机器人系统视觉行业应用优势:机器视觉的灰度分辨率强,一般可使用256个灰度级,采集系统可具有10bit、12bit、16bit等灰度级,远强于人类视觉的64个灰度级,也弥补了人类视觉对灰度分辨率的缺陷。目前,机器视觉的空间分辨率有4Kx4K的面阵摄像机和12K的线阵摄像机,通过设备各种光学镜头,可观测小物件至微米,大物体至天体的目标。此外,机器视觉可从紫外光到红外光的较宽光谱范围,也有X光等特殊摄像机等配件适用于不同特殊用途。机器人喷粉设备,机器人系统就选明光利拓智能科技有限公司!江苏口碑好机器人系统销售

工业机器人系统码垛应用:码垛机器人是用在工业生产过程中执行大批量工件、包装件的获取、搬运、码垛、拆垛等任务的一类工业机器人,是集机械、电子、信息、智能技术、计算机科学等学科于一体的高新机电产品。码垛机器人能极大程度的节省劳动力、节省空间,除此以外还具备运作灵活准确、快速高效、稳定性高、作业效率高的特点。码垛应用工作站特点:(1)结构简单、零部件少。(2)占地面积少。(3)适用性强。(4)能耗低。(5)全部控制可在控制柜屏幕上操作即可,操作非常简单。(6)只需定位抓起点和摆放点,示教方法简单易懂。(7)能够实时调节动作节拍、移动速率、末端执行器动作状态。(8)可更换不同末端执行器以适应物料形状的不同,方便、快捷。(9)能够与传送带、移动滑轨等辅助设备集成,实现柔性化生产。 安徽通用机器人系统销售厂家物流分拣机器人系统就选明光利拓智能科技有限公司!

焊接机器人系统:焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。焊接机器人主要包括机器人和焊接设备两部分。机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等。焊接机器人系统是由机器人操作机、变位机、控制器、焊接系统、焊接传感器、**控制计算机、安全设备组成。焊接机器人系统拥有焊接质量高,稳定性好;可提高劳动生产率;改善劳动条件;降低工人技术操作水平;缩短产品更新换代周期;降低生产成本;柔性化程度高,可实现小批量产品的焊接自动化;在各种极限条件下完成焊接作业等优点。
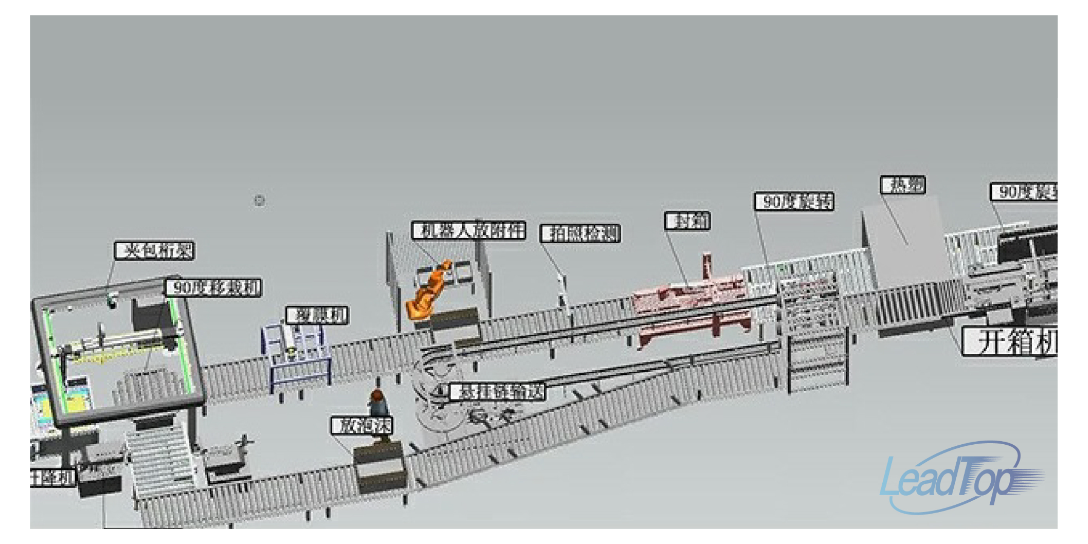
物流分拣机器人系统:物流分拣机器人系统是先进配送中心所必需的设施条件之一。具有很高的分拣效率,自动分拣机是提高物流配送效率的一项关键因素。它是二次大战后在美国、日本的物流中心中普遍采用的一种自动分拣系统,该系统目前已经成为发达国家大中型物流中心不可缺少的一部分。分拣设备是完成仓库、配送中心拣选、分货、分放作业的现代化设备,是进行分拣、配送作业的强有力的技术保证,是自动化立体仓库不可缺少的先进的设备,决定着仓库的作业能力和作业规模,反映着物流技术水平的高低。国内物流分拣机器人系统就选明光利拓智能科技有限公司!

