工业机器人保养规范工业机器人的关节减速器需每2000工作小时更换润滑脂。清洗旧油脂时应使用无纺布配合异丙醇溶剂,确保齿轮啮合面残留物≤0.03mm。谐波减速器需特别注意波发生器轴承的预紧力检测,使用扭矩扳手校准至厂商标定值的±5%范围内。线性导轨每月需进行垂直度激光检测,偏差超过0.02mm/m时应立即调整地基螺栓。控制柜内部需维持25±3℃环境温度,滤网积尘压差超过50Pa必须更换。IGBT模块散热膏每3年需重新涂抹,推荐使用道康宁TC-5126导热硅脂。备用电池组应在环境温度20℃时保持80%以上电量,电压低于3.2V/cell会丢失伺服参数。对机械臂的齿轮齿条进行维护,可减少磨损,浙江展杭保养调试,延长传动部件寿命。泉州ABB2600机器人维护保养

浙江展杭已与多家企业签订长期维修与保养合作协议,深受客户信赖。服务理念:秉承“顾客至上,精益求精”和“客户第一”的原则,提供质量服务。服务宗旨我们致力于解决企业对ABB工业机器人及工控产品依赖国外原厂维修(周期长、费用高)的痛点。我们承诺:维修时间短、修复率高、质量保证、收费合理。为企业节约成本,缩短停产周期,提高生产效率。提供快速反应的维修、保养及改造服务,质量保证,赢得客户信赖。拥有多个维修测试平台,确保维修质量,并可提供加急服务。服务流程与承诺咨询服务:随时接受技术咨询,提供技术支持与培训。收费标准:维修费不超过市场价的20-30%。配件按实际购买价格收取。签订长期维修保养合作协议的客户优先安排,享受优惠。服务响应时间:24小时内可安排专人专车上门抢修、取机。标准维修周期:3-5个工作日。加急维修:2-3个工作日。江浙沪地区:1个工作日内到达现场检测、取机、维修、安装、调试。其他省份:1-3个工作日内到达现场。验收与保修:所有出厂设备保修期1年。修复的工控产品(以设备为准)保修期3-6个月。配件保修期3-12个月。合肥ABB2600机器人售后电话发那科机器人电缆更换,杜绝信号干扰问题,有问题找浙江展杭,延长设备使用寿命。

到减速器精度检测、伺服系统性能校准,再到安全回路测试与软件系统优化,每一项流程均明确标准与时限,确保保养工作“零遗漏、**率”。保养实施期间,浙江展杭科技团队严格遵循工业安全规范与客户生产节奏,采用“错峰作业+分组并行”的模式:白天在生产线间隙完成机器人外部清洁、外观检查等基础工作,避免影响正常生产;夜间则集中开展减速器拆解检查、轴承磨损度检测等**环节,**大限度压缩停机时间。针对其中2台运行年限较长、关节部位磨损较明显的机器人,技术人员还额外增加了齿轮间隙调整、密封件更换等增值服务,并现场向客户操作人员讲解日常维护注意事项,帮助客户提升设备管理能力。“3天完成8台机器人保养,不仅效率超出预期,保养后的设备运行精度也有明显提升,完全满足我们的生产需求。”工厂设备管理部负责人表示,浙江展杭的技术能力与负责任的服务态度,为双方后续深化合作奠定了坚实基础。据了解,浙江展杭长期深耕工业机器人运维服务领域,拥有一支具备KUKA、ABB、FANUC等主流品牌机器人认证资质的技术团队,可提供设备保养、故障维修、升级改造等全链条服务。此次**完成新能源工厂保养任务,不仅展现了公司在新能源行业自动化设备服务领域的**竞争力。
电子元器件码垛生产线,小型精密码垛机器人以高速、高精度完成芯片托盘、电路板的码垛作业,直线模组和真空吸盘易出现磨损和漏气。某电子厂的码垛机器人运行 18 个月后,出现码垛位置偏移、吸盘吸力不足问题。智小航维护人员使用激光干涉仪校准直线模组精度,更换高耐磨导轨滑块,对真空系统进行氦质谱检漏,更换全氟橡胶密封圈。优化真空发生器控制逻辑,实现吸盘压力动态调节。维护后,机器人使用寿命从 3 年延长至 5 年,码垛精度提升至 ±0.1mm。系统备份和参数校准可解决累计误差问题,保持重复定位精度±0.02mm标准。

