机器人系统的组成:1.机器人主体结构:机器人主体结构主要由机器人本体、机器人控制柜、机器人控制面板组成。2.机器人控制面板:机器人控制面板,主要担负这人机对话的作用,我们对机器人的调试、操作、编程、校正等,均靠机器人控制面板来执行。3.机器人本体构成:机器人本体主要由手臂、手腕、平衡缸、连接臂、旋转台、底座组成;当然,如果其他类型的机器人会有相应的差异,我们这里主要以六轴机器人作为案例进行说明。4.机器人的轴数分类:1轴、2轴、3轴为主轴,4轴、5轴、6轴为腕部轴;我们这里是以六轴机器人作为案例说明,当然还有3轴、4轴等机器人就不在细说。5.机器人工作区域:机器人的工作区域是指,机器人在工作时,所可能需要运动的三维空间区域该工作区域内不能有固定障碍物或者机器人工作时进入临时障碍物,阻挡机器人的工作路径。联轴器自动化产线,国内机器人系统就选明光利拓智能科技有限公司!安徽销售机器人系统销售厂家

工业机器人系统控制技术的基本要求:(1)实现对工业机器人的位置、速度、加速度等控制功能,对于连续轨迹运动的工业机器人还必须具有轨迹的规划与控制功能。(2)方便的人机交互功能,操作人员采用直接指令代码对工业机器人进行作用指示。使用工业机器人具有作业知识的记忆、修正和工作程序的跳转功能。(3)具有对外部环境(包括作业条件)的检测和感觉功能。为使工业机器人具有对外部状态变化的适应能力,工业机器人应能对诸如视觉、力觉、触觉等有关信息进行测量、识别、判断、理解等功能。在自动化生产线中,工业机器人应用与其它设备交换信息,协调工作的能力。河北搬运机器人系统欢迎来电等离子喷涂设备,机器人系统就选明光利拓智能科技有限公司!

焊接机器人系统应用:焊接机器人在焊接生产中可提高焊接质量,保证焊接过程的稳定,产品的一致性;提高生产效率;减小劳动强度;满足高度柔性化生产的要求。因此,焊接机器人普遍地应用于现代制造业。主要分布在汽车制造和汽车零部件、摩托车制造、工程机械、机车车辆、家用电器等行业。作为支柱产业的汽车制造和汽车零部件行业应用更为遍及,占焊接机器人应用比例3/4。焊接机器人应用系统包含机器人技术、焊接技术及工艺装备和系统控制技术三个方面。如何合理有效的将焊接机器人应用于现代制造业的焊接生产上,要做好焊接机器人应用系统主要是结合机器人技术,根据生产要求做好焊接技术和系统控制技术的工作。
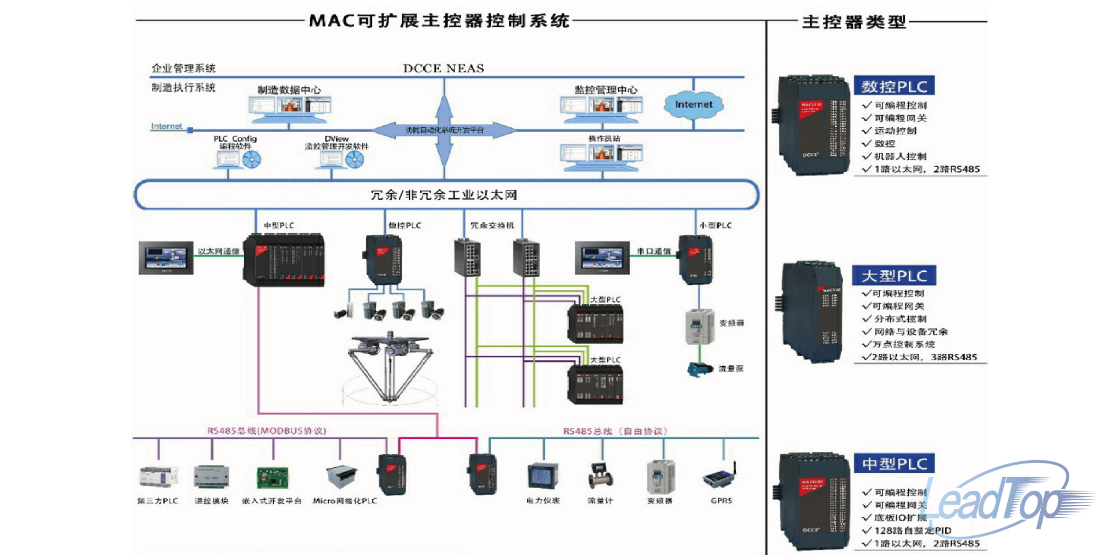
云边端一体化对机器人系统的支撑:云边端一体化构建了一个通过机器人提供多样化服务的规模化运营平台。其中,服务机器人本体是服务的实施者,而实际功能则根据服务的需要无缝地在终端计算、边缘计算和云计算之间分布和协同。机器人系统类似现在智能手机上的各种APP,主要关注如何实现高性价比的多模态感知融合、自适应交互和实时安全计算。1.多模态感知融合:为了支持机器人的移动、避障、交互和操作,机器人系统必须装备多种传感器。同时,环境里的传感器可以补足机器人的物理空间局限性。大部分数据需要在时间同步的前提下进行处理,并且调用不同复杂度的算法模块。机器人硬件系统和边缘计算需要协同来支持多传感器数据同步和计算加速,因此应该采用能灵活组合CPU、FPGA和DSA的异构计算平台。另一部分没有强实时性要求的感知任务,可以由云计算支持。远程监控界面让技术人员实时掌握系统运行状态,通过云端更新程序即可拓展应用场景。

