- 产地
- 上海
- 品牌
- 恩凤
- 型号
- 齐全
- 是否定制
- 是
编码器选型应注意三方面的参数:1、机械安装尺寸:包括定位止口,轴径,安装孔位;电缆出线方式;安装空间体积;工作环境防护等级是否满足要求。2、分辨率:即编码器工作时每圈输出的脉冲数,是否满足设计使用精度要求。3、电气接口:编码器输出方式常见有推拉输出(F型HTL格式),电压输出(E),集电极开路(C,常见C为NPN型管输出,C2为PNP型管输出),长线驱动器输出。其输出方式应和其控制系统的接口电路相匹配。上海恩凤电气专业为您服务。CABLEN 拉绳编码器CC1550-L430-1000S-S003.无锡海茵兰茨10-A0HN-5WH2-1024编码器技术支持

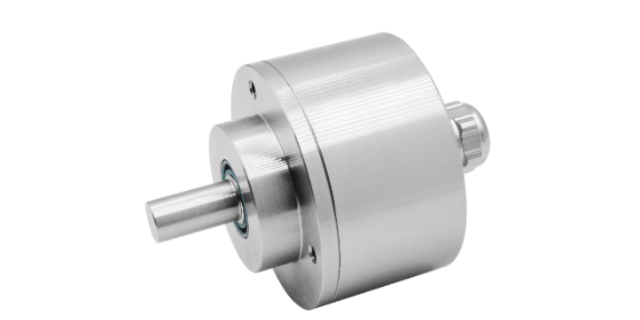
编码器是一种将旋转部件位置、位移物理量转换成一串数字脉冲信号的旋转式传感器,这些脉冲信号被控制系统采集、处理,发出一系列指令,调整改变设备的运行状态。如果编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线运动部件的位置、位移物理量。电动机输出信号反馈系统、测量和控制设备中都会用到编码器。编码器内部由光码盘和接收器两大部分组成,光码盘转动所产生的光变参数转换成相应的电参数,经由变频器内前置放大、信号处理系统,输出驱动功率器件的信号。安徽海茵兰茨10-A0HN-5WH2-1024编码器诚信经营编码器pg接线与参数 矢量变频器与编码器pg之间的连接方式,必须与编码器pg的型号相对应。

根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、***式以及混合式三种。 增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90º,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的***位置信息。
旋转编码器直接用于转角位移量的检测,直线位移被转换为转角位移后,也可以用旋转编码器来测量。下面将旋转编码器简称为编码器。光电增量式编码器的工作原理如下:随转轴一起转动的脉冲码盘上有均匀刻制的光栅,即在码盘上均匀地分布着若干个透光区段和遮光区段。这两种区段分得越密,则分辨率越高。增量式编码器没有固定的起始零点,输出的是与转角的增量成正比的脉冲,需要用计数器来计脉冲数。每转过一个透光区时,就发出一个脉冲信号,计数器当前值加1,计数结果对应于转角的增量。转轴处于静止状态时没有脉冲输出,增量式编码器主要用于转速测量。旋转单圈尽对式编码器,以转动中丈量光码盘各道刻线,以获取唯编码,当转动超过360度时,编码又回到原点。

信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。信号连接—编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。如单相联接,用于单方向计数,单方向测速。A.B两相联接,用于正反向计数、判断正反向和测速。A、B、Z三相联接,用于带参考位修正的位置测量。增量型旋转编码器有分辨率的差异,使用每圈产生的脉冲数来计,分辨率越高;这是选型的重要依据之一。江苏埃福创HS45ALV6P1G6W902S编码器技术支持
Wachendorff(沃申道夫)是德国**的编码器、测量系统及工业仪表制造商。无锡海茵兰茨10-A0HN-5WH2-1024编码器技术支持
增量式编码器----将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。在转轴旋转时,有相应的脉冲输出,其计数起点任意设定,可实现多圈无限累加和测量。绝对式编码器----直接输出数字量的传感器,常用于电机定位或测速系统。因其每一个角度位置都对应***的数字编码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。旋转增量式编码器----以转动时输出脉冲,通过计数设备来知道其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。多圈绝对式编码器----运用钟表齿轮机械的原理,当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,由机械位置确定编码,每个位置编码***不重复,而无需记忆。无锡海茵兰茨10-A0HN-5WH2-1024编码器技术支持
- 安徽OCD-DPB1B-1212-C10S-OCC绝DUI值编码器怎么样 2026-05-11
- 马鞍山雷恩RCI58T-HS12-S-01024-CA02-S002增量编码器怎么样 2026-05-11
- 石家庄POSITALOCD58-14453编码器技术支持 2026-05-11
- 江苏OCD-C2B1B-0012-C100-0CC绝DUI值编码器现货销售 2026-05-11
- 苏州AC1500-B10-5SG-1213-8绝dui值编码器直销价格 2026-05-11
- 临汾POSITALOCD58-CB0025-P109编码器直销价格 2026-05-11
- 唐山POSITALOCD58-22012-S10编码器是什么 2026-05-08
- 连云港BH5871024/28J1035R编码器直销价格 2026-05-08
- 石家庄雷恩RCI58T-HS14-S-01024-CA02-S001增量编码器厂家直销 2026-05-08
- 常州OCD-DPB1B-1412-CA30-0CC绝DUI值编码器直销价格 2026-05-08
- 石家庄POSITALOCD58-21016-S10编码器怎么样 2026-05-08
- 连云港AC1500-B10-5SG-1213-8绝dui值编码器直销价格 2026-05-08