机器人电缆带来更大利润空间:目前,中国机器人电缆制造业呈现"两高两低"的特点,即低技术含量、低附加值和高能耗、高污染。随着人口红利的到期,劳动力短缺和人力成本急剧上升,使得劳动力密集和低人力成本的制造模式在中国难以持续。国产机器人企业的技术水平既是国内企业能否享受行业景气的关键因素,也是推动国内工业机器人市场发展快慢的关键因素。我国机器人电缆产业链并不完善政策扶持有助行业快速发展。由于我国在基础工业的落后,使得关键零部件在精度、成本等方面与国外存在一定的差距,这也就造成我国企业并不自己生产机器人,而主要是通过对从国外采购的机器人进行系统集成,实现下游应用为主。机器人电缆,往往具有以下特征:以较优的节距设计进行绞合。日本行田机器人电缆

机器人电缆选购注意点:1、电容量:不同电缆的电容量不同,因此用户要根据自己的需求选择较合适的电缆。很多用户在选择电缆的时候,常常忽视电容量的问题,导致电缆使用出现问题,无法满足实际应用需求。因此,这里再次提醒各位,选购电缆一定要根据实际需求,确保能满足实际应用标准。2、电缆型号:电缆型号种类众多,不同类型的电缆应用效果不同,因此用户在选择电缆的时候,要根据自己使用需求标准选择较为合适的电缆,确保电缆能发挥良好的使用效果,为企业创造更多的价值。因此,大家不要忽视电缆型号选择的重要性,避免无法满足实际应用需求。原厂生产工业机器人用电缆电缆设备的保养有哪些需要注意的:查看一下设备的安全防护装置是否齐全可靠。

机器人电缆的三个优点:一、耐弯折性能优越:机器人电缆使用的耐弯折性能要优越,只有使用寿命长的电缆,才能节省资源,提高工作效率。使用寿命长的电缆对于企业来说是选择。这样才能满足使用需求。二、信号传输能力强:机器人工作主要是根据计算机发出的指令工作,然而计算机信号如何能传输到机器驱动器中,主要依靠的就是电缆。如果电缆质量好,那么传输的信号时间短并且非常准确,机器人电缆厂家认为:但是如果使用的电缆质量不好,必然会影响信号传输,无法让机器人稳定工作,执行相关指令。三、产品的耐磨性好:耐磨性好是机器人电缆必须要达到的要求,因为电缆长期移动使用会对芯线内部产生损伤。如果电缆的耐磨性不好,会影响内部的芯线传输,从而使得控制执行器无法正常使用,同时也会产生安全隐患。因此,选择使用的机器人电缆一定要具有稳定较好的耐磨性。
机器人电缆应用领域:1、高柔数据电缆:高柔数据电缆采用双层屏蔽结构,它具有较高的EMC(电磁兼容性)。具有阻燃性好、耐油、耐磨、故障率低、可靠性高等性能特点。主要应用于数据传输、工业加工、网络信号、控制系统等。2、高柔伺服/编码器电缆:高柔伺服/编码器电缆具有阻燃性好、耐油、耐腐蚀、稳定性好、使用寿命长等高性能,在伺服电机中普遍使用,可确保次浮点自动化生产线长期稳定的运行。3、高柔PUR电缆:高柔PUR电缆具有稳定的物理和化学特性,可以长期稳定的用于自动化系统中。主要适用于高速频繁的移动工作环境中。电缆网套使用要注意什么事项:防止丝股及其他部件的损坏。

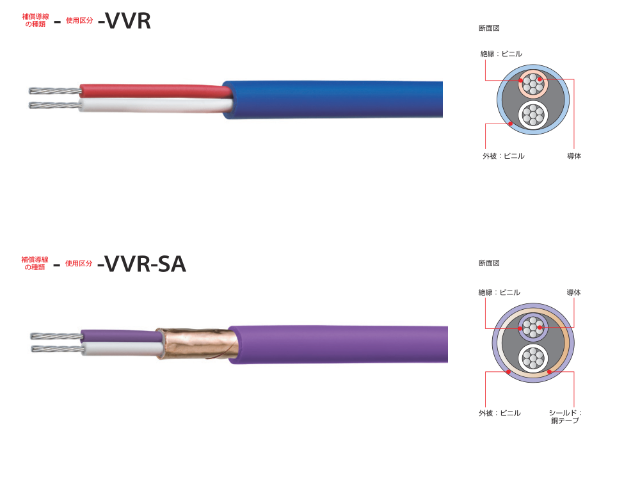
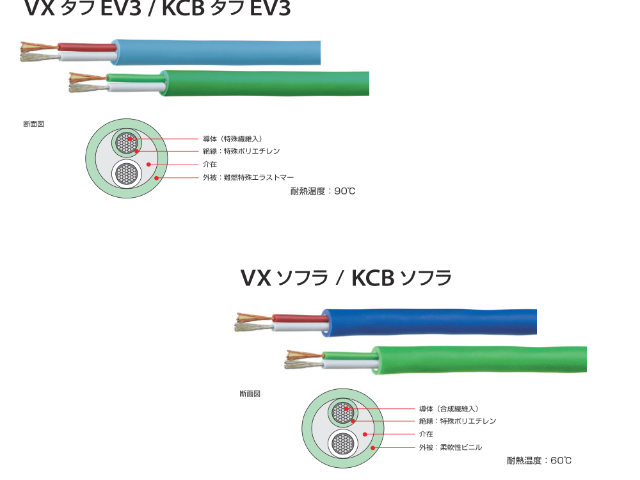
中国机器人电缆行业仍处于导入期:机器人电缆(机器人线缆)是指机器人本体、供电、信号、控制以及机器人周边用线,统称机器人电缆。机器人电缆主要应用于机器人自动化系统及工业设备、汽车生产流水线、物流搬运设备、喷涂设备、机器人手臂等要求较高的耐弯曲性、耐扭转性、耐滑动性的机器人、自动化机床等移动部位。机器人电缆根据不同应用场景可分为机器人拖地动力线、机器人本体线(机内线)、机器人编码器线、机器人伺服电机线、机器人拖链线。一般工业机器人电缆主要由7个部分构成,分别为:导体结构、芯线绝缘、抗拉元件、绞线结构、内护套、屏蔽编织层、外护套。拖链电缆安装注意事项:拖链中的电缆不得相互接触或困在一起。日本耐扭曲机器人电缆厂家
拖链电缆安装注意事项:安装半径不小电缆直径的6倍。日本行田机器人电缆
一种自动敷设隧道电缆机器人,包含控制单元、运动单元、无线传输单元、可视化单元、牵引单元和电源,所述控制单元包括上位单片机控制芯片、软程序存储模块、接口模块、指令转化模块和红外传感器探测模块,运动单元包含下位单片机、机电转换模块、直流驱动电机、齿轮和机械关节,无线传输单元包含4G(第四代移动通信技术)传输模块、通信接口和天线,可视化单元包含可视化模块和高清摄像头,牵引单元包含牵引装置和告警提示装置,可视化单元、无线传输单元、控制单元依次连接组成机器人头部,机器人头部、运动单元、电源、牵引单元呈蛇形蜿蜒形状依次排列,控制单元的上位单片机控制芯片与运动单元的下位单片机通过CAN(串行通信协议)总线互相连接,控制单元、运动单元、牵引单元分别与电源互相连接。日本行田机器人电缆