
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
实现车身漆面缺陷自动检测系统非常重要。缺陷检测一直是计算机视觉领域的研究热点。通过计算机视觉知识的使用,可以有效、准确地实现缺陷区域的检测和分类。目前,计算机视觉在车身漆膜缺陷检测方面有很多成熟的研究。,选择了感兴趣的区域,并标记了它们,以实现缺陷位置的准确检测。还有的研究者使用局部二值模式(LBP)和局部方差(VAR)算子的旋转不变性度量的联合分布来检测和定位人**绘中的缺陷。,然后根据局部方向模糊方法检测整个照明区域的缺陷。。选择多个几何特征和灰度特征作为缺陷特征参数,用于SVM分类和识别。通过深度学习方法对输入图像集进行训练,并且可以使用检测模型来检测缺陷图像。在缺陷检测中,深度学习也有很大的贡献。吴松林等人提出了一种基于Siam网络的按钮缺陷相似度检测方法。利用专门设计的损失函数Siam网络,实现了自动样本提取和相似度测量,并将其应用于实际的机器视觉系统。HuijunHuet等人结合缺陷目标图像提取三种图像特征:几何特征,灰度特征和形状特征,并使用支持向量机对钢带的表面缺陷进行分类。(TDDnetwork),它利用深度卷积网络固有的多尺度金字塔结构来构造特征金字塔,以提高PCB缺陷检测性能。。随着人工智能的爆发,机器视觉,有望迎来更大发展,在各个领域掀起新的风暴!全自动汽车面漆检测设备生产厂家
汽车面漆检测设备
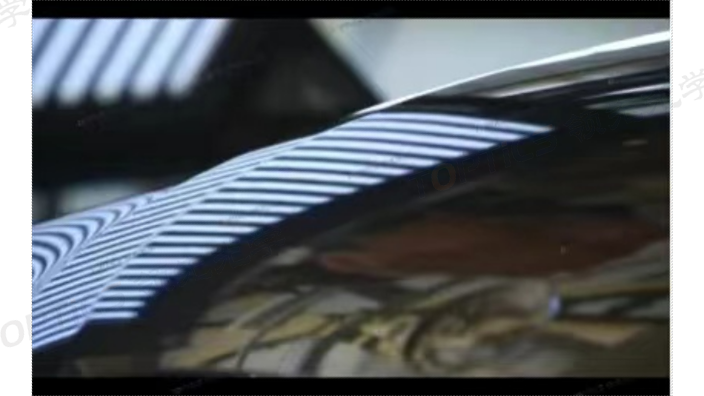
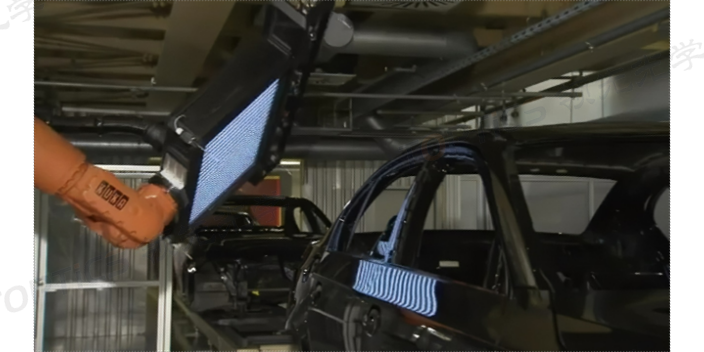
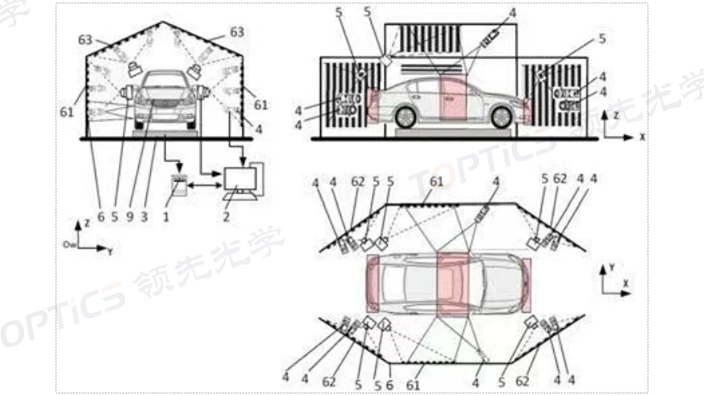
包括四套检测机械手臂、四套漆面视觉检测模组;检测时,被检测汽车移动至检测区域后,四套检测机械手臂分别带动固定在检测机械手臂前端的四套漆面视觉检测模组依据汽车表面轮廓定位检测划分规划得到的采样点,进行汽车表面的全范围成像,成像后通过汽车漆面图像处理提取汽车漆面表面外观缺陷。所述的漆面视觉检测模组包括:n套成像镜头相机组、防护外壳、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板;n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板均刚性固定在防护外壳上;且n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板自上而下安装,多套成像镜头相机组、三个测距传感器自左而右均匀分布,大尺寸条纹投影屏设置在多套成像镜头相机组和三个测距传感器之间,均匀漫射发光板设置在三个测距传感器下端。所述的n取值为3时为比较好,三套成像镜头相机组、三个测距传感器自左而右均匀分布,且每套成像镜头相机组与每个测距传感器上下位置对称。所述的汽车表面轮廓定位检测划分规划:通过读取汽车3d模型,将模型分割为多个离散点,再依据n套成像镜头相机组的物方成像视场大小进行离散点的剔除、筛选。抚顺代替人工汽车面漆检测设备价格我们的设备可实现全自动检测,检出率高达99%。
