焊接机器人系统的应用(一)
焊接机器人在焊接生产中可提高焊接质量,保证焊接过程的稳定,产品的一致性;提高生产效率;减小劳动强度;满足高度柔性化生产的要求。因此,焊接机器人普遍地应用于现代制造业。主要分布在汽车制造和汽车零部件、摩托车制造、工程机械、机车车辆、家用电器等行业。作为支柱产业的汽车制造和汽车零部件行业应用更为遍及,占焊接机器人应用比例3/4。焊接机器人应用系统包含机器人技术.焊接技术及工艺装备和系统控制技术三个方面。如何合理有效的将焊接机器人应用于现代制造业的焊接生产上,要做好焊接机器人应用系统主要是结合机器人技术,根据生产要求做好焊接技术和系统控制技术的工作。 智能搬运机器人系统可与MES、WCS、ERP、RFID等系统相互对接,形成整个信息流的交互。湖北**机器人系统信誉保证

工业机器人分类二:
按照控制系统的控制方式,工业机器人可分为如下几类:
点位控制机器人:只能控制从一个特定点移动到另一个特定点,而无法控制其移动路径的机器人。
连续轨迹控制机器人:能够在运动轨迹的任意热定数量的点处停留,但不能在这些特定点之间沿某一确定的路线运动。机器人要经过的任何一点都必须储存在机器人的存储器中。
可控轨迹机器人:又称作计算轨迹机器人,其控制系统能够根据要求,精确的计算出直线、圆弧、内插曲线和其他轨迹。在轨迹中的任何一点,机器人都可以达到较高的运动精度。因此,只要输入符合要求的起点坐标、终点坐标以及指定轨迹的名称,机器人就可以按指定的轨迹运行。
伺服型与非伺服型机器人:伺服型机器人可以通过某些方式(比如智能传感器)感知自己的运动位置,并把所感知的位置信息反馈回来控制机器人的运动;非伺服型机器人则无法确定自己是否已经到达指定位置。 江苏机器人系统服务电话搬运机器人系统中,装卸主要用于单件物品的小范围、定点移动和装卸作业。

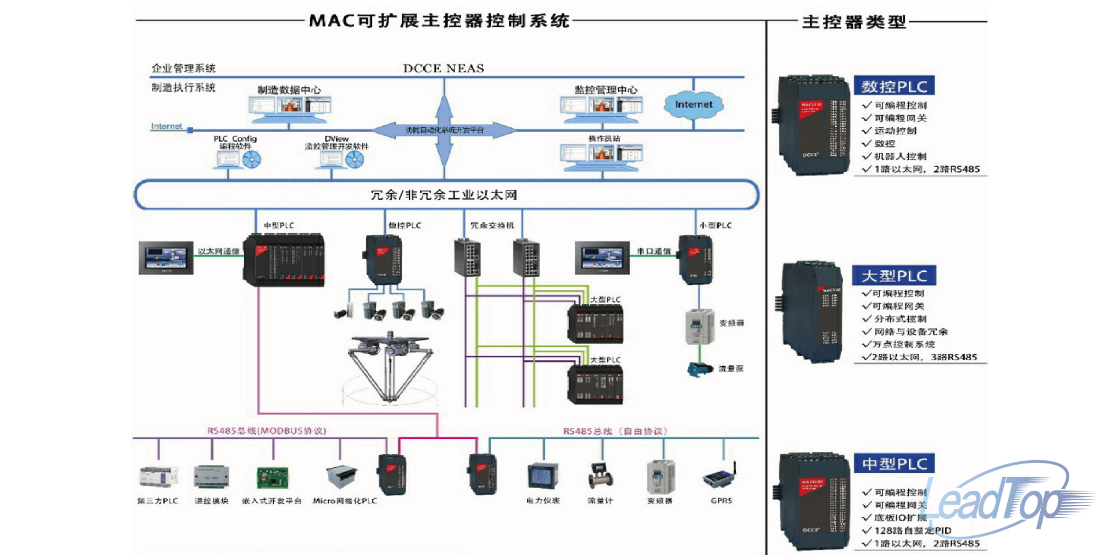
机器人系统架构
“架构可定义为组件的结构及它们之间的关系,以及规范其设计和后续进化的原则和指南。简言之,架构是构造与集成软件密集型系统的深层次设计。”系统架构也可称其为如何实施解决方案的一个策略性设计(例如基于组件的工程标准、安全)和解决方案做什么的功能性设计(如算法、设计模式、底层实现)。另外,软件工程的基本要求包括模块化、代码可复用、功能可共享。使用通用的框架,有利于分解开发任务及代码移植。机器人软件同样遵从软件工程的一般规律。说白了,架构就是你如何把机器人的功能打散,再如何把代码组织起来。一个清晰的与项目相匹配的架构直接决定了你的开发效率甚至**终功能的成败。从人类**台可编程的机器人开发伊始,架构问题就与之相伴而生。
工业机器人的发展前景如何?
工业机器人浪潮已然来袭,这是不可忽视的事实。它的到来也必将对现有的制造业造成很大的冲击。但是,这却并不意味着制造业的末日来临,而是一轮全新的产业竞争和产业转型即将展开,产业工人甚至是整个制造产业都将在浪潮中完成全新的转型。机器人上岗后降低了劳力密集度,智能机器人的应用对于传统工业来说,是一次颠覆性的变革,它改变了以往低效率的生产模式,推动了整个产业的进步。在效率高率的智能化工作模式中,机器人既可以效率高完成人力承担的工作,又可以有效排除安全问题,减少了工人出现危险情况的可能。“工业4.0”,第四次工业**的说法已经得到了很多业界人士的承认,因为智能机器人的出现确实是一次解放生产力的**,而对于未来可能实现的全自动化和全智能化,无疑将会给制造业创造出令人惊叹的生产效率和生产量。对于制造业来说,智能机器人的上岗可以提高工作效率,可以降低经营成本和带来更多的科技创新成果,使产品和服务变得更加多样化。 搬运机器人系统就选上海利拓电气有限公司!

