企业商机
首页 > 企业商机
首页 > 企业商机

成功部署一套瑕疵检测系统是一个系统工程,而非简单的设备采购。典型的实施流程包括:需求分析(明确检测对象、缺陷类型、速度、精度、环境等关键指标);方案设计与可行性验证(通过实验室打样,确定硬件选型和**...
我们的定制视觉检测服务,始终以客户为中心,致力于提供品质支持。从服务启动之初,我们便摒弃 “一刀切” 的通用模式,组建专属项目小组深入客户生产现场,与技术、生产、质检等多部门人员沟通,了解客户的品质目...

引入自动化瑕疵检测系统是一项重要的资本投入,企业决策者必然关注其投资回报率。系统的直接成本包括硬件(相机、镜头、光源、传感器、工控机、机械框架)、软件授权或开发费用,以及安装调试和后期维护的成本。而其...

自动化瑕疵检测系统不仅是一个“筛选工具”,更是数字化质量管理体系的核心数据入口。现代系统强调检测结果的标准化记录和全过程可追溯。每一次检测,系统不仅输出“合格/不合格”的判定,还会将原始图像、缺陷特征...

许多瑕疵不仅体现在表面纹理或颜色上,更表现为几何尺寸的偏差或三维形状的异常。2D视觉在测量高度、深度、平面度、体积等方面存在局限,而3D视觉技术提供了解决方案。主流的3D成像技术包括:1)激光三角测量...

随着瑕疵检测系统在制造业中的广泛应用,建立统一的行业标准和认证体系变得至关重要。标准化不仅确保了不同系统之间的兼容性与可比性,也为企业选型和验收提供了客观依据。目前,国际标准化组织(ISO)和各类行业...

对于在线检测系统而言,“实时性”是关键生命线。它意味着从图像采集到输出控制信号之间的延迟必须严格小于产品在两个工位间移动的时间窗口,否则检测将失去意义。提升处理速度是一项技术挑战。硬件上,采用高性能工...
全自动检测并非在所有场景下都是比较好解。人机协作正在催生新型的、效率更高的质检模式。一种常见模式是“机器筛查,人工复判”:系统高速筛选出所有可疑品(包括确定瑕疵品和不确定品),再由人工集中对可疑品进行...
瑕疵检测系统是现代工业自动化与质量控制体系中的关键组成部分,它是一种利用先进传感技术、图像处理、人工智能算法等手段,自动识别产品或材料表面及内部缺陷的综合性技术系统。其**目标在于替代传统依赖人眼的主...
我们的定制视觉检测,为您的企业提供个性化的品质支持。每个企业的生产模式、产品特性与品质目标都存在差异,通用检测服务难以满足个性化需求。我们会深入了解您企业的发展战略、市场定位以及当前面临的品质痛点,在...

随着产品结构的日益复杂和精度要求的不断提升,凭2D图像信息已无法满足所有检测需求。3D视觉技术在瑕疵检测中的应用正迅速增长。通过激光三角测量、结构光或飞行时间(ToF)等原理,3D传感器能快速获取物体...

专业的定制视觉检测,为您的生产线提供持续的品质支持。我们的服务并非一次性的方案交付,而是长期的品质陪伴。生产线运行过程中,若出现产品规格调整、生产工艺优化等情况,我们会在 48 小时内完成检测方案的调...

为确保瑕疵检测系统在数年生命周期内持续稳定运行,建立完善的维护与校准制度至关重要。日常维护包括清洁光学部件(镜头、保护镜、光源)表面的灰尘和油污,检查机械安装的紧固性,备份系统参数和程序。定期校准则是...

