【工业智造厂家】浙江展杭为您带来ABB焊接机器人全系解决方案!🔥作为ABB代理商,我们推荐这三款爆款机型:1️⃣IRB4600战神版搭载TrueView3D视觉系统(200Hz刷新率)焊缝自动追踪精度±比较高焊接速度600mm/s(相当于1秒焊完一部手机长度)汽车行业实测:良品率↑2️⃣柔性焊装天团6台联机组成智能产线支持8款车型无缝切换日产1200个汽车底盘比人工团队节省15个岗位3️⃣航天**款钛合金激光焊熔±💡为什么选择我们?✔️浙江省***ABB焊接机器人五星服务商✔️提供焊接工艺调试✔️24小时应急响应✔️赠送价值5万的焊接培训课程【真实案例】拓普汽车宁波工厂采用我们的方案后:✓焊接效率提升43%✓年节省人工成本680万✓产品不良率下降至📞现在咨询即送《智能焊接白皮书》+工厂实地考察名额!安川喷涂机器人年度保养计划,预防性维护更省心,保养找浙江展杭,延长设备使用寿命。温州ABB6700机器人维修

工业机器人作为现代智能制造的机械设备,其工作效率直接影响生产线产能。然而机器人长期高度运行会导致零部件磨损、润滑失效等问题。智小杭提供的工业机器人维护保养服务,通过定期检查减速器、伺服电机等关键部件,及时更换老化密封圈与润滑油,有效降低机械磨损率。例如,某汽车焊接车间采用智小杭的年度保养计划后,机器人故障率降低40%,整机寿命延长3年以上。科学的维护不 能减少意外停机损失,更能通过预防性保养提高设备稳定性。安庆ABB660机器人维修清理机械臂的集尘装置,防止因堵塞影响吸尘效果,浙江展杭清理维护,保持环境清洁。

在CNC加工智能化升级中,桁架机器人通过双夹爪协同抓取技术实现工件快速装卸,其伺服驱动系统采用齿轮齿条传动方式5,X轴与Z轴重复定位精度达±0.05mm,单次作业循环时间压缩至12秒6。该系统集成RFID工艺数据库,通过扫描工件芯片可自动匹配300种加工程序参数(含切削速度、进给量、刀具补偿值等)3,兼容直径φ50-250mm的轮毂、连杆等汽车零部件加工需求7。某汽车零部件工厂部署该方案后,通过优化夹具快速切换模块(换型时间<15秒),实现多品种混合生产,机床有效利用率从65%提升至90%,日均加工量突破5000件
工业机器人 使机加工车床的实际加工时间占比明显提高。相比人工操作,可实现数倍的产能提升,有力满足企业日益增长的订单需求。保障产品质量一致性:避免了人工上下料过程中因疲劳、情绪等因素导致的操作差异,确保每次上下料的位置和力度精确一致,从而有效提升开关元器件的加工精度和质量稳定性,降低次品率。降低劳动强度与安全风险:将工人从繁重、重复且存在一定安全隐患的上下料工作中解放出来,减少工伤事故的发生概率,同时改善了工人的工作环境,有助于企业吸引和留住人才。便于生产管理与数据追溯:整个自动上下料系统可与企业的生产管理系统无缝对接,实时采集生产数据,如加工数量、设备运行状态等。这些数据为企业的生产调度、设备维护以及质量追溯提供了有力依据,助力企业实现智能化生产管理。检查机械臂的伺服驱动器,避免因性能下降影响运行,浙江展杭检测维修,恢复驱动器正常性能。