此时所述机身再所述顶压弹簧作用下上移。进一步地,所述传动装置包括所述传动腔顶壁内设置的齿轮腔,所述齿轮腔与所述传动腔之间转动设置有第二转轴,所述第二转轴顶部末端转动设置于所述转动腔顶壁内,所述第二转轴内设置有上下贯通的贯通孔,所述传动腔内的所述第二转轴底部末端固定设置有与所述螺纹套外表面固定设置的diyi锥齿轮啮合的第二锥齿轮,所述齿轮腔内的所述第二转轴外表面固定设置有diyi齿轮,所述齿轮腔内可转动的设置有与所述齿轮腔底壁内固定设置的第二电机动力连接的第三转轴,所述齿轮腔内的所述第三转轴外表面固定设置有与所述diyi齿轮啮合的第二齿轮,所述第三转轴顶部末端伸入所述转动腔顶壁内开口向下设置的凹槽内,所述凹槽内的所述第三转轴末端固定设置有与所述凹槽端壁上固定设置的内齿圈啮合的第三齿轮。进一步地,所述联动装置包括所述机身顶壁内设置的转动腔,前后两个所述diyi转轴均贯穿所述转动腔且所述转动腔内的所述diyi转轴外表面固定设置有限位块,所述转动腔内可转动的设置有与前后两个所述蜗轮均啮合的蜗杆,所述转动腔顶壁内可转动的设置有与所述手动轮固定连接的第四转轴。
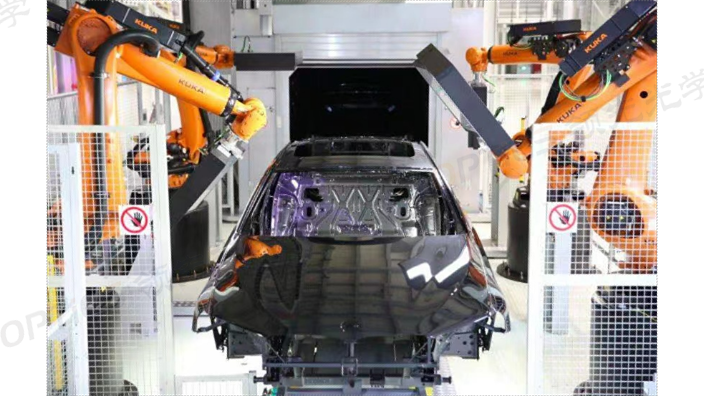
图像处理单元通过使用一系列算法对图片进行处理,获得缺陷3D或2D特征,通过与数据库比对之后,获得缺陷位置、分类、尺寸等信息,然后将数据进行输出。漆膜缺陷自动检测系统构成汽车车身长度一般在~m,宽度在~m,而且车身曲面多,结构比较复杂。为了能将车身外表所有区域都覆盖到,需要增加光源和相机数量或者将光源和相机安装在机器人等可移动设备上,目前研究和应用较多的主要有以下2种结构:1)将光源和CCD相机安装到包围车身的钢结构框架上,通过增加光源和CCD相机数量的方式覆盖整个车身。这种结构的优点是结构简单,调试时只需要调整相机角度,耗时短。缺点是柔性低,不同的车型外形有较大差异时不能通用。2)将光源和CCD相机集成到布置在车身两侧的机器人手臂上,使用2台以上的机器人,可以增加行走轨道扩大检测区域。此结构优点是机器人相对灵活,对车身外表任何区域都可以进行拍摄,柔性高,不同车型可混线检测。缺点就是系统结构复杂,检测一台车的时间相对第一种结构要长。能在40~60JPH的涂装生产线上,用来检测直径mm的缺陷。4台机器人并联使用,每台机器人都安装了1个大尺寸的显示器和4台200万像素的相机,每台相机在一个检测位置会拍摄8张图像。为绚彩涂装安装智慧大脑,不断开启技术创新新局面。
