如何根据应用场景精细选择?优先选择【直线电机模组】:速度与节拍:3C电子高速贴装、锂电池高速分切与焊接、飞秒激光加工。纳米级/微米级超高精度:半导体前道工艺、芯片封装与测试、精密视觉检测。特殊严苛环境:真空腔室、无尘洁净车间(Class100及以上)、无菌医疗环境。高稳定性与零维护:设备需要7x24小时连续运行,且无法频繁停机维护。坚定选择【滚珠丝杠模组】:垂直负载与自锁:Z轴升降、堆垛机构,可利用其自锁特性(搭配刹车)保障安全。通用自动化场景:物料搬运、自动锁螺丝、包装、一般性检测等中低速、高负载场景。严格的成本控制:项目预算有限,且在可预见的性能需求内,滚珠丝杠模组已完全胜任。高刚性、大推力:需要推动/提升数百公斤乃至吨级负载的重型自动化设备。系统会立即报警并停机,同时在触摸屏上显示其故障信息,便于快捷排除。镇江模组厂家
2、性价比高国产直线模组在满足自动化设备、生产线应用的前提下,国内直线模组的成本优势,所以国内采购的价格比国外的实惠很多。3、配合性好国产直线模组在组合时配置齐全,工控部分配合性强,高工直线模组在多轴组合时,所有配件、连接件、工控部分一步到位,省去一个部件找多家供应商的麻烦,即使使用过程部分易损部件损坏,也可以时间配合,更换部件;98%的进口产品就没法完全配合。4、服务到位进口直线模组周期固定,更换或出问题周期长,费用高,国产直线模组厂商“随叫随到”且维护费用低,能够更有效地针对行业实现个性化定制服务淮北皮带模组公司明确安装方向 .确保两台相邻的注塑机的直线模组安装方向一致,这样可以避免因方向不一致导致的问题。
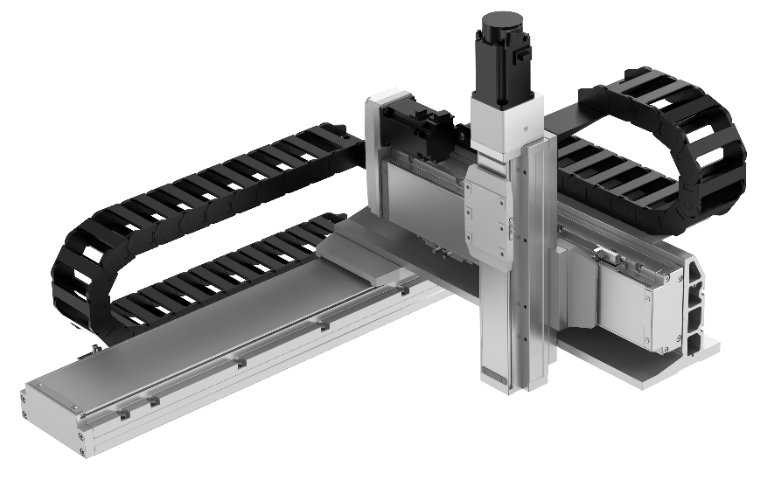
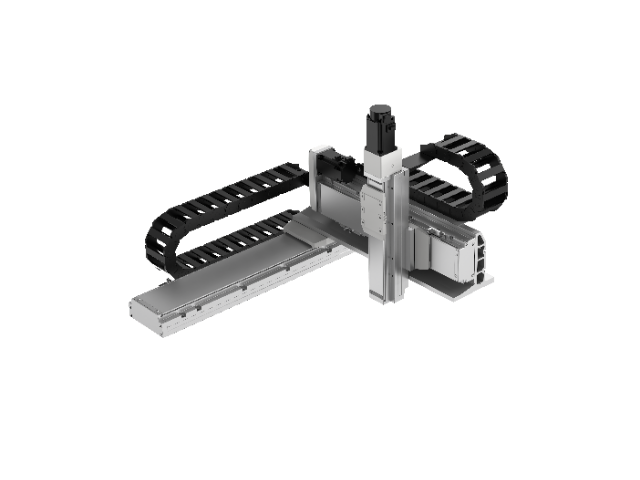
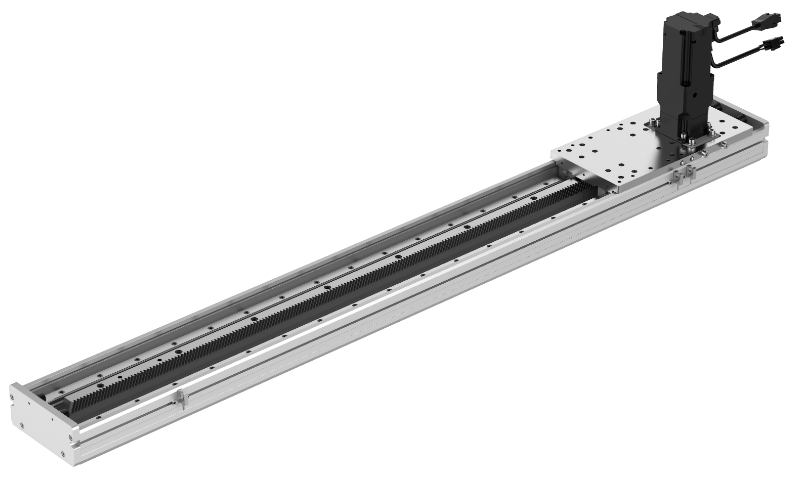
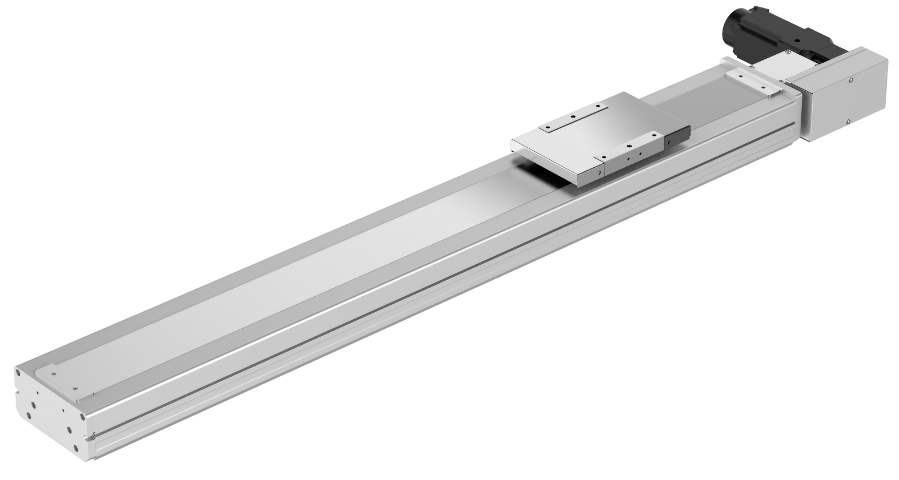
KK模组和传统丝直模组又称直线模组、工业机器人、单轴机械手等,它们是一种做往复直线运动的移动平台,把滑块、导轨、丝杆、滚珠、主体等传动部件进行精密的组装后,就集成了一个模组。这种模组的出现给生产设备工厂的工程师们带来了组装便捷的利处,还可搭建三轴四轴、十字、悬臂、龙门等型式的模组平台。KK模组KK模组主要是用主体、滚珠丝杆、滑块、马达座、尾座、刮油片等零部件组装而成,它和传统丝杆模组比较大的区别在于主体,KK是不需要导轨和四个小滑块的,而是轨道嵌入本体后再研磨,滑块直接嵌在主体轨道里面,里面有滚珠,装上伺服电机后带动联轴器,滚珠丝杆的转动来带动上方滑块,滑块就可以直接在轨道内来回做直线运动。
