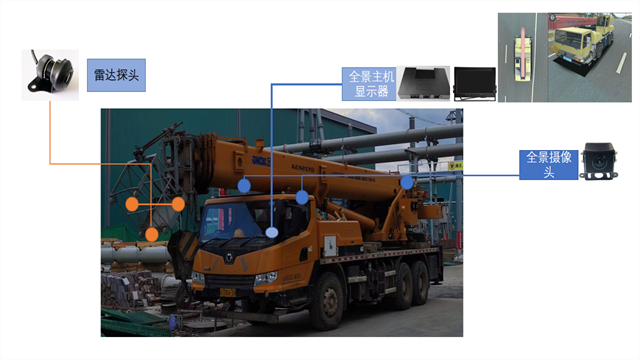
4G360全景影像系统集成毫米波雷达与疲劳驾驶预警系统在矿场上的应用,主要体现在以下几个方面:
一、360全景影像系统的应用:系统通过车辆前后左右安装高清广角摄像头,采集车身四周的高清实时画面,通过AI视觉拼接技术处理,形成车辆周边全景视图。系统具有BSD(盲区监测)功能,实时监测车身四周盲区内的行人、非机动车辆和障碍物,实施分级预警。通过车内屏幕与车外声光报警器提醒司机。4G后台功能远程实时监控车辆四周的影像,了解车辆当前的位置、行驶状态以及周围环境。
二、毫米波雷达的应用:毫米波雷达具有很高的探测精确度、分辨率和穿透力,在复杂环境下(如矿尘、烟雾等)精确探测出车辆周围的人员、设备和其他障碍物。实时监测和跟踪矿场内的车辆和人员。毫米波雷达能够迅速定位事故发生地点。矿场存在信号覆盖不全的问题,毫米波雷达通过反射地下信号,可以抑制信号干扰和传输时延,提高信号质量,改善通信情况。
三、疲劳驾驶预警系统的应用:系统基于先进的图像智能识别分析技术,实时检测驾驶员的头部运动、眼皮运动、眼睛闭合频率、凝视方向、打哈欠频率等面部信息,监控驾驶员的疲劳状态。当系统检测到驾驶员出现疲劳驾驶的迹象及时发出预警提醒避免事故。 主动安全预警系统车规级高性能处理器主机集成多种功能模块,如CPU,GPU,NPU等,支持多种高级驾驶辅助系统功能.江苏挂车主动安全预警系统开发平台
搅拌车安装4G带后台监控的360全景影像+雷达系统的应用效果显ZHU,主要体现在以下几个方面:
一、提升驾驶安全性消除盲区
系统通过车辆四周的多个高清摄像头,实时捕捉并拼接成车辆周围的全景图像提供无盲区的视野。雷达系统能够实时监测车辆周围的障碍物检测到有障碍物靠近时立即发出警报。
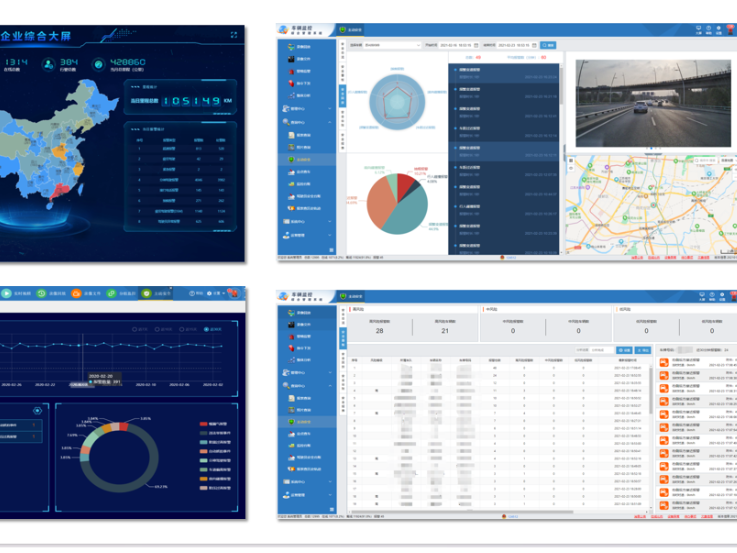
二、增强远程监控与管理
4G通信技术实时视频和数据即时传输到后台监控中心。电脑或移动设备远程查看搅拌车的运行状态、行驶轨迹、驾驶员行为等信息,实现远程监控和管理。后台系统收集并存储大量的行驶数据包括车速、油耗、行驶里程等。
三、方便操作与控制
系统提供实时的图像和视频,监控料斗、搅拌系统等重要部件的运转情况,及时做出调整和反应。系统能自动识别车位和障碍物,并提供精确的指导。
四、提高工作效率
通过全景影像和雷达系统的辅助,减少因视野受限或操作不当导致的操作时间延长。雷达系统在监测车辆周围环境的同时,实时分析路况和交通信息。
五、降低损失和维修成本
全景影像和雷达系统的实时监测与预警功能有效避免车辆碰撞和刮擦等事故的发生,减少车辆损坏和维修成本。部分系统还具备疲劳驾驶提醒功能,当检测到驾驶员疲劳时会自动发出警报避免因疲劳驾驶导致的事故。
