在现代智能制造环境中,机器人力控正逐步成为提升自动化作业质量的重要技术手段。通过引入达宽科技的机器人力控解决方案,企业能够在装配、打磨、插接等对接触力敏感的任务中实现更自然、更柔顺的操作体验。传统机器人往往依赖预设路径执行任务,一旦遇到位置偏差或工件差异,容易造成损伤或返工;而搭载机器人力控后,机器...
机器人力控基本参数
- 品牌
- 达宽科技,简控机器人,新蓝机器人
- 服务内容
- 软件开发,软件定制,技术开发
- 版本类型
- 普通版,增强版,标准版,测试版,单用户版
- 适用范围
- 企业用户
机器人力控企业商机
基于达宽平台级力控大脑的机器人力控熨烫座椅系统,由以下四个组成部分构成:1.机器人本体:机器人是整个系统的,负责座椅的运动和熨烫设备的控制。2.传感器:传感器用于检测座椅的形状、材质和温度,为机器人提供实时反馈信息。3.熨烫设备:熨烫设备包括熨烫板和加热元件,用于提供高温熨烫。4.达宽力控系统:力控系统负责整个过程的调整控制,确保熨烫过程安全顺利进行。为了保护价格不菲且材质优良的座椅,我们需要谨慎处理熨烫过程中的潜在损害,并确保操作的安全性。达宽力控系统通过机器人力控技术,实时监测机器人施加的力度,并在必要时减少特定方向上的力,从而避免对座椅面料施加过大的压力,防止因过度压迫而损伤座椅。机器人力控帮助生产线实现自动化,达宽科技的技术降低了生产风险,提高了整体产能。四川工业机器人力控调试
该方案能够适应各种尺寸和材质的胶塞,展现出良好的通用性和适应性。此外,通过达宽机器人力控系统能够实现自动调整以应对排气管的微小偏差,从而快速而准确地完成胶塞装配,显著提高装配的准确性和成功率。通过精确控制力,机器人力控系统可以让机器人在装配过程中施加的力始终保持在胶塞材料的承受范围内,从而避免胶塞损坏。在装配过程中,由于部件间接触的不确定性,力控传感器提供了关键的接触信息。达宽机器人力控系统利用这些信息,帮助机器人有效处理装配过程中的不确定性,减少错误,确保胶塞的正确装配。达宽科技的机器人力控装配系统具备灵活的超限报警功能,允许用户为每个监测方向设定两级报警阈值。此外,该系统还具备超限自动退出功能。一旦监测到超出设定的安全值,系统不仅会发出警报信号,还会自动中断装配流程,以确保排气管的安全。达宽科技的机器人力控软件能够调节补偿力的大小和受力上限,从而提升装配的精确度和适应性。通过灵活调整补偿力,制造商可以更好地应对市场需求的变化,快速调整生产策略,以满足多样化的产品需求。宁夏工业机器人力控打磨通过机器人力控,达宽科技提升了生产线的自动化程度,帮助企业实现生产过程的高效率。

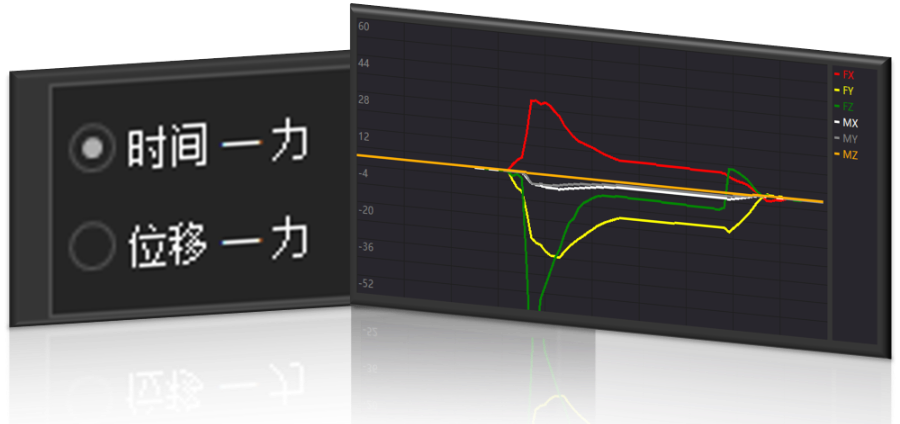
达宽科技的机器人力控软件将复杂的机器人控制和力控算法置于后台,采用直观的用户界面设计,无需复杂编程,让非专业人士也能轻松上手,大幅降低操作错误的风险。软件提供了力的波形图直观显示功能,使得用户能够实时监控力的变化情况。此外,信息栏区域能够实时反映机器人的当前位置、作用力以及运动偏移量等关键数据,让机器人控制变得更加直观、简单,同时确保了操作的精确性和效率。该系统采用高可靠性的硬件设备。使用定制的工控机,确保了强大的抗干扰能力。这使得我们的系统能够在各种实际应用场景中有效抵御外部干扰,从而提供更加稳定和精确的力控质量。我们对硬件的选择和系统的设计都经过深思熟虑,以确保长期的耐久性和可靠性。这意味着即使在持续使用的情况下,系统也能保持高性能,减少维护需求,延长使用寿命。
素材六:机器人力控提升多任务处理能力机器人力控技术能够让机器人在执行多个复杂任务时保持高效和精确。传统工业机器人通常只针对单一任务进行优化,而机器人力控通过动态调整机器人的施力和动作,使其能够在不同任务之间灵活转换,无论是精细装配、力道控制还是碰撞避让,机器人都能够根据具体需求自动调整。这种多任务处理能力极大提升了生产线的柔性和适应性。达宽科技的机器人力控系统,不仅能够应对不同类型的工作任务,还能够优化工作流程,提高生产线的整体效率和多样性,满足客户对生产灵活性和快速响应的需求。机器人力控系统有效减轻了人工操作负担,达宽科技的技术助力客户提高生产线的稳定性和安全性。