一旦有人体不慎闯入危险区域,机器人会瞬间响应,即刻停止运行,多方位保障学生的人身安全。实训台上对工作区域进行了清晰明了的划分,涵盖零部件存放区、组装操作区、成品暂存区等,学生可依照既定流程,有条不紊地开展组装工作。工作原理零部件准备:将鼠标的外壳、电路板、按键、滚轮等各类零部件,依据不同类别,有序放置在实训台的零部件存放区。每个零部件均有专属的固定位置,并配备醒目标识,方便机器人通过内置的视觉识别系统快速捕捉、精确识别,进而实现精确抓取。机器人协作组装:台机器人主要承担抓取鼠标外壳的任务。它借助内置的**视觉识别系统,能够在瞬间精确定位外壳的空间位置与姿态,随后凭借机械手臂,以极高的精度将外壳稳稳放置在组装操作区的**点位。第二台机器人则专注于抓取电路板、按键等内部零部件,依据预设的精密程序,精确调控力度与角度,将这些零部件逐一牢固安装到鼠标外壳内部。两台机器人依托实时通信技术与精妙的协同算法,实现动作的无缝衔接与紧密配合。例如,当***台机器人完成外壳放置动作后,会即刻向第二台机器人发送信号,第二台机器人接收到信号后,迅速启动零部件安装操作,有效规避了相互等待与动作相冲。检测机械臂的防护罩完整性,防止因破损失去防护作用,有问题找浙江展杭,及时修复更换。合肥ABB2600机器人售后电话
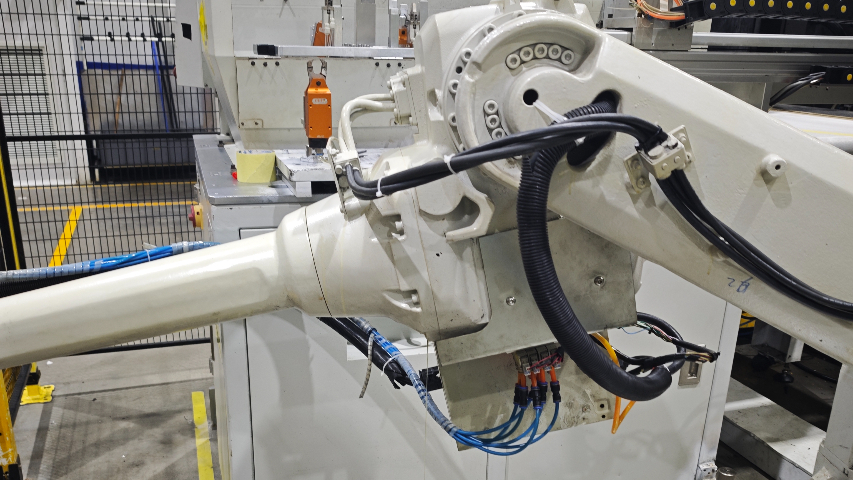
润滑系统维护能减少机械部件摩擦损耗,提高能源利用效率。泉州ABB2600机器人维护保养
机器人型号:4600配合康耐视3D视觉对小车内的产品进行有序抓取放置到输送线上。工作原理视觉识别:康耐视3D视觉系统首先对小车内的印钞产品进行扫描,获取产品的三维图像数据。然后通过图像处理算法,对图像进行分析和处理,识别出产品的位置、形状、姿态等信息,并将这些信息传输给机器人控制器。路径规划:机器人控制器根据视觉系统提供的产品信息,结合机器人的当前位置和姿态,规划出便捷的抓取路径和动作序列。在规划路径时,会考虑机器人的运动学和动力学约束,以及避免与周围环境和设备发生碰撞等因素。抓取操作:机器人按照规划好的路径和动作序列,运动到产品上方,通过末端执行器(如夹具)对产品进行抓取。在抓取过程中,机器人会根据视觉系统实时反馈的产品位置信息,对抓取动作进行微调,确保抓取的准确性和稳定性。放置输送:机器人抓取产品后,按照预设的路径将产品放置到输送线上。输送线将产品输送到下一个生产环节,完成整个拆垛和输送过程。泉州ABB2600机器人维护保养
医药行业的药品码垛生产线,机器人在洁净车间内作业,既要保证高精度码垛,又需符合 GMP 规范。某药企...
【详情】金属加工领域的激光切割车间,工业机器人在高温、高粉尘环境中执行精密切割任务。长期使用后,激光头聚焦精...
【详情】机器人型号:4600配合康耐视3D视觉对小车内的产品进行有序抓取放置到输送线上。工作原理视觉识别:...
【详情】工业机器人保养规范工业机器人的关节减速器需每2000工作小时更换润滑脂。清洗旧油脂时应使用无纺布配合...
【详情】为高效服务提供人才支撑。依托在浙江地区着力打造的“4小时服务圈”,当机器人出现紧急故障时,技术...
【详情】工艺品打磨生产线,机器人需对各类材质的工艺品进行精细打磨,对设备的灵活性和精度要求极高。某工艺品厂的...
【详情】金属加工领域的激光切割车间,工业机器人在高温、高粉尘环境中执行精密切割任务。长期使用后,激光头聚焦精...
【详情】在汽车涂装线的严苛环境中,喷涂机器人面临着多湿度、高化学腐蚀的双重挑战,维持恒压供漆与雾化均匀度成为...
【详情】电子元器件打磨生产线,小型精密打磨机器人对芯片、电路板等进行精细加工,对定位精度和稳定性要求极高。某...
【详情】食品加工上下料生产线的机器人,需要在潮湿、酸碱环境下搬运食品原料和成品,其机械结构易被腐蚀,密封部件...
【详情】陶瓷制品上下料生产线的机器人,在搬运过程中需要频繁调整姿态,其关节部位的轴承和传动齿轮易磨损。某陶瓷...
【详情】电子半导体封装车间里,高精度工业机器人承担着芯片键合的关键工序。由于生产环境要求苛刻,设备一旦出现精...
【详情】