焊接机器人系统原理
焊接机器人系统工作时 ,至少需要一个工作台 ,将工件装卡在上面 ,并运送到机器人焊接的合适位置 。
这样 ,构成了一个简单的机器人焊接系统 ,称为机器人焊接工作站 。 如果机器人组成一个焊接生产线 ,则这个系统就变得更为复杂 。
机器人要完成焊接作业 ,必须依赖于控制系统与辅助设备的支持和配合 。 完整的焊接机器人系统一般由机器人操作手 、变位机 、控制器 、焊接系统(**焊接电源 、焊***或焊钳等) 、焊接传感器 、**控制计算机和相应的安全设备等组成。 机器人系统应用在热水器全自动生产线,机器人系统就选上海利拓电气有限公司!湖北**机器人系统信誉保证
机器人系统应用在等离子喷涂设备中,机器人系统就选上海利拓电气有限公司!湖北**机器人系统信誉保证
焊接机器人系统的优点
一是每个焊点的焊接周期可大幅度降低,因为焊钳的张开程度是由机器人精确控制的,机器人在点与点之间的移动过程、焊钳就可以开始闭合:而焊完一点后,焊钳一边张开,机器人就可以一边位移,不必等机器人到位后焊钳才闭会或焊钳完全张开后机器人再移动。
二是焊钳张开度可以根据工件的情况任意调整,只要不发生碰撞或干涉尽可能减少张开度,以节省焊钳开度,以节省焊钳开合所占的时间。
三是焊钳闭合加压时,不仅压力大小可以调节,而且在闭合时两电极是轻轻闭合,减少撞击变形和噪声。 湖北**机器人系统信誉保证
上海利拓电气有限公司总部位于花桥开发区商银路1255号双联国际商务中心5幢4层,是一家 电气设备、仪器仪表、电子产品、计算机软硬件的开发、生产、销售,计算机系统集成,智能机器人的研发,机电设备安装,从事机械设备技术、自动化科技领域内的技术开发、技术咨询、技术服务、技术转让,汽车零部件、机械设备及配件、机电设备及配件、电子产品、五金交电、通信设备及相关产品(除卫星电视广播地面接收设施)、计算机、软件及辅助设备、工业自动化设备销售。的公司。利拓智能深耕行业多年,始终以客户的需求为向导,为客户提供***的机器人及自动化系统,智慧农贸系统,MES系统,智慧供排水系统。利拓智能继续坚定不移地走高质量发展道路,既要实现基本面稳定增长,又要聚焦关键领域,实现转型再突破。利拓智能创始人俞瑞富,始终关注客户,创新科技,竭诚为客户提供良好的服务。