随着产品结构的日益复杂和精度要求的不断提升,凭2D图像信息已无法满足所有检测需求。3D视觉技术在瑕疵检测中的应用正迅速增长。通过激光三角测量、结构光或飞行时间(ToF)等原理,3D传感器能快速获取物体...
定制视觉检测服务,让您的产品检测更加科学、严谨。科学的检测方法与严谨的检测标准是确保检测结果有效的关键。我们在设计定制视觉检测方案时,会依据相关行业标准与科学原理,结合您产品的特性,制定科学的检测流程...
电子元器件生产具有高精度、高速度、高集成度的特点,生产线上的产品检测必须争分夺秒且准确无误。熙岳智能针对电子行业的特殊需求,精心研发制造了的视觉检测设备。该设备搭载了超高速数据处理芯片和优化的图像处理...
自动化瑕疵检测系统不仅是一个“筛选工具”,更是数字化质量管理体系的核心数据入口。现代系统强调检测结果的标准化记录和全过程可追溯。每一次检测,系统不仅输出“合格/不合格”的判定,还会将原始图像、缺陷特征...
早期的瑕疵检测系统严重依赖传统的机器视觉技术。这类方法通常基于预设的规则和数学模型。例如,通过像素值的阈值分割来区分背景与前景,利用边缘检测算子(如Sobel、Canny)来定位轮廓异常,或通过傅里叶...
深度学习瑕疵检测系统通常采用几种主流的网络架构。在分类任务中,如判断一个产品图像整体是否合格,会使用ResNet、VGG等图像分类网络。更常见且更具价值的是定位与分割任务,这就需要用到更复杂的模型。例...
瑕疵检测的应用远不止电子行业。在纺织业,系统能实时检测布匹的断经、纬疵、污渍、色差、孔洞等,速度可达每分钟数百米,并通过深度学习识别复杂的纹理瑕疵。在金属加工(如钢板、铝箔、汽车板)中,系统检测裂纹、...
专业的定制视觉检测,为您的产品提供品质保障。我们的专业性体现在对行业标准的深刻理解与技术的应用上。团队成员均具备 5 年以上机器视觉行业经验,熟悉各行业品质标准,如医疗器械需符合 FDA 相关要求,汽...
软件是瑕疵检测系统的“大脑”,其平台化、易用性和开放性成为核心竞争力。现代检测软件平台(如基于Halcon, VisionPro, OpenCV或自主开发的框架)不仅提供丰富的图像处理工具库,更集成了...
为确保瑕疵检测系统在数年生命周期内持续稳定运行,建立完善的维护与校准制度至关重要。日常维护包括清洁光学部件(镜头、保护镜、光源)表面的灰尘和油污,检查机械安装的紧固性,备份系统参数和程序。定期校准则是...

“没有好的光照,就没有好的图像”,这是机器视觉领域的金科玉律。照明设计的目标是创造出一种成像条件,使得感兴趣的瑕疵特征与背景之间产生比较大化的、稳定的对比度,同时抑制不相关的干扰。设计过程需要综合考虑...
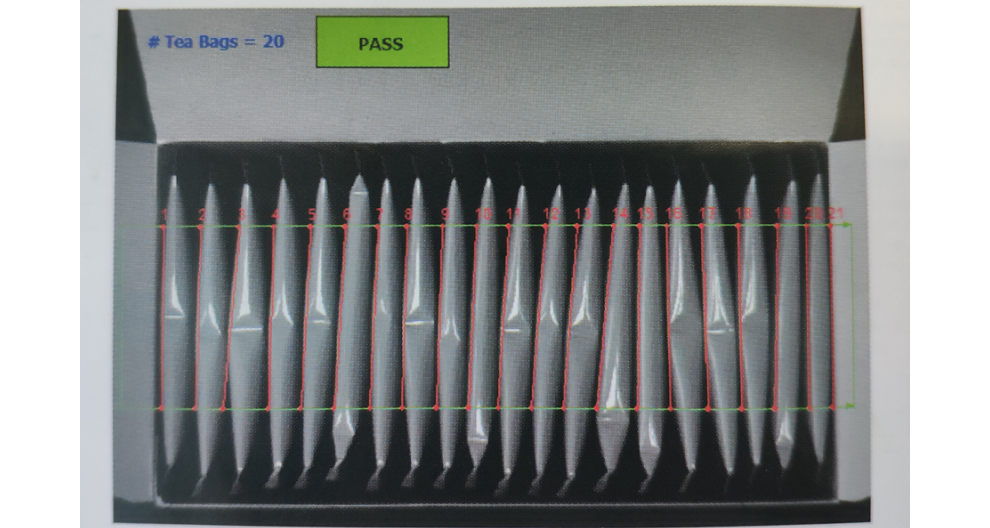
许多工业瑕疵*凭可见光成像难以发现,或者需要获取物体内部或材料成分的信息。因此,融合多种传感模态的检测系统应运而生。例如,X射线成像能够穿透物体,清晰显示内部结构缺陷,如铸件的气孔、缩松,电子元件的焊...
机器视觉是瑕疵检测系统的“眼睛”与“初级大脑”,它通过光学成像系统获取目标的数字图像,并利用计算机进行处理与分析,以提取所需信息。一个典型的机器视觉检测单元包括照明系统、镜头、工业相机、图像采集卡(或...
许多工业瑕疵*凭可见光成像难以发现,或者需要获取物体内部或材料成分的信息。因此,融合多种传感模态的检测系统应运而生。例如,X射线成像能够穿透物体,清晰显示内部结构缺陷,如铸件的气孔、缩松,电子元件的焊...