机器人系统视觉行业应用优势:人类视觉适应性强,可在复杂环境中识别目标,较为适合无结构化场景,而机器视觉具有速度、准确度和可重复性等优势,更擅长定量测定结构化场景。使用合适的相机分辨率和光学元件制造的机器视觉可检测人眼难以看到的物体细节。机器视觉检测可避免测试系统和待测零件发生物理接触、零件损坏、由机械组件磨损产生的维护和成本支出,同时减少制造过程中的人为干预,从而增加安全性和操作便捷性。此外,还可以避免人为污染无尘室,保护工人误入危险环境。搬运机器人系统就选明光利拓智能科技有限公司!江苏口碑好机器人系统销售
码垛机器人系统应用于箱体等各种形状的包装成品码垛作业,机器人系统就选明光利拓智能科技有限公司!江苏口碑好机器人系统销售
工业机器人系统产业链特点:工业机器人减速器是纯精密机械部件,除了对回转精度的要求特别高外,对刚度、抗疲劳程度、材料和工艺水平的要求也很高。工业机器人要能在生产中可靠地完成工序任务并确保工艺质量。这对工业机器人的定位精度和重复定位精度要求很高,因而结构简单紧凑、传递功率大、噪声低、传动平稳的高性能精密减速器成为工业机器人很重要的零部件,工业机器人运动的重要部件“关节”就是由它构成的,每个关节都要用到不同的减速机产品。工业机器人要求控制器与伺服之间的总线通信速度快,伺服电机具有良好的快速响应能力,起动转矩大,调速范围宽,能经受苛刻的运行条件,可进行频繁的正反向和加减速运行,并能在短时间内承受数倍过载。江苏口碑好机器人系统销售

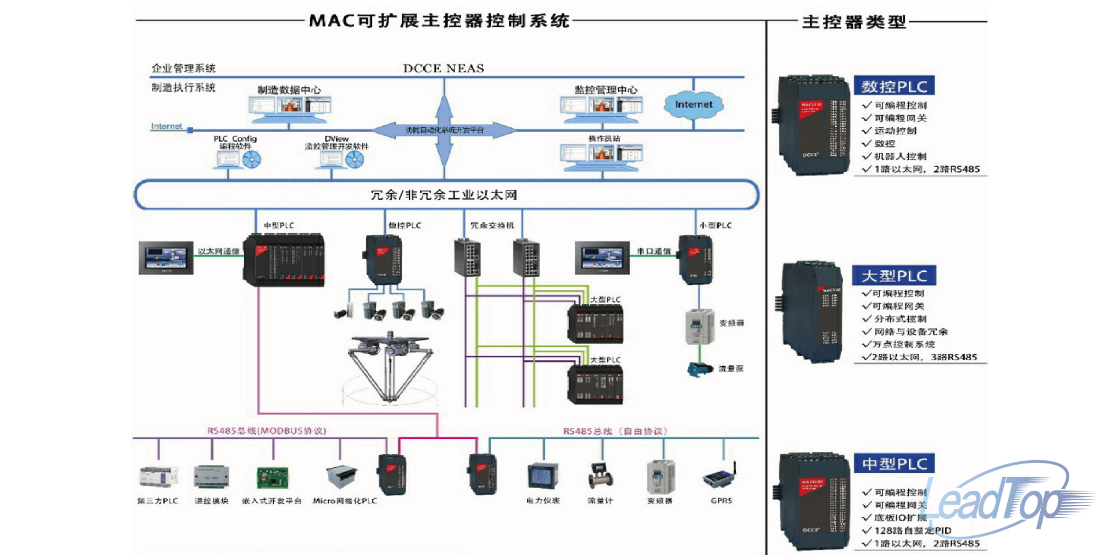
工业机器人系统控制技术的基本要求:(1)实现对工业机器人的位置、速度、加速度等控制功能,对于连续轨迹运动的工业机器人还必须具有轨迹的规划与控制功能。(2)方便的人机交互功能,操作人员采用直接指令代码对工业机器人进行作用指示。使用工业机器人具有作业知识的记忆、修正和工作程序的跳转功能。(3)具有对外部环境(包括作业条件)的检测和感觉功能。为使工业机器人具有对外部状态变化的适应能力,工业机器人应能对诸如视觉、力觉、触觉等有关信息进行测量、识别、判断、理解等功能。在自动化生产线中,工业机器人应用与其它设备交换信息,协调工作的能力。建筑机器人系统集成 3D 打印喷头与混凝土输送泵,按 BIM 模型自动...
- 浙江取件机器人系统技术指导 2026-04-09
- 江苏MES机器人系统供应商家 2026-04-09
- 上海取件机器人系统共同合作 2026-04-09
- 广东MES机器人系统报价 2026-04-09
- 广东MES机器人系统欢迎咨询 2026-04-09
- 北京机器人系统制造厂家 2026-04-09
- 江西口碑好机器人系统厂家 2026-04-09
- 江苏通用机器人系统大概多少钱 2026-04-09
- 安徽销售机器人系统联系方式 2026-04-09
- 广东机器人系统大概多少钱 2026-04-09