广西4G通信主动安全预警系统厂家供应叉车专YONG4G智能一体机集成了车载视频监控,行车记录仪,DSM驾驶员状态分析系统,BSD盲区监控等功能于一体.

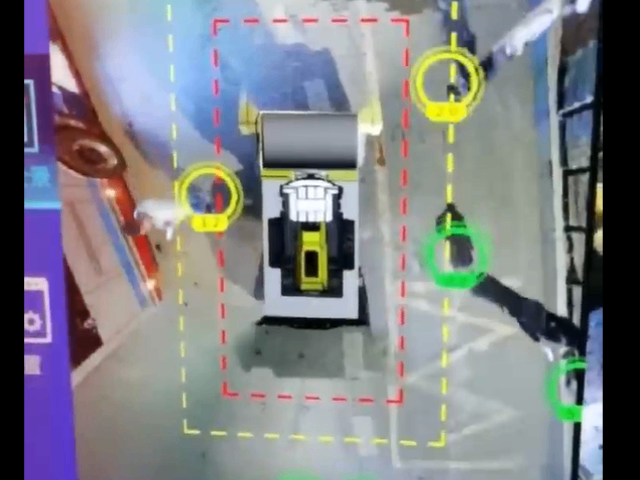
(上篇)4G 360全景影像网口视频流传输为工业机器人提供视觉盲区与远程操控解决方案,是一种结合了现代通信技术、图像处理技术和机器人技术的创新应用。以下是对该解决方案的详细阐述:
一、视觉盲区解决方案360全景影像系统:
系统构成:通过在工业机器人周围安装4个或更多超广角摄像头,这些摄像头能够覆盖机器人周围360度的视野范围。摄像头采集的高清实时画面通过AI视觉拼接技术处理,形成机器人周边的全景视图。实时显示:处理后的全景视图实时显示在操作人员的监控屏幕上,使操作人员能够清晰地看到机器人周围的每一个细节,包括原本难以察觉的盲区。智能监测:系统还具备智能监测功能,能够实时监测机器人周围盲区内的行人、非机动车辆和障碍物,并在检测到潜在风险时及时发出预警,确保作业安全。4G网络传输:高效传输:利用4G网络的高速传输特性,将360全景影像系统采集的视频数据实时传输到远程监控中心或操作人员的移动设备上。这种无线传输方式不仅方便快捷,而且能够跨越地理限制,实现远程监控和操控。稳定性与安全性:采用先进的加密技术和网络协议,确保视频数据在传输过程中的安全性和稳定性,防止数据泄露和非法访问。
(上篇)主动安全一体机主机的技术参数通常涵盖多个方面,包括硬件规格、输入输出接口、功耗、工作温度等。以下是根据参考文章整理的主动安全一体机主机的一些主要技术参数:1.硬件规格CPU:内核采用ARMCortex-A7双核,主频≥,部分高DUAN型号可能采用更强大的处理器,如第11代英特尔®酷睿™i5-11400。内存:通常配备1GB或更高容量的内存,以支持多任务处理和流畅运行。存储:内置8GBeMMC闪存或更高JI别的SSD硬盘,部分产品支持机械硬盘/SSD,ZUI大可达2T。显示:部分一体机配备触控一体屏,分辨率可达1920x720或更高,如1920*1080IPS,支持多通道同步音视频回放。2.输入输出接口视频输入:支持4路+(预留)2路AHD信号接入,部分产品支持高达6路1080P视频输入。视频输出:支持视频显示分辨率如1280x720,60fps,部分产品提供VGA或HDMI输出。音频:通常具备1通道录YIN和1通道回放功能。开关量检测:支持多路开关量输入和输出,如4路、11路输入,1路输出等。CAN接口:至少提供1路CAN。串口:预留1路TTL串口或更多。网络接口:支持4G全网通通信,部分产品预留GPS、北斗双模定WEI。USB接口:提供USB,用于数据传输和设备连接。毫米波雷达具有很高的探测精确度,分辨率和穿透力,在复杂环境精确探测出车辆周围的人员设备和其他障碍物.
