机器人系统的视觉应用工作过程:1、工件定位检测器探测到物体已经运动至接近摄像系统的视野中心,向图像采集部分发送触发脉冲。2、图像采集部分按照事先设定的程序和延时,分别向摄像机和照明系统发出启动脉冲。3、摄像机停止目前的扫描,重新开始新的一帧扫描,或者摄像机在启动脉冲来到之前处于等待状态,启动脉冲到来后启动一帧扫描。4、摄像机开始新的一帧扫描之前打开曝光机构,曝光时间可以事先设定。5、另一个启动脉冲打开灯光照明,灯光的开启时间应该与摄像机的曝光时间匹配。6、摄像机曝光后,正式开始一帧图像的扫描和输出。7、图像采集部分接收模拟视频信号通过A/D将其数字化,或者是直接接收摄像机数字化后的数字视频数据。8、图像采集部分将数字图像存放在处理器或计算机的内存中。9、处理器对图像进行处理、分析、识别,获得测量结果或逻辑控制值。10、处理结果控制流水线的动作、进行定位、纠正运动的误差等。柔性生产配置支持 MES 系统快速切换产品工艺参数,机器人自动适配不同型号工件的加工需求。上海工业机器人系统参考价格

智能搬运机器人系统的性能要求(二)柔性要强:企业道路通道可能会出现被临时占用的情况,智能搬运机器人如果柔性不强,会在遇到障碍物时进行停障处理,如果人工不及时处理,可能会造成道路拥堵情况。因此智能搬运机器人需要适应复杂工厂环境,在道路宽度满足的条件下,当运行路线上被人或者是物料临时占用时,智能搬运机器人可以实现绕障通行。实施简单:实施简单是指在不影响现有生产情况下,智能搬运机器人在现场只需简单几个操作,便可完成初步部署,实施简单方便,基本不会影响生产。操作便捷:操作便捷是指现场作业人员不需要复杂指令就可以灵活控制机器人执行相应任务。采用可视化的UI操作界面,界面简洁美观,可在触摸屏上下达任务、去充电、去休息等。广东机器人系统值得信赖企业全向移动底盘让搬运机器人在狭窄通道灵活转向,适应立体仓库的高密度存储环境。

工业机器人系统中驱动系统的作用是什么:驱动系统是驱使工业机器人机械臂运动的机构。按照控制系统发出的指令信号,借助动力元件使机器人运行起来,给各个关节即每个运动自由度安装传动装置,这就是驱动系统。其作用是提供机器人各部委、各关节动作的原动力。根据驱动源的不同,驱动系统可分为电动、液压、气动三种也包括把它们结合起来应用的综合系统。驱动系统可以与机械系统直接相连,也可通过同步带、链条、齿轮、谐波转动装置等与机械系统间接相连。运动精度不高、重负载或有防爆要求的机器人采用液压、气压驱动,工业机器人大多采用电气驱动,而其中属交流伺服驱动应用普遍,且驱动器布置大都采用一个关节一个驱动器。
机器人系统基本的控制方法:1.关节的运动控制及转矩(力)控制这种控制是分别对各个关节的运动(位置及速度)通过安装在各个关节的驱动电机进行PID控制来实现。实现时需要根据运动学理论将整个机器人的运动分解为各个自由度的运动来进行控制。这种控制系统常由上、下位机构成。上位机做运动规划,将要执行的运动转化为各个关节的运动,按控制周期传给下位机。下位机进行运动的插补运算及对关节进行伺服,所以常用多轴运动控制器作为机器人的关节控制器。2.轨迹控制如果要求机器人沿着一定的目标轨迹运动则是轨迹控制。对于工业生产线上的机械臂,轨迹控制常用示教再现方式。示教再现分两种:点位控制(PTP),用于点焊、更换刀具等情况;连续路径控制(CP),用于弧焊、喷漆等作业。如果机器人本身能够主动地决定运动,那么可经常使用路径规划加在线路径追溯方式进行控制。实时看板同步显示机器人运行状态、任务完成率等数据,助力车间管理者优化产能分配。