基于计算机视觉的表面缺陷自动检测作为一种快速发展的新型检测技术,具有速度快、效率高等优点,已经成功应用到多个行业。将其应用到汽车车身漆膜缺陷检测领域,可改变现在人工检测耗时过长、一次检出率低等缺陷,同时可以降低人工成本。主要介绍了漆膜缺陷自动检测技术的原理、特点,以及在一些生产线中的应用实例,总结了现状及存在的问题,并对其应用前景做了展望。汽车涂装是汽车生产过程中重要的一个环节,主要为汽车提供外观装饰性和长期的防腐蚀性能。常规的汽车涂装过程中,喷涂后的车身需要进行漆膜表面的缺陷检测和修饰。目前,喷涂后车身漆膜检测主要通过人工目视的方法完成,存在耗时过长、效率低下及受人为因素影响等缺点,是制约涂装车身质量的关键因素之一。随着光电、自动化和计算机图像处理技术的发展,计算机视觉在不同工业部门得到了大量的应用。比如基于计算机视觉的表面缺陷自动检测技术已经大量地应用在织物表面、食品表面、钢表面、瓷砖表面以及多晶硅太阳能电池表面检测等领域。近几年,表面缺陷自动检测技术开始在汽车车身漆膜缺陷的检测领域发展,并且已经开始在一些汽车公司测试与应用。与传统的人工检测方法相比。我们的检测系统改变了现在人工检测耗时过长、一次检出率低等缺陷,同时可以降低人工成本。鞍山汽车面漆检测设备生产厂家
漆面缺陷检测系统可实现不同车型油漆车身表面缺陷的自动化检测。全自动汽车面漆检测设备生产厂家
该模型将每个标签学习定义为二进制任务,以应对多标签学习问题。,然后使用VGG网络来训练和识别缺陷位置。还有的研究者提出了一种帧间注意策略和帧间深度卷积神经网络来检测输入的X射线图像中的缺陷,从而有效地提高了检测精度。还有的研究者提出了一种基于YOLOV2的色织疵点自动定位与分类方法。在收集了276个色织的织物缺陷图像并进行预处理之后,使用YOLO9000,YOLO-VOC和TinyYOLO构建了织物缺陷检测模型。,然后将不平坦的表面划分为潜在的缺陷区域,并使用神经网络对缺陷区域进行识别和分类。。与原来的SSD算法相比,精度有效提高。,并将CNN与mobilenetSSD结合在一起,有效地实现了对容器密封表面上的裂缝,凹痕,边缘和划痕的实时,准确检测。尽管深度学习方法在目标检测中表现出色,但它并不是特定领域的综合内容。到目前为止,关于汽车车身漆膜缺陷检测的研究还很少。本文提出了一种改进的MobileNet-SSD的车身涂料缺陷检测算法。首先,提出了一种数据增强方法来扩展在生产车间中收集的车身漆膜缺陷图像,并改进了传统SSD算法的网络结构和匹配策略。以MobileNet代替vgg16作为SSD的基本网络,实现了汽车车身漆膜缺陷的自动检测,有效提高了检测速度和准确性。全自动汽车面漆检测设备生产厂家
领先光学技术(江苏)有限公司成立于2019年,公司总部地址位于武进区天安数码城内独栋12-2#写字楼。我们的种子企业“ling先光学技术(常熟)有限公司”成立于2014年,是国家高新技术企业、科技型中小型企业、江苏省民营科技企业、雏鹰企业。知识产权80余项(发明专利8项)。内核团队:教授2名、博士2名、行业渠道关键人4人。长期稳定与复旦大学、大连理工大学合作。底层技术包括:光学(相位偏折、白光干涉、白光共焦、深度学习);MicroLED(发光器件、透明显示、微型投影)。