(专辑一)主动安全预警中,毫米波雷达与超声波雷达在多个方面存在区别,体现在工作原理、性能特点、应用场景以及成本等方面。以下是对两者区别的详细分析:
一、工作原理
毫米波雷达:利用射频波段的电磁波进行工作,主要工作在毫米波频段(30-300 GHz)。它通过发射和接收射频信号,利用回波的时间差来计算目标物体的距离、速度和方位。毫米波雷达通常采用频率调制连续波(FMCW)技术或脉冲多普勒技术来实现高精度测距和目标辨识。利用超声波作为探测信号,主要工作在20 kHz至200 kHz的频率范围内。它通过发射超声波信号,然后接收回波信号,并计算出目标物体与传感器之间的距离。超声波雷达通常采用时差法(Time-of-Flight)或频率调制连续波(FMCW)技术来实现测距。
二、性能特点
精度与分辨率:毫米波雷达具有更高的测距精度和分辨率,能够实现毫米级的测距精度。超声波雷达的精度一般在厘米级别,相对较低。测量范围:毫米波雷达在测距范围上具有较大的优势,能够实现几百米到数千米的测距。超声波雷达的测量范围通常局限在几十米以内,适用于短距离、近场环境的测量和探测。 车辆主动安全预警的4G云台管理适用于各种需要远程监控和管理车辆的场景,如矿场运输车,油罐车,物流车队等.中国台湾5G主动安全预警系统开发商
主动安全预警系统车规级高性能处理器主机必须能够在极端温度,湿度,振动和其他环境条件下长时间稳定运行.江苏挂车主动安全预警系统开发平台
(上篇)车载红外热像仪的技术原理主要基于红外热成像技术,这是一种通过捕捉物体发出的红外辐射,并将其转化为对应的热图像,进而反映物体表面温度分布的技术。以下是车载红外热像仪技术原理的详细解释:
一、红外辐射与热成像红外辐射:自然界中,凡是温度大于绝DUI零度(-273℃)的物体都能辐射红外线。红外线的波长在0.76μm至1000μm之间,比红光更长,且肉眼不可见。热成像:红外热成像技术利用特殊的电子装置(即红外热像仪)将物体表面的温度分布转换成人眼可见的图像。这种图像以不同颜色显示物体表面的温度分布,从而可以直观地观察到被测目标的整体温度状况。
二、车载红外热像仪的工作原理车载红外热像仪的工作原理可以分为以下三个步骤:红外辐射的捕捉:红外热像仪通过红外镜头捕捉目标物体的红外辐射。这个过程中,红外探测器起到关键作用,它是对红外辐射敏感的设备,用于捕捉、识别和感知红外辐射。电信号的转换与处理:捕捉到的红外辐射被红外探测器转化为微弱电信号。这个信号的大小可以反映出红外辐射的强弱。随后,利用后续电路将这个微弱的电信号进行放大和处理,从而清晰地采集到目标物体的温度分布情况。
江苏挂车主动安全预警系统开发平台