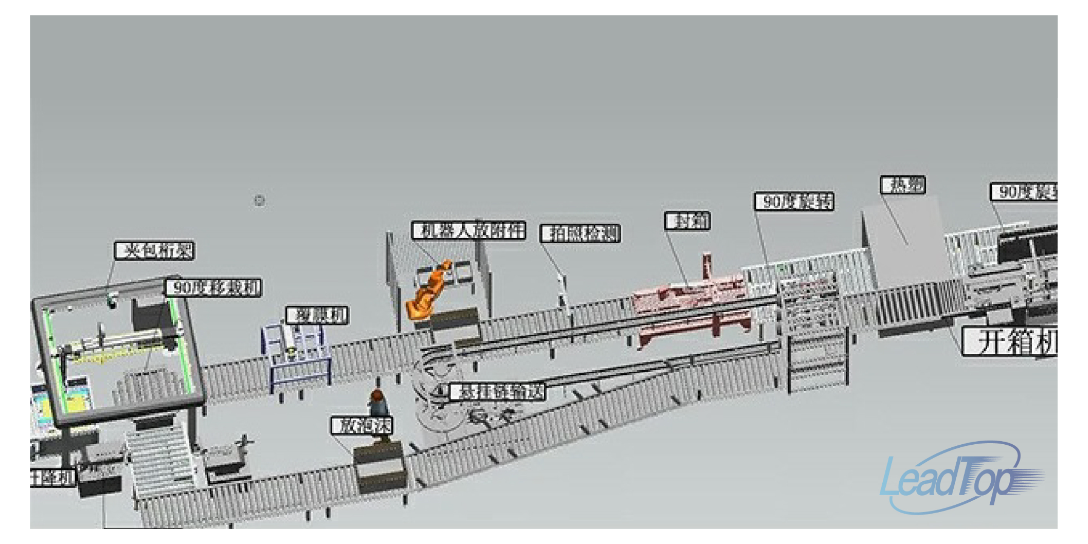
物流分拣机器人系统的特点:1.能连续、大批量地分拣货物。由于采用大生产中使用的流水线自动作业方式,自动分拣系统不受气候、时间、人的体力等的限制,可以连续运行,同时由于物流分拣机器人系统单位时间分拣件数多,因此物流分拣机器人系统的分拣能力是连续运行100个小时以上。2.分拣误差率极低。物流分拣机器人系统的分拣误差率大小主要取决于所输入分拣信息的准确性大小,这又取决于分拣信息的输入机制,如果采用人工键盘或语音识别方式输入,则误差率在3%以上,如采用条形码扫描输入,除非条形码的印刷本身有差错,否则不会出错。因此,目前物流分拣机器人系统主要采用条形码技术来识别货物。3.分拣作业基本实现无人化。国外建立物流分拣机器人系统的目的之一就是为了减少人员的使用,减轻工员的劳动强度,提高人员的使用效率,因此物流分拣机器人系统能比较大限度地减少人员的使用,基本做到无人化。国内智能物流搬运机器人系统就选明光利拓智能科技有限公司!江苏MES机器人系统常见问题

工业机器人系统产业链特点:工业机器人减速器是纯精密机械部件,除了对回转精度的要求特别高外,对刚度、抗疲劳程度、材料和工艺水平的要求也很高。工业机器人要能在生产中可靠地完成工序任务并确保工艺质量。这对工业机器人的定位精度和重复定位精度要求很高,因而结构简单紧凑、传递功率大、噪声低、传动平稳的高性能精密减速器成为工业机器人很重要的零部件,工业机器人运动的重要部件“关节”就是由它构成的,每个关节都要用到不同的减速机产品。工业机器人要求控制器与伺服之间的总线通信速度快,伺服电机具有良好的快速响应能力,起动转矩大,调速范围宽,能经受苛刻的运行条件,可进行频繁的正反向和加减速运行,并能在短时间内承受数倍过载。**机器人系统诚信为本汽车车顶篷喷胶设备,机器人系统就选明光利拓智能科技有限公司!

