机器人在CNC加工智能化升级中,桁架机器人通过双夹爪协同抓取技术实现工件快速装卸,其伺服驱动系统采用齿轮齿条传动方式5,X轴与Z轴重复定位精度达±0.05mm,单次作业循环时间压缩至12秒6。该系统集成RFID工艺数据库,通过扫描工件芯片可自动匹配300种加工程序参数(含切削速度、进给量、刀具补偿值等)3,兼容直径φ50-250mm的轮毂、连杆等汽车零部件加工需求7。某汽车零部件工厂部署该方案后,通过优化夹具快速切换模块(换型时间<15秒),实现多品种混合生产,机床有效利用率从65%提升至90%,日均加工量突破5000件清理机械臂的冷却风扇,避免因积尘导致散热不佳,浙江展杭清洁维护,保障设备低温运行。宁波ABB6700机器人维修

极大提升了组装效率。成品检测与包装:组装完成的鼠标会被移送至成品暂存区,由学生或检测设备进行基础功能检测,包括按键的灵敏程度、滚轮转动的顺畅性等。经检测合格的鼠标随即进入包装环节,至此完成整个组装流程。项目优势教学赋能:为自动化、机器人相关的学生提供了一个高质且难得的实践教学平台。丰富多元的教学内容与创新独特的教学形式,让学生在实践中深度掌握知识与技能,有助于培养出更贴合市场需求的高素质应用型人才,提升学生未来在就业市场的竞争力。科研助力:该项目为深入研究多机器人协作技术、智能制造系统优化等前沿领域提供了宝贵的实验基础与数据支撑。通过对项目实践过程中的技术难题攻克与经验总结,能够推动相关领域的科研工作不断取得新突破,促进学术成果的转化与应用。社会价值:明显提升了**在智能制造教育领域的知晓度与影响力,源源不断地为行业输送素养过硬的人才,为智能制造产业的蓬勃发展注入强劲动力,助力产业升级与创新发展,为社会经济发展贡献教育力量。蚌埠ABB4600机器人维修检查机械臂的电缆接头,避免因接触不良导致信号中断,浙江展杭加固连接,保障信号稳定传输。

ABB的六轴工业机器人技术参数体系涵盖负载能力、作业范围、运动精度及环境适应性等**维度,结合典型机型应用场景详解如下:一、全局参数范围负载能力:5kg至800kg35,覆盖精密装配到重型搬运全场景臂展半径:(紧凑型)至(超长臂展)13重复定位精度:±(高精度机型)至±(重型机型)35防护等级:IP54(通用环境)至IP69K(耐高温高压冲洗)24运动速度:末端比较大线速度、典型机型参数对比型号IRB1620IRB6700-300/负载12kg3300kg5臂展重复精度±±比较大速度5m/旋转能力360°连续旋转7720°连续旋转5适用场景汽车仪表盘精密装配10重型机械搬运/立体仓库堆垛15三、扩展技术特性运动控制第六轴采用中空腕结构,便于管线集成2支持(如IRB120机型)9环境适应性IP67防护版本可承受95%湿度环境8耐高温型号直接接触180℃工件6能效表现标配能量再生单元。
金属板材上下料生产线的搬运机器人,在高温、粉尘环境下工作,其电机、减速机和导轨容易受到污染和磨损。某企业的板材搬运机器人运行 3 年后,出现电机过热、导轨卡顿的现象。智小航维护团队为机器人加装高效防尘罩,定期清理电机和减速机内部的粉尘。对磨损的导轨进行研磨修复,更换高精度滑块,并使用抗高温润滑脂进行保养。此外,安装温度传感器实时监测电机温度,当温度过高时自动启动散热装置。经过维护,该机器人使用寿命从 5 年延长至 8 年,故障率降低 70%。发那科搬运机器人故障诊断,定位问题根源,有问题找浙江展杭,延长设备使用寿命。