对于在线检测系统而言,“实时性”是关键生命线。它意味着从图像采集到输出控制信号之间的延迟必须严格小于产品在两个工位间移动的时间窗口,否则检测将失去意义。提升处理速度是一项技术挑战。硬件上,采用高性能工...
电子元器件生产具有高精度、高速度、高集成度的特点,生产线上的产品检测必须争分夺秒且准确无误。熙岳智能针对电子行业的特殊需求,精心研发制造了的视觉检测设备。该设备搭载了超高速数据处理芯片和优化的图像处理...
3C 产品(计算机、通信和消费电子产品)市场竞争激烈,产品质量直接影响企业的市场份额和品牌形象。3C 产品生产过程中,零部件微小瑕疵的检测难度大,且对检测效率要求极高。熙岳智能凭借在视觉检测领域的专业...
2026.03.17 江苏木材定制机器视觉检测服务制造价格
2026.03.17 浙江密封盖定制机器视觉检测服务用途
2026.03.17 南通电池瑕疵检测系统用途
2026.03.17 福建冲网定制机器视觉检测服务技术参数
2026.03.17 嘉兴铅板瑕疵检测系统趋势
2026.03.17 连云港铅酸电池瑕疵检测系统品牌
2026.03.17 上海铅板瑕疵检测系统公司
2026.03.17 广东冲网定制机器视觉检测服务价格低
2026.03.17 无锡木材瑕疵检测系统优势
2026.03.17 天津线扫激光瑕疵检测系统产品介绍
2026.03.17 盐城密封盖瑕疵检测系统服务价格
2026.03.17 常州密封盖瑕疵检测系统公司
2026.03.17 四川电池瑕疵检测系统供应商
2026.03.17 徐州密封盖瑕疵检测系统趋势
2026.03.16 山东铅板瑕疵检测系统私人定做
2026.03.16 徐州线扫激光瑕疵检测系统定制价格
2026.03.16 冲网瑕疵检测系统按需定制
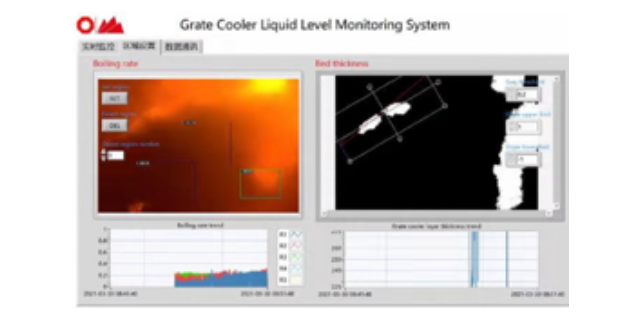
2026.03.16 南京篦冷机工况瑕疵检测系统优势
2026.03.16 扬州零件瑕疵检测系统定制
2026.03.16 河南篦冷机工况定制机器视觉检测服务