工业机器人系统搬运应用:1.搬运应用工作站组成:以板材弯折的搬运机器人为例,其工作站由以下部件组成:(1)以PC为基础的机器人控制器系统;(2)真空吸持器、气动工作吸盘;(3)货盘架;(4)上下料输送装置;(5)控制系统监测;(6)控制器;(7)电器柜;(8)安全围栏及安全门。2.搬运应用工作站特点工有:(1)应有物品的传送装置,其形式要根据物品的特点选用或设计;(2)可使物品准确地定位,以便机器人抓取;(3)多数情况下设有物品托板,或机动或自动地交换托盘(4)有些物品在传送过程中还要经过整型,以保证码垛的质量;(5)要根据被搬运的物品来设计指定的末端执行器;(6)应选用适合于搬运作业的机器人。
机器人系统基本的控制方法:(1)关节的运动控制及转矩(力)控制这种控制是分别对各个关节的运动(位置及速度)通过安装在各个关节的驱动电机进行PID控制来实现。实现时需要根据运动学理论将整个机器人的运动分解为各个自由度的运动来进行控制。这种控制系统常由上、下位机构成。上位机做运动规划,将要执行的运动转化为各个关节的运动,按控制周期传给下位机。下位机进行运动的插补运算及对关节进行伺服,所以常用多轴运动控制器作为机器人的关节控制器。(2)轨迹控制如果要求机器人沿着一定的目标轨迹运动则是轨迹控制。对于工业生产线上的机械臂,轨迹控制常用示教再现方式。示教再现分两种:点位控制(PTP),用于点焊、更换刀具等情况;连续路径控制(CP),用于弧焊、喷漆等作业。如果机器人本身能够主动地决定运动,那么可经常使用路径规划加在线路径追溯方式进行控制。国内物流分拣机器人系统就选明光利拓智能科技有限公司!

机器人系统中的视觉技术功能:机器人视觉处理程序的主要功能可分为以下几种:1、从摄像头实时读取视频数据,进行简单的预处理;2、随后进行图像处理,主要完成空域的图像增强。通过对图像进行二值化,将目标小球从背景中提取出来;3、计算目标的位置,进而计算出机器人头部的旋转角度,通过舵机驱动程序,控制机器人头部转动到目标所在角度,实现对目标物体的追溯。经过实验,机器人头部可较好地追溯目标,实现了视觉原型系统。机器人视觉系统的开发只是嵌入式系统在机器人领域中应用的一个方面,事实上,还有很多值得我们继续去实现的子系统,诸如语音系统(语音识别、语音输出)、行走控制(设计算法,实现平稳的行走、网络系统等)。注塑机自动化生产系统,机器人系统就选明光利拓智能科技有限公司!口碑好机器人系统联系方式
自动装配流水线,机器人系统就选明光利拓智能科技有限公司!江苏MES机器人系统常见问题
焊接机器人系统的应用:焊接机器人在焊接生产中可提高焊接质量,保证焊接过程的稳定,产品的一致性;提高生产效率;减小劳动强度;满足高度柔性化生产的要求。因此,焊接机器人普遍地应用于现代制造业。主要分布在汽车制造和汽车零部件、摩托车制造、工程机械、机车车辆、家用电器等行业。作为支柱产业的汽车制造和汽车零部件行业应用更为遍及,占焊接机器人应用比例3/4。焊接机器人应用系统包含机器人技术.焊接技术及工艺装备和系统控制技术三个方面。如何合理有效的将焊接机器人应用于现代制造业的焊接生产上,要做好焊接机器人应用系统主要是结合机器人技术,根据生产要求做好焊接技术和系统控制技术的工作。江苏MES机器人系统常见问题
明光利拓智能科技有限公司依托可靠的品质,旗下品牌利拓智能,西门子,DCCE以高质量的服务获得广大受众的青睐。明光利拓智能经营业绩遍布国内诸多地区地区,业务布局涵盖机器人及自动化系统,智慧农贸系统,MES系统,智慧供排水系统等板块。我们在发展业务的同时,进一步推动了品牌价值完善。随着业务能力的增长,以及品牌价值的提升,也逐渐形成电工电气综合一体化能力。公司坐落于安徽省明光市池河大道(东)188号,业务覆盖于全国多个省市和地区。持续多年业务创收,进一步为当地经济、社会协调发展做出了贡献。
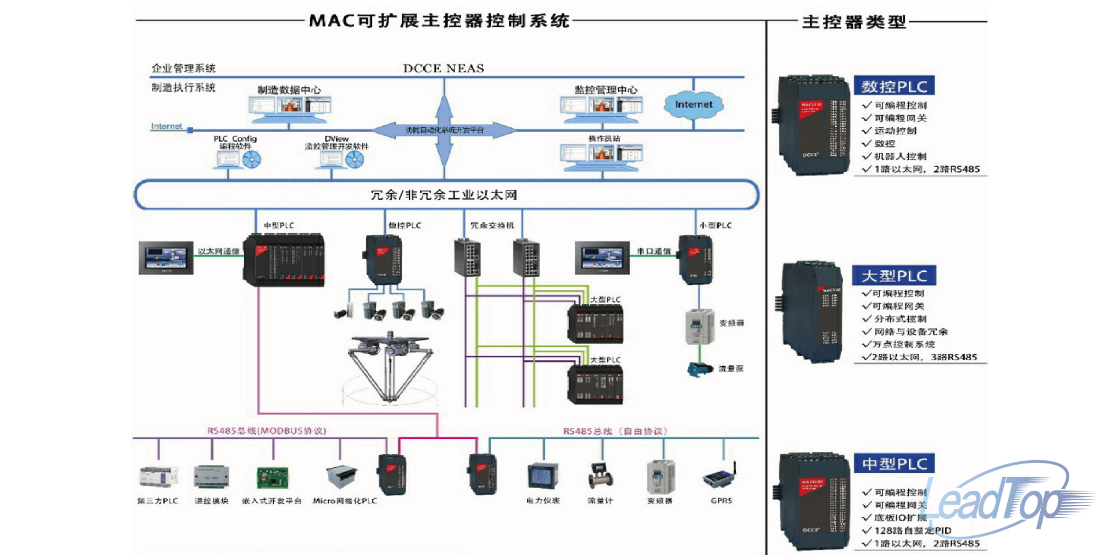
工业机器人系统控制技术的基本要求:(1)实现对工业机器人的位置、速度、加速度等控制功能,对于连续轨迹运动的工业机器人还必须具有轨迹的规划与控制功能。(2)方便的人机交互功能,操作人员采用直接指令代码对工业机器人进行作用指示。使用工业机器人具有作业知识的记忆、修正和工作程序的跳转功能。(3)具有对外部环境(包括作业条件)的检测和感觉功能。为使工业机器人具有对外部状态变化的适应能力,工业机器人应能对诸如视觉、力觉、触觉等有关信息进行测量、识别、判断、理解等功能。在自动化生产线中,工业机器人应用与其它设备交换信息,协调工作的能力。建筑机器人系统集成 3D 打印喷头与混凝土输送泵,按 BIM 模型自动...
- 浙江取件机器人系统技术指导 2026-04-09
- 江苏MES机器人系统供应商家 2026-04-09
- 上海取件机器人系统共同合作 2026-04-09
- 广东MES机器人系统报价 2026-04-09
- 广东MES机器人系统欢迎咨询 2026-04-09
- 北京机器人系统制造厂家 2026-04-09
- 江西口碑好机器人系统厂家 2026-04-09
- 江苏通用机器人系统大概多少钱 2026-04-09
- 安徽销售机器人系统联系方式 2026-04-09
- 广东机器人系统大概多少钱 2026-04-09