在汽车零部件冲压生产线上,工业机器人以每分钟120次的高频次作业,快速完成金属板材成型任务。长时间过渡运行下,设备的机械部件磨损、控制系统故障等问题难以避免。一旦出现异常,智小杭的售后服务体系即刻启动。智小杭拥有专业的7×24小时售后响应团队,接到报修后,工程师会在1小时内通过远程诊断系统初步分析故障原因,携带专门检测设备和备用零部件4小时内抵达现场。以某汽车制造企业为例,曾因冲压机器人的伺服电机突发故障导致产线停滞,智小杭工程师到达后,利用故障诊断系统快速定位问题,用2小时就完成电机更换与系统调试,使生产线恢复运转,避免了企业因停机造成的近百万元经济损失。此外,智小杭还为企业提供定期预防性维护服务,每季度对机器人的传动机构、润滑系统等关键部位进行深度检测与保养,延长设备使用寿命,保障生产线的稳定运行。完善的保养体系符合工业设备管理规范,是企业智能制造水平的重要体现。三明ABB7600 机器人维护保养
建立完整的保养档案有助于分析设备劣化趋势,优化备件采购周期。温州ABB6700机器人维修
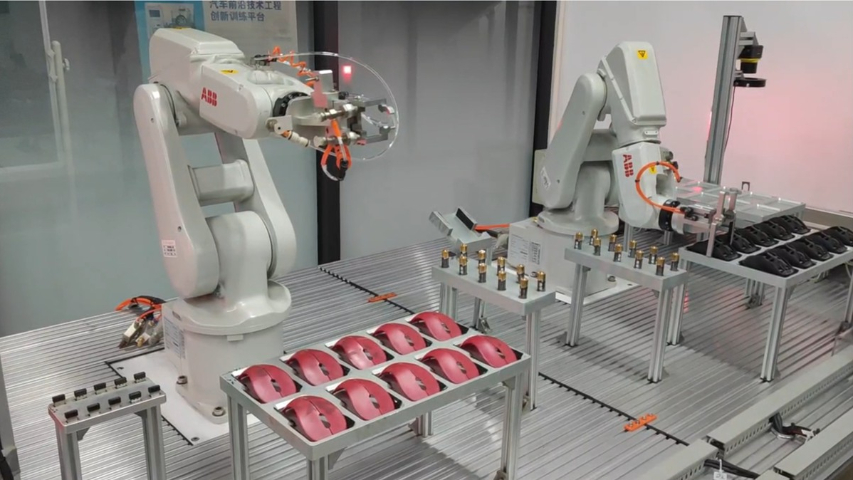
机器人型号:4600配合康耐视3D视觉对小车内的产品进行有序抓取放置到输送线上。工作原理视觉识别:康耐视3D视觉系统首先对小车内的印钞产品进行扫描,获取产品的三维图像数据。然后通过图像处理算法,对图像进行分析和处理,识别出产品的位置、形状、姿态等信息,并将这些信息传输给机器人控制器。路径规划:机器人控制器根据视觉系统提供的产品信息,结合机器人的当前位置和姿态,规划出便捷的抓取路径和动作序列。在规划路径时,会考虑机器人的运动学和动力学约束,以及避免与周围环境和设备发生碰撞等因素。抓取操作:机器人按照规划好的路径和动作序列,运动到产品上方,通过末端执行器(如夹具)对产品进行抓取。在抓取过程中,机器人会根据视觉系统实时反馈的产品位置信息,对抓取动作进行微调,确保抓取的准确性和稳定性。放置输送:机器人抓取产品后,按照预设的路径将产品放置到输送线上。输送线将产品输送到下一个生产环节,完成整个拆垛和输送过程。温州ABB6700机器人维修
浙江展杭提供多品牌机器人维护保养升级改造等服务ABB机器人型号:IRB120、IRB140、IRB1...
【详情】ABBIRB2600四轴机器人凭借其高速稳定性与紧凑结构设计,在简单重复作业场景中展现出**...
【详情】金属加工领域的激光切割车间,工业机器人在高温、高粉尘环境中执行精密切割任务。长期使用后,激光头聚焦精...
【详情】工业机器人在汽车制造行业中广泛应用于焊接、喷涂、装配等环节,其高精度与高效性 提升生产线产能。以焊接...
【详情】在新能源电池制造的注液工序中,工业机器人以 ±0.01ml 的超高精度完成电解液注入。由于电解液具有...
【详情】监控确保物料在不同环节间顺畅流转;以及各类传感器,用于实时监测机器人、车床及物料的状态,为整个系统...
【详情】电子元器件打磨生产线,小型精密打磨机器人对芯片、电路板等进行精细加工,对定位精度和稳定性要求极高。某...
【详情】一旦有人体不慎闯入危险区域,机器人会瞬间响应,即刻停止运行,多方位保障学生的人身安全。实训台上对工...
【详情】工业机器人项目背景与目标背景:在温州某开关元器件厂的生产流程里,机加工车床的上下料长期依赖人工操作...
【详情】一旦有人体不慎闯入危险区域,机器人会瞬间响应,即刻停止运行,多方位保障学生的人身安全。实训台上对工...
【详情】一旦有人体不慎闯入危险区域,机器人会瞬间响应,即刻停止运行,多方位保障学生的人身安全。实训台上对工...
【详情】橡胶制品的硫化成型工序,工业机器人在高温高压环境下完成橡胶模具的开合和制品取出,对设备的耐高温、耐磨...
【详情】