机器人系统技术:自主导航。3、GPS全球定位系统:如今,在智能机器人的导航定位技术应用中,一般采用伪距差分动态定位法,用基准接收机和动态接收机共同观测4颗GPS卫星,按照一定的算法即可求出某时某刻机器人的三维位置坐标。差分动态定位消除了星钟误差,对于在距离基准站1000km的用户,可以消除星钟误差和对流层引起的误差,因而可以显着提高动态定位精度。4、超声波导航定位:超声波导航定位的工作原理也与激光和红外类似,通常是由超声波传感器的发射探头发射出超声波,超声波在介质中遇到障碍物而返回到接收装置。由于超声波传感器具有成本低廉、采集信息速率快、距离分辨率高等优点,长期以来被应用到移动机器人的导航定位中。而且它采集环境信息时不需要复杂的图像配备技术,因此测距速度快、实时性好。码垛系统应用于各种形状的包装成品码垛作业,机器人系统就选明光利拓智能科技有限公司!湖北码垛机器人系统参考价格
仓储机器人系统依托 AGV 集群调度算法,在智能仓库中协同完成货物分拣、搬运的全流程自动化。安徽销售机器人系统销售厂家
工业机器人系统控制应用的分类:可以从不同角度分类,如控制运动的方式不同,可为关节控制、笛卡尔空间运动控制和自适应控制;按轨迹控制方式的不同,可分为点位控制和连续轨迹控制;按速度控制方式的不同,可分为速度控制、加速度控制、力控制。1.程序控制系统:给每个自由度施加一定规律的控制作用,机器人就可实现要求的空间轨迹。2.自适应控制系统:当外界条件变化时,为保证所要求的品质或为了随着经验的积累而自行改善控制品质,其过程是基于操作机的状态和伺服误差的观察,再调整非线性模型的参数,一直到误差消失为止。这种系统的结构和参数能随时间和条件自动改变。3.人工智能系统:事先无法编制运动程序,而是要求在运动过程中根据所获得的周围状态信息,实时确定控制作用。当外界条件变化时,为保证所要求的品质或为了随着经验的积累而自行改善控制品质,其过程是基于操作机的状态和伺服误差的观察,再调整非线性模型的参数,一直到误差消失为止。这种系统的结构和参数能随时间和条件自动改变。因而本系统是一种自适应控制系统。安徽销售机器人系统销售厂家

工业机器人系统控制技术的基本要求:(1)实现对工业机器人的位置、速度、加速度等控制功能,对于连续轨迹运动的工业机器人还必须具有轨迹的规划与控制功能。(2)方便的人机交互功能,操作人员采用直接指令代码对工业机器人进行作用指示。使用工业机器人具有作业知识的记忆、修正和工作程序的跳转功能。(3)具有对外部环境(包括作业条件)的检测和感觉功能。为使工业机器人具有对外部状态变化的适应能力,工业机器人应能对诸如视觉、力觉、触觉等有关信息进行测量、识别、判断、理解等功能。在自动化生产线中,工业机器人应用与其它设备交换信息,协调工作的能力。建筑机器人系统集成 3D 打印喷头与混凝土输送泵,按 BIM 模型自动...
- 浙江取件机器人系统技术指导 2026-04-09
- 江苏MES机器人系统供应商家 2026-04-09
- 上海取件机器人系统共同合作 2026-04-09
- 广东MES机器人系统报价 2026-04-09
- 广东MES机器人系统欢迎咨询 2026-04-09
- 北京机器人系统制造厂家 2026-04-09
- 江西口碑好机器人系统厂家 2026-04-09
- 江苏通用机器人系统大概多少钱 2026-04-09
- 安徽销售机器人系统联系方式 2026-04-09
- 广东机器人系统大概多少钱 2026-04-09


- 安徽搬运机器人系统共同合作 2026-04-09
- 安徽销售机器人系统销售公司 2026-04-08
- 口碑好机器人系统销售公司 2026-04-08
- 河北销售机器人系统常见问题 2026-04-08
- 码垛机器人系统销售 2026-04-08
- 安徽搬运机器人系统值得推荐 2026-04-08



- 吉林平面口罩机全自动生产线应用 04-28
- 山西平面口罩机全自动生产线价格 04-28
- 江西装配全自动生产线售后服务 04-28
- 江西物流分拣全自动生产线定制方案 04-28
- 天津包装全自动生产线价格 04-28
- 江苏工业全自动生产线解决方案 04-28
- 浙江全自动生产线价格 04-28
- 吉林平面口罩机全自动生产线诚信合作 04-28
- 上海平面口罩机全自动生产线价格 04-28
- 云南平面口罩机全自动生产线诚信合作 04-28