常见问题与应对策略滑块运动不顺畅通常是由于导轨杂质或预压过大导致,此时应及时清洁并调整预压等级。若模组运行出现异响,则需检查磨损情况并加强润滑,必要时更换相关零部件。若发现运动精度不达标,多因导轨安装不平整或控制参数设置不当。此时应重新校准导轨并优化系统参数设置,确保整体性能达到设计标准。专业服务保障高效运行作为专注于直线模组研发与生产的企业,我们不仅提供产品,更为客户提供专业的安装指导与调试服务。从选型到安装再到调试,我们的技术团队全程参与,确保每一台设备都能实现比较好性能。直线模组和注塑机的动作必须一致,既不会产生撞机也不会干涉注塑机的动作。
误区四:刚性匹配忽视动态响应某锂电池叠片机因模组刚性不足产生0.12mm振幅,导致极片对齐失败。选型时需计算系统固有频率:当驱动频率接近模组固有频率的80%时,必须更换更高刚性的型号。建议采用k=3EI/L³公式校核,确保系统刚度值≥50N/μm。多轴联动场景更需整体考量。机器人第七轴案例表明,当X轴模组刚性比Y轴高30%时,会产生17%的轨迹偏差。应通过有限元分析验证多轴刚度匹配,必要时采用加强筋结构或改变支撑跨距。误区五:忽视全生命周期成本某光伏串焊机选型时比较采购成本,未计算维护费用。进口模组5年总成本达28万,而国产模组虽然贵5万采购价,但润滑周期延长3倍,总成本反低9万。建议建立TCO模型,将能耗、保养、备件损耗纳入计算。模块化设计可降低隐性成本。某汽车厂通过选用可快速更换的导轨模组,使产线改造时间从72小时缩短至8小时。选型时应优先考虑具备快拆结构、标准化接口的产品。这种机械手能给这个行业的设备带来便利的点有:单体运动速度快、重复定位精度高。淮安皮带模组公司
首先,垂直安装会导致主要承重从导轨转移到丝杆,因此建议选择小导轨丝杆以增强推力。镇江模组厂家
直线模组定位不准调整技巧首先排查机械结构连接问题。检查模组的滚珠丝杠与电机联轴器是否松动,若存在间隙,需松开联轴器固定螺丝,重新对齐丝杠轴与电机轴(同轴度误差≤0.02mm),再按规定力矩(通常15-20N・m)紧固;查看滑块与工作台的连接螺丝是否拧紧,用扭矩扳手逐颗检查,确保无松动,避免因连接虚位导致定位偏差。其次校准脉冲参数与补偿设置。进入数控系统参数界面,核对电子齿轮比是否与模组导程、电机步距角匹配(计算公式:电子齿轮比=(导程×1000)/(电机步距角×减速比)),若参数错误需重新设定;针对定位累积误差,可通过系统的“定位补偿”功能,在特定位置设置补偿值(如在500mm处偏差0.02mm,补偿+0.02mm),多次测试后将误差控制在0.01mm以内。镇江模组厂家
苏州尚恩格科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在江苏省等地区的电工电气中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同苏州尚恩格科技公司供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!