- 安徽搬运机器人系统共同合作 2026-04-09
- 安徽销售机器人系统销售公司 2026-04-08
- 口碑好机器人系统销售公司 2026-04-08
- 河北销售机器人系统常见问题 2026-04-08
- 码垛机器人系统销售 2026-04-08
- 安徽搬运机器人系统值得推荐 2026-04-08


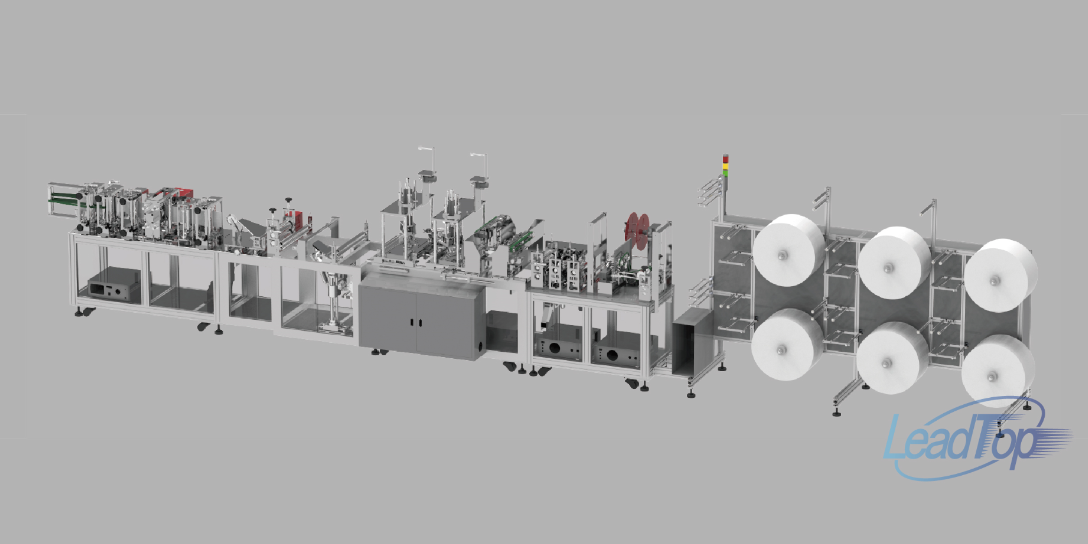

- 吉林平面口罩机全自动生产线应用 04-28
- 山西平面口罩机全自动生产线价格 04-28
- 江西装配全自动生产线售后服务 04-28
- 江西物流分拣全自动生产线定制方案 04-28
- 天津包装全自动生产线价格 04-28
- 江苏工业全自动生产线解决方案 04-28
- 浙江全自动生产线价格 04-28
- 吉林平面口罩机全自动生产线诚信合作 04-28
- 上海平面口罩机全自动生产线价格 04-28
- 云南平面口罩机全自动生产线诚信合作 04-28