电子元器件上下料生产线中,小型精密取放机器人以极高的速度和精度作业,其真空吸盘和微型传动机构易出现老化和损耗。某企业的取放机器人运行 18 个月后,出现吸盘吸力不足、取件位置偏移的问题,导致生产效率下降。智小航维护人员使用压力检测仪对真空系统进行多方面检测,发现吸盘密封圈老化、真空泵膜片破损。团队更换耐磨损的全氟橡胶密封圈和高性能真空泵,对微型传动机构进行清洁和润滑。同时,利用视觉校准系统重新标定机器人坐标系,确保取放精度。经过维护,机器人使用寿命从 3 年延长至 5 年,生产效率恢复并提升 15%。检测机械臂的电池电量,防止因断电丢失程序数据,有问题找浙江展杭,及时更换电池保数据。泉州ABB2600机器人售后电话
校准机械臂的位置精度,能确保生产加工精度达标,浙江展杭专业校准,保障设备精确作业。宁波ABB6700机器人维修
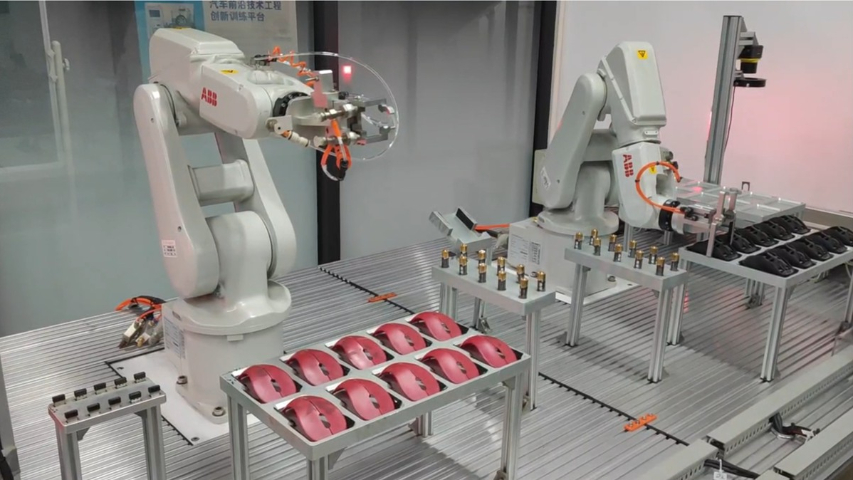
项目背景与目标背景:杭州某**积极投身于智能制造教育的前沿探索,精心开展双机协作鼠标组装工作站调试项目。在智能制造浪潮席卷全球的当下,传统制造业向智能化转型的需求日益迫切,社会对掌握**自动化技术的人才求贤若渴。目标:敏锐洞察这一趋势,旨在通过此项目,为学生打造一个集高度仿真性与深度挑战性于一体的实训平台,助力学生在实践操作中深度洞悉自动化生产线的运作机理,熟练掌握多机器人协同作业的关键技术。系统构成机器人重点:项目选用两台型号为120*2的高性能机器人作为主力设备。这两款机器人凭借其出色的机械设计与精密的电子控制系统,展现出非凡的运动性能。其重复定位精度可达±,能够如绣花针般精确地抓取和安置各类鼠标零部件,为组装流程的精确度筑牢根基。灵活多变的关节设计,赋予机器人在狭小局促空间内自由穿梭、灵活作业的能力,轻松驾驭复杂的组装动作。1kg的负载能力,足以承载鼠标组装环节涉及的各类零部件重量,确保运行稳定。定制实训台:专门定制了契合项目需求的实训台。该实训台在设计上深度融合人机工程学原理,经精确测算的高度,充分考虑学生操作时的舒适度,长时间作业也不易产生疲劳感。同时,配备**的光幕传感器。宁波ABB6700机器人维修
工业机器人保养规范工业机器人的关节减速器需每2000工作小时更换润滑脂。清洗旧油脂时应使用无纺布配合...
【详情】浙江展杭提供多品牌机器人维护保养升级改造等服务ABB机器人型号:IRB120、IRB140、IRB1...
【详情】ABBIRB2600四轴机器人凭借其高速稳定性与紧凑结构设计,在简单重复作业场景中展现出**...
【详情】金属加工领域的激光切割车间,工业机器人在高温、高粉尘环境中执行精密切割任务。长期使用后,激光头聚焦精...
【详情】工业机器人在汽车制造行业中广泛应用于焊接、喷涂、装配等环节,其高精度与高效性 提升生产线产能。以焊接...
【详情】在新能源电池制造的注液工序中,工业机器人以 ±0.01ml 的超高精度完成电解液注入。由于电解液具有...
【详情】监控确保物料在不同环节间顺畅流转;以及各类传感器,用于实时监测机器人、车床及物料的状态,为整个系统...
【详情】电子元器件打磨生产线,小型精密打磨机器人对芯片、电路板等进行精细加工,对定位精度和稳定性要求极高。某...
【详情】一旦有人体不慎闯入危险区域,机器人会瞬间响应,即刻停止运行,多方位保障学生的人身安全。实训台上对工...
【详情】工业机器人项目背景与目标背景:在温州某开关元器件厂的生产流程里,机加工车床的上下料长期依赖人工操作...
【详情】一旦有人体不慎闯入危险区域,机器人会瞬间响应,即刻停止运行,多方位保障学生的人身安全。实训台上对工...
【详情】一旦有人体不慎闯入危险区域,机器人会瞬间响应,即刻停止运行,多方位保障学生的人身安全。实训台上对工...
【详情】