工业机器人系统搬运应用:1.搬运应用工作站组成:以板材弯折的搬运机器人为例,其工作站由以下部件组成:(1)以PC为基础的机器人控制器系统;(2)真空吸持器、气动工作吸盘;(3)货盘架;(4)上下料输送装置;(5)控制系统监测;(6)控制器;(7)电器柜;(8)安全围栏及安全门。2.搬运应用工作站特点工有:(1)应有物品的传送装置,其形式要根据物品的特点选用或设计;(2)可使物品准确地定位,以便机器人抓取;(3)多数情况下设有物品托板,或机动或自动地交换托盘(4)有些物品在传送过程中还要经过整型,以保证码垛的质量;(5)要根据被搬运的物品来设计指定的末端执行器;(6)应选用适合于搬运作业的机器人。注塑取件机器人系统就选明光利拓智能科技有限公司!安徽工业机器人系统销售
能耗监测功能统计机器人运行功耗,结合生产节拍优化启停策略,助力车间绿色制造。上海工业机器人系统参考价格
焊接机器人系统:焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。焊接机器人主要包括机器人和焊接设备两部分。机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等。焊接机器人系统是由机器人操作机、变位机、控制器、焊接系统、焊接传感器、**控制计算机、安全设备组成。焊接机器人系统拥有焊接质量高,稳定性好;可提高劳动生产率;改善劳动条件;降低工人技术操作水平;缩短产品更新换代周期;降低生产成本;柔性化程度高,可实现小批量产品的焊接自动化;在各种极限条件下完成焊接作业等优点。上海工业机器人系统参考价格
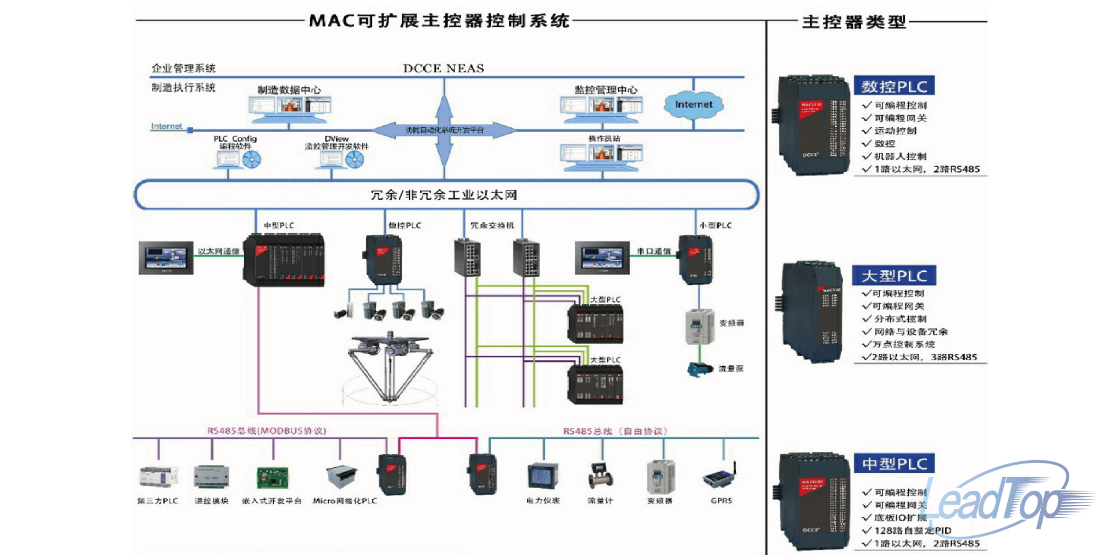
工业机器人系统控制技术的基本要求:(1)实现对工业机器人的位置、速度、加速度等控制功能,对于连续轨迹运动的工业机器人还必须具有轨迹的规划与控制功能。(2)方便的人机交互功能,操作人员采用直接指令代码对工业机器人进行作用指示。使用工业机器人具有作业知识的记忆、修正和工作程序的跳转功能。(3)具有对外部环境(包括作业条件)的检测和感觉功能。为使工业机器人具有对外部状态变化的适应能力,工业机器人应能对诸如视觉、力觉、触觉等有关信息进行测量、识别、判断、理解等功能。在自动化生产线中,工业机器人应用与其它设备交换信息,协调工作的能力。建筑机器人系统集成 3D 打印喷头与混凝土输送泵,按 BIM 模型自动...
- 浙江取件机器人系统技术指导 2026-04-09
- 江苏MES机器人系统供应商家 2026-04-09
- 上海取件机器人系统共同合作 2026-04-09
- 广东MES机器人系统报价 2026-04-09
- 广东MES机器人系统欢迎咨询 2026-04-09
- 北京机器人系统制造厂家 2026-04-09
- 江西口碑好机器人系统厂家 2026-04-09
- 江苏通用机器人系统大概多少钱 2026-04-09
- 安徽销售机器人系统联系方式 2026-04-09
- 广东机器人系统大概多少钱 2026-04-09



- 安徽搬运机器人系统共同合作 2026-04-09
- 安徽销售机器人系统销售公司 2026-04-08
- 口碑好机器人系统销售公司 2026-04-08
- 河北销售机器人系统常见问题 2026-04-08
- 码垛机器人系统销售 2026-04-08
- 安徽搬运机器人系统值得推荐 2026-04-08



- 吉林平面口罩机全自动生产线应用 04-28
- 山西平面口罩机全自动生产线价格 04-28
- 江西装配全自动生产线售后服务 04-28
- 江西物流分拣全自动生产线定制方案 04-28
- 天津包装全自动生产线价格 04-28
- 江苏工业全自动生产线解决方案 04-28
- 浙江全自动生产线价格 04-28
- 吉林平面口罩机全自动生产线诚信合作 04-28
- 上海平面口罩机全自动生产线价格 04-28
- 云南平面口罩机全自动生产线诚信合作 04-28