智能仓储已经成为现代物流行业的重要组成部分,机器人力控技术在这一领域的应用越来越。通过精细控制机器人的施力,机器人力控可以确保在搬运和堆垛过程中精确控制每一物品的姿态和位置,从而避免因操作不当而导致货物损坏或误放。机器人力控还可以帮助机器人适应不同类型的物品,无论是重量较重的物品,还是外形特殊的物品,机器人都能够根据需要自动调整施力,进行精确搬运。达宽科技的机器人力控系统,为智能仓储提供了强大的技术支持,提升了仓储系统的自动化和智能化水平,减少了人工干预,提高了仓储效率和安全性。达宽科技提供的机器人力控技术帮助企业降低了生产过程中的风险,确保了生产操作的安全性。上海工业机器人力控
机器人力控能够有效提升生产自动化水平,达宽科技的技术方案让企业在降低成本的同时,提升产品一致性。四川工业机器人力控调试
本文我们将以KUKA工业机器人为例,介绍如何基于达宽平台级机器人力控大脑装配汽车ECU控制器插头35p线束。首先,使用工具坐标系精确示教线束接口的初始位置。35针脚连接器因其众多的针脚和较大的接触面积,在传统装配过程中会产生较大的干扰外力。这不仅要求机器人具有极高的装配精度,而且装配过程中的干扰外力也可能造成影响。例如,在装配过程中,如果因来料误差等原因,机器人施加过大的力量,有损坏连接器的风险。如何在不损坏连接器的前提下,精确地将线束连接到指定位置?在测试过程中,我们发现依赖位置判断可能导致在工装偏移或误差时损坏连接器。而依赖力判断可能因干扰外力误判而认为已到达指定位置,但这种方法能确保连接器不受损害,提升安全性。因此,结合位置和力的双重判断是更为稳妥的解决方案。四川工业机器人力控调试
与机器人力控相关的文章
机器人力控精密装配
- 北京机器人力控推荐 2026-02-11
- 北京协作机器人力控软件 2026-02-11
- 江苏工业机器人力控 2026-02-11
- 安徽机器人力控技术指导 2026-02-11
- 中国澳门协作机器人力控调试 2026-02-11
- 安徽机器人力控测试 2026-02-11
- 天津协作机器人力控系统 2026-02-07
- 中国澳门协作机器人力控优点 2026-02-07
- 中国台湾机器人力控 2026-02-07
- 贵州协作机器人力控供应商 2026-02-07
- 工业机器人力控调试 2026-02-07
- 贵州机器人力控装配 2026-02-07
与机器人力控相关的产品


与机器人力控相关的新闻
-
中国澳门机器人力控报价 2026-02-01 22:05:42在自动化装配领域,机器人力控系统发挥着关键作用,特别是在行星齿轮装配中。达宽力控系统通过实时监测和调整施加的力,确保装配过程平稳可靠。对于行星齿轮这样的精密组件,传统方法可能因手动操作而引入不稳定因素,但达宽力控系统能自动补偿微小偏差,提升整体装配质量。达宽科技作为行业先驱,开发的力控系统集成了先进...
-
机器人力控 2026-01-31 03:04:28产品一致性是行星齿轮装配的要求,达宽机器人力控在此发挥关键作用。传统装配中,机器人缺乏力觉反馈,易出现齿轮啮合过紧导致运转异响,或过松影响传动精度的问题。达宽科技的机器人力控系统通过预设合理的力值区间,实时监测装配过程中的力觉变化。当齿轮开始啮合时,系统控制机器人输出稳定力度,确保齿面均匀接触,避免...
-
辽宁工业机器人力控优势 2026-01-30 14:04:55随着精密制造行业的发展,机器人力控在齿轮装配领域的应用场景不断延伸。无论是小型精密齿轮的装配,还是大型传动齿轮的对接,机器人力控都能凭借其灵活性与适应性满足多样化需求。达宽科技持续深耕机器人力控技术创新,针对不同齿轮装配场景的工艺特点,提供定制化解决方案,助力企业实现机器人在更多精密装配任务中的高效...
-
湖南工业机器人力控抛光 2026-01-30 16:04:56达宽科技的机器人力控表面处理方案,为用户提供一站式解决方案,无缝整合到现有机器人系统中,实现任务优化。该方案基于模块化设计,支持快速部署,帮助用户节省调试时间并提高处理效率。机器人力控的在于其自适应能力,能根据不同表面特性调整参数,确保一致输出。达宽科技通过专业支持和持续更新,让机器人力控易于维护,...
与机器人力控相关的问题
新闻资讯
产品推荐
-

中国台湾抓取力控系统优点
2026-02-10 -

湖北智能柔性力控系统定制
2026-02-10 -

河南工业机器人力控系统方案
2026-02-10 -

广东高精度力控系统软件
2026-02-10 -
广西协作机器人装配线
2026-02-10 -

江苏达宽科技力控系统配置
2026-02-10 -

吉林柔性力控装配线束
2026-02-10 -

中国台湾检测力控系统报价
2026-02-10 -
河南抓取力控系统供应商
2026-02-10