机器人电缆的选择可以参照行业相关的测试标准,校准里规定了主要的技术指标与检测标准。同时,产品也通过了检测机构的检测。比如:参照德国TUV莱茵《2PfG2577RequirementsforCablesusedinRobotSystem》标准,工业机器人电缆需要进行下列测试项目:8.1Flexingtest二轮曲挠试验8.2Bending&rotatingtest弯曲&旋转试验8.3Rapidlybendingtest快速弯折试验8.4Cableveyortest拖链弯曲试验8.590°bendingtest90度弯折试验8.62DTorsiontest2D扭转试验8.7Verticaltorsiontest垂直扭转试验8.83DTorsiontest3D扭转试验在较好制造机器人电缆中,材料的性能占了产品性能的70%比重。本体机器人焊接电缆

多数人对机器人电缆的印象都局限在组装机器人中,但事实上不然,机器人电缆不光光是组装机器人一小部分应用,除此之外,还被普遍的使用在其他各个领域,比如自动化生产线、建筑工程建设、起重机、挖掘机以及水下探测项目中等等。机器人电缆之所以能够被普遍使用,其中主要是因为电缆性能属性比较突出,电缆材质柔软,拉伸性能优越,易弯曲,同时恢复性能也很强,电缆在短时间内弯曲于某一个状态下能够自行恢复,而不会导致电缆局部坏死,更不会影响到电缆后期使用。在各行各业发展加速了机器人电缆的需求,使得电缆市场出现了各种型号的机器人类型的电缆,这一点对于消费者有好处也有坏处,好处就在于选择性广了,可以挑选合适自身需求的电缆。日本特种机器人电缆销售厂家近些年机器人电缆的需要是越来越大。

工业机器人的普遍应用必将带来机器人电缆的巨大需求,目前,我国机器人电缆产业链并不完善,与欧美及日本的部分电缆企业在技术上还是存在较大差距,主要体现在设计、材料和制造上,还没有形成完全成熟的与机器人本体相配套的电缆。在"十二五"期间,工业机器人电缆成为发展规划的重点发展对象之一,明确了工业机器人电缆及相关零部件的发展方向,将有助于完善机器人电缆产业链,促进产业快速发展,实现制造业的升级转型。受政策影响,与机器人关联度较高的企业面对市场需求和技术升级的跟进速度非常快,朝机器人电缆方向发展的企业占比应该会越来越高,机器人电缆将为缆企到来更大利润空间。
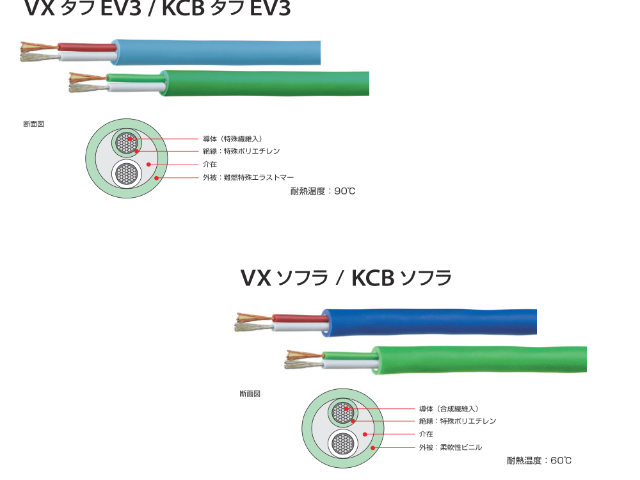
采用具有优异的弹性、柔性、耐腐蚀性和耐磨性的塑料作为电缆的绝缘和护套,能有效克服电缆柔性差,不耐弯曲,不耐磨,不耐化学溶剂的不足。从而延长了电缆的使用寿命,增强了电缆在特种环境下使用的安全性。新型的较佳实施例而已,并非对本实用新型作任何形式上的限制。任何熟悉本领域的技术人员,在不脱离本实用新型技术方案范围情况下,都可利用上述揭示的方法和技术内容对本实用新型技术方案作出许多可能的变动和修饰,或修改为等同变化的等效实施例。故凡是未脱离本实用新型技术方案的内容,依据本实用新型之形状、构造及原理所作的等效变化,均应涵盖于本实用新型的保护范围内。在连接回旋式或者升降工作台中也可以用到机器人电缆。

对电缆保护管有何规定?答:(1)电缆需要穿保护管敷设时,管子内径不应小于电缆外径的1.5倍,混凝土管、陶土管、石棉、水泥管的内径不应小于100mm;(2)电缆管的弯曲半径应符合所穿入电缆弯曲半径的规定;(3)每根管子多不应超过三个弯头,直角弯不应多于2个。如何测量电缆护套的外径?答:在护套圆周上均匀分布的五点处,测量护套外径和其平均值,其平均外径既为护套的外径。不同截面的铜芯电缆如何连接?答:不同截面的铜芯电缆连接,可采用开口弱背铜接管,以锡焊法连接,也可用纯铜棒按不同的截面要求连接成铜接管,以压接法连接。机器人电缆的优点:产品的耐磨性好。日本富士机器人电缆哪家好
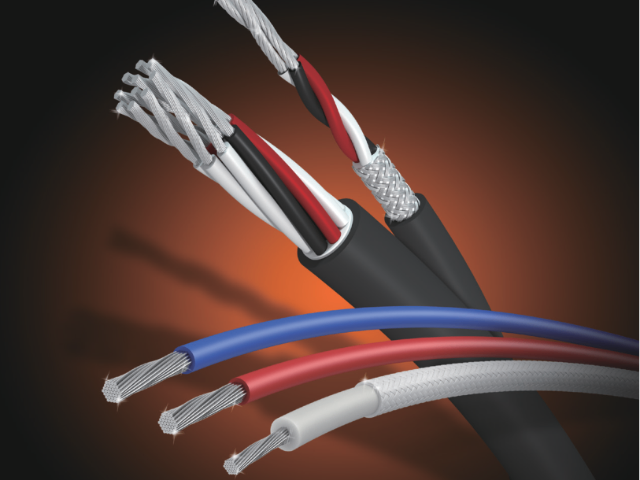
机器人电缆作为控制和监测信号的传输和电源连接,机器人电缆可以安装在扭力和弯曲应力共存的任意情况。本体机器人焊接电缆
一种自动敷设隧道电缆机器人,包含控制单元、运动单元、无线传输单元、可视化单元、牵引单元和电源,所述控制单元包括上位单片机控制芯片、软程序存储模块、接口模块、指令转化模块和红外传感器探测模块,运动单元包含下位单片机、机电转换模块、直流驱动电机、齿轮和机械关节,无线传输单元包含4G(第四代移动通信技术)传输模块、通信接口和天线,可视化单元包含可视化模块和高清摄像头,牵引单元包含牵引装置和告警提示装置,可视化单元、无线传输单元、控制单元依次连接组成机器人头部,机器人头部、运动单元、电源、牵引单元呈蛇形蜿蜒形状依次排列,控制单元的上位单片机控制芯片与运动单元的下位单片机通过CAN(串行通信协议)总线互相连接,控制单元、运动单元、牵引单元分别与电源互相连接。机器人电缆,往往具有以下特征:以较优的节距设计进行绞合。本体机器人焊接电缆