是做一件“利用光学进行工业质量检测设备的生产和制造”。自主开发光学系统和底层内核算法,拥有十年以上行业经验,主要应用于:汽车玻璃检测行业、片材检测行业、半导体材料检测行业,我们的战略新产品:微米级光刻机已经完成版流片,也正在一步步趋于稳定和成熟。公司在科技的浪潮中,已经具有将内核技术转化为产品的经验与能力。公司是高科技、高成长性企业,公司不断的夯实自身技术基础,愿成为中国工业发展中奠基石的一份子,打破国外的智能装备的,树名族自有高技术品牌。

且n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板自上而下安装,多套成像镜头相机组、三个测距传感器自左而右均匀分布,大尺寸条纹投影屏设置在多套成像镜头相机组和三个测距传感器之间,均匀漫射发光板设置在三个测距传感器下端。所述的n取值为3时为比较好,三套成像镜头相机组、三个测距传感器自左而右均匀分布,且每套成像镜头相机组与每个测距传感器上下位置对称。所述的汽车表面轮廓定位检测划分规划:通过读取汽车3d模型,将模型分割为多个离散点,再依据n套成像镜头相机组的物方成像视场大小进行离散点的剔除、筛选。耐久性测试旨在评估汽车面漆在各种环境条件下的长期保护性能。江苏代替人工汽车面漆检测设...
- 合肥代替人工汽车面漆检测设备哪家好 2024-12-28
- 蚌埠高精度汽车面漆检测设备供应商 2024-12-28
- 孝感光学方法汽车面漆检测设备推荐厂家 2024-12-28
- 河北工业质检汽车面漆检测设备价格 2024-12-28
- 鞍山代替人工汽车面漆检测设备推荐厂家 2024-12-28
- 山东代替人工汽车面漆检测设备价格 2024-12-28
- 洛阳偏折光学法汽车面漆检测设备 2024-12-28
- 襄阳工业质检汽车面漆检测设备生产厂家 2024-12-28
- 安徽汽车面漆检测设备生产厂家 2024-12-28
- 上海非隧道式汽车面漆检测设备 2024-12-28


- 开封代替人工汽车面漆检测设备哪家好 2024-12-27
- 九江高精度汽车面漆检测设备价格 2024-12-27
- 太原代替人工汽车面漆检测设备推荐厂家 2024-12-27
- 漳州全自动汽车面漆检测设备供应商家 2024-12-27
- 南平工业质检汽车面漆检测设备价格 2024-12-27
- 淮南代替人工汽车面漆检测设备价格 2024-12-27




- 鞍山代替人工汽车面漆检测设备推荐厂家 12-28
- 山东代替人工汽车面漆检测设备价格 12-28
- 扬州高精度配镜机器人推荐厂家 12-28
- 洛阳偏折光学法汽车面漆检测设备 12-28
- 襄阳工业质检汽车面漆检测设备生产厂家 12-28
- 安徽汽车面漆检测设备生产厂家 12-28
- 上海非隧道式汽车面漆检测设备 12-28
- 浙江光学算法配镜机器人价格 12-28
- 苏州代替人工配镜机器人价格 12-28
- 泉州工业质检汽车面漆检测设备哪家好 12-28