- 安徽搬运机器人系统共同合作 2026-04-09
- 安徽销售机器人系统销售公司 2026-04-08
- 口碑好机器人系统销售公司 2026-04-08
- 河北销售机器人系统常见问题 2026-04-08
- 码垛机器人系统销售 2026-04-08
- 安徽搬运机器人系统值得推荐 2026-04-08


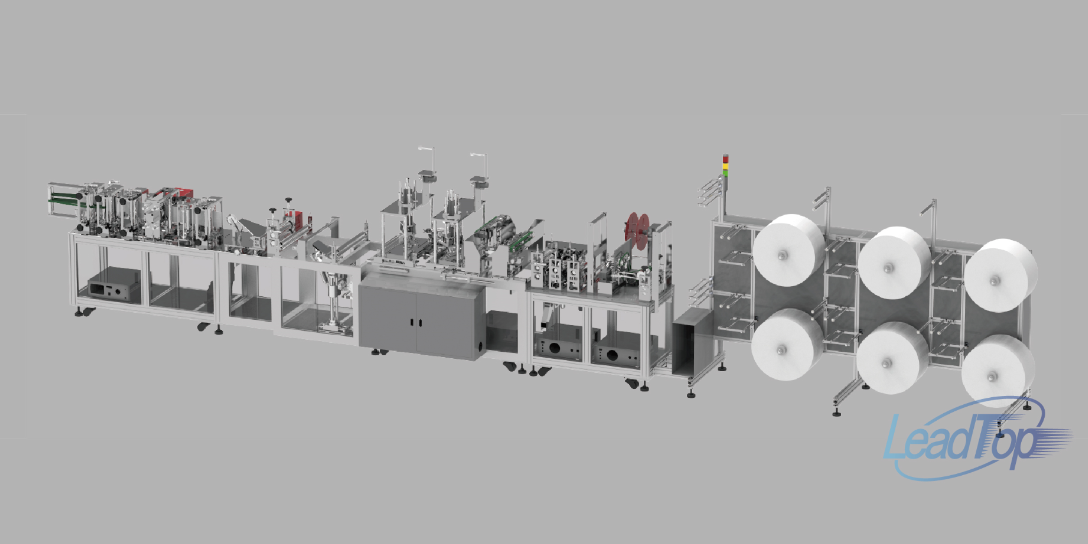

- 吉林平面口罩机全自动生产线应用 04-28
- 山西平面口罩机全自动生产线价格 04-28
- 江西装配全自动生产线售后服务 04-28
- 江西物流分拣全自动生产线定制方案 04-28
- 天津包装全自动生产线价格 04-28
- 江苏工业全自动生产线解决方案 04-28
- 浙江全自动生产线价格 04-28
- 吉林平面口罩机全自动生产线诚信合作 04-28
- 上海平面口罩机全自动生产线价格 04-28
- 云南平面口罩机全自动生产线诚信合作 04-28