工业机器人系统控制技术的基本要求:(1)实现对工业机器人的位置、速度、加速度等控制功能,对于连续轨迹运动的工业机器人还必须具有轨迹的规划与控制功能。(2)方便的人机交互功能,操作人员采用直接指令代码对工业机器人进行作用指示。使用工业机器人具有作业知识的记忆、修正和工作程序的跳转功能。(3)具有对外部环境(包括作业条件)的检测和感觉功能。为使工业机器人具有对外部状态变化的适应能力,工业机器人应能对诸如视觉、力觉、触觉等有关信息进行测量、识别、判断、理解等功能。在自动化生产线中,工业机器人应用与其它设备交换信息,协调工作的能力。建筑机器人系统集成 3D 打印喷头与混凝土输送泵,按 BIM 模型自动...
- 浙江取件机器人系统技术指导 2026-04-09
- 江苏MES机器人系统供应商家 2026-04-09
- 上海取件机器人系统共同合作 2026-04-09
- 广东MES机器人系统报价 2026-04-09
- 广东MES机器人系统欢迎咨询 2026-04-09
- 北京机器人系统制造厂家 2026-04-09
- 江西口碑好机器人系统厂家 2026-04-09
- 江苏通用机器人系统大概多少钱 2026-04-09
- 安徽销售机器人系统联系方式 2026-04-09
- 广东机器人系统大概多少钱 2026-04-09



- 安徽搬运机器人系统共同合作 2026-04-09
- 安徽销售机器人系统销售公司 2026-04-08
- 口碑好机器人系统销售公司 2026-04-08
- 河北销售机器人系统常见问题 2026-04-08
- 码垛机器人系统销售 2026-04-08
- 安徽搬运机器人系统值得推荐 2026-04-08


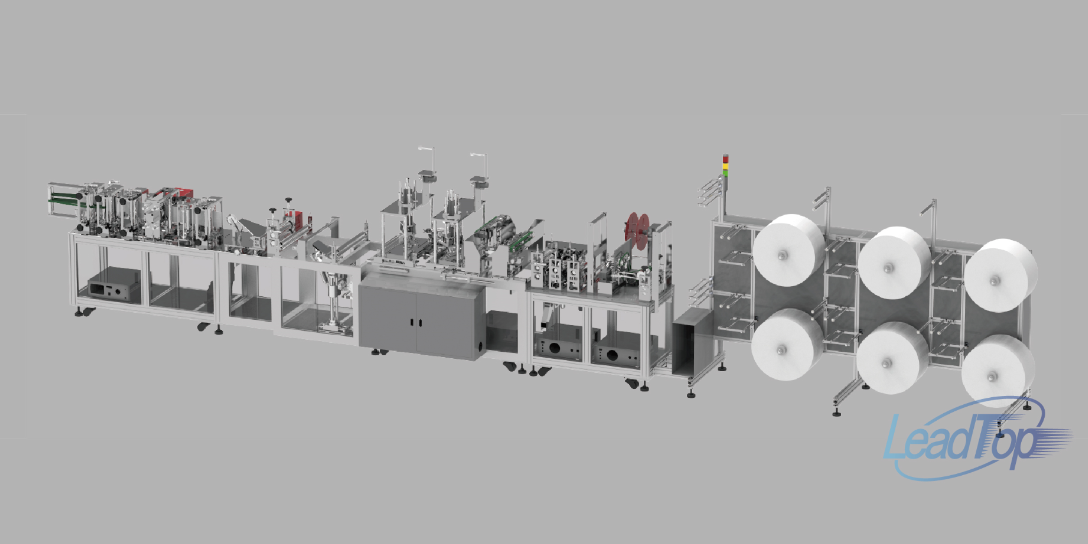

- 吉林平面口罩机全自动生产线应用 04-28
- 山西平面口罩机全自动生产线价格 04-28
- 江西装配全自动生产线售后服务 04-28
- 江西物流分拣全自动生产线定制方案 04-28
- 天津包装全自动生产线价格 04-28
- 江苏工业全自动生产线解决方案 04-28
- 浙江全自动生产线价格 04-28
- 吉林平面口罩机全自动生产线诚信合作 04-28
- 上海平面口罩机全自动生产线价格 04-28
- 云南平面口罩机全自动生产线诚信合作 04-28