
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
机器视觉缺陷检测是基于缺陷库的比对和匹配来判别缺陷是否超出要求,缺陷检测需要建被检测物品的缺陷库,并通过快速比对实物与缺陷库来代替人眼作出是否合格的判别。缺陷检测需要尽可能大的光学视场,以能分辨出小缺陷要求为极限分辨率的标准(由于人眼的极限分辨率是0.1mm,因此,缺陷检查一般需要挑出大于0.1mm,可能大的光学视场,即尽可能小的光学倍率和尽量大的景深水提高效率,这与尺寸测量的要求正好相反。机器視觉检测系统基于高分辨率工业相机和视觉软件,可对产品进行外观检测、尺寸测量、角度测量、字符识别等。缺陷检测系统可根据用户需求及设定的技术指标要求自动进行检测,并对有缺陷部位进行标识,或者根据需要自动分拣、剔除,为行业检测提供比较好解决方案,提高系统的自动化程度。实现实时和高精度检测。莆田汽车面漆检测设备生产厂家
汽车面漆检测设备
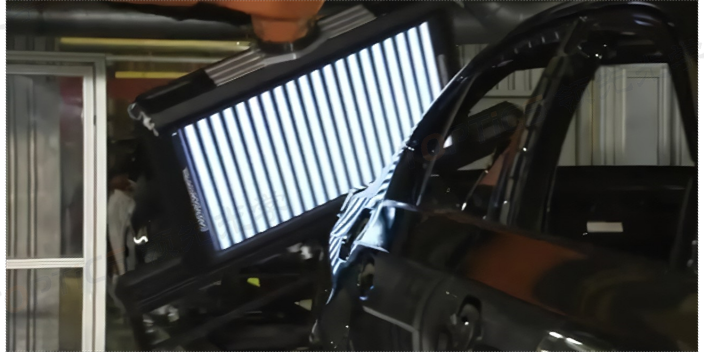
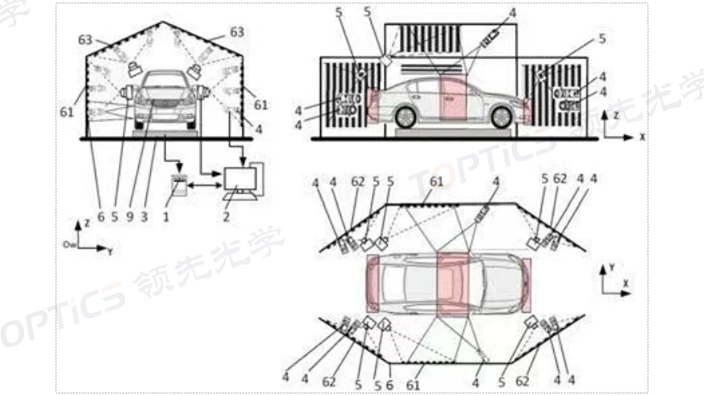
包括四套检测机械手臂、四套漆面视觉检测模组;检测时,被检测汽车移动至检测区域后,四套检测机械手臂分别带动固定在检测机械手臂前端的四套漆面视觉检测模组依据汽车表面轮廓定位检测划分规划得到的采样点,进行汽车表面的全范围成像,成像后通过汽车漆面图像处理提取汽车漆面表面外观缺陷。所述的漆面视觉检测模组包括:n套成像镜头相机组、防护外壳、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板;n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板均刚性固定在防护外壳上;且n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板自上而下安装,多套成像镜头相机组、三个测距传感器自左而右均匀分布,大尺寸条纹投影屏设置在多套成像镜头相机组和三个测距传感器之间,均匀漫射发光板设置在三个测距传感器下端。所述的n取值为3时为比较好,三套成像镜头相机组、三个测距传感器自左而右均匀分布,且每套成像镜头相机组与每个测距传感器上下位置对称。所述的汽车表面轮廓定位检测划分规划:通过读取汽车3d模型,将模型分割为多个离散点,再依据n套成像镜头相机组的物方成像视场大小进行离散点的剔除、筛选。平顶山非隧道式汽车面漆检测设备推荐设备基于3D视觉成像原理,结合先进的图像处理与机器学习技术,快速有效的识别瑕疵,实现漆面实时检测。

车辆通过隧道的同时完成检测。此种方案通常能达到80%~90%检出率,但需要大片单独检测区域,需要部署大量视觉传感器及光源,成本较高;且针对缩孔等微小缺陷检测效果不佳,同样很难满足需求。与之相近的,为了在节约硬件成本的同时保证检测效果,部分高校研发了可移动式视觉采集系统,通过将视觉系统集成在导轨上,结合四周的大尺寸面光源实现车辆的完整扫描,但仍需要单独的工作区间,针对微小缺陷的检测效果依旧难以保证。3、相位偏折法(PMD)相位偏折法是一种镜面/类镜面的表面质量检测技术,系统通常由程控条纹光(LCD屏幕)及工业面阵相机组成,光源投射特定图案到待测面上,利用反射图像相位对待测面微小变化敏感特点,根据相位解包裹及重建算法实现三维形貌及缺陷检测(人们不易观察水面形状,但可根据观察物体在水面倒影的变形感知水面波动)。在车辆漆面检测场景中,可将视觉系统(条纹光+相机)集成在机械臂末端,手眼标定获取视觉坐标系及机器人坐标系间位姿关系,根据预设轨迹在不同位置测量得到的表面数据进行拼接,实现整车扫描测量。三、应用案例1、美国福特2013年福特汽车在3个工厂涂装线上使用了自研的3D缺陷检测系统,安装了16个JAI高分面阵相机。
传统图像算法中特征提取主要依赖人工设计的提取器,需要有专业知识及复杂的参数调整过程,分类决策也需要人工构建规则引擎,每个方法和规则都是针对具体应用的.泛化能力及鲁棒性较差。具体到缺陷检测的应用场景,需要先对缺陷在包括但不限于颜色、灰度、形状、长度等的一个或多个维度上进行量化规定,再根据这些量化规定在图像上寻我符合条件的特征区域,并进行标记。传统图像处理有很多算法库,如Halcon、VisionPro和OpenCV等,一般采用编程语言调用算法库的形式来实现。常用的经典检测算法有Roberts算子,Sobel算子,Previtt算子,IOG算子和Canny算子等.Canny算子是1种边缘检测算法,设定了信噪比准则定位精度准则单一边缘响应准则来提高边缘检测精度。为满足这了条准则.CANNYJ在一阶微分算子的基础上,增加了2项改进.即非极大值抑制和双阈值。非极大值抑制能控制多边缘响应和边缘定位精度;双阈值能减少边缘的漏检率。 安全可靠地检测漆面形貌和非形貌缺陷,确保产品工艺质量。

汽车喷涂面漆有很多种方法,喷涂过程中也要相对的细心。那么汽车喷涂面漆有哪几种方法呢?小编分享一下我的经验。面漆的喷涂操作与底漆和二道浆的操作基本相同,只是喷涂的手法要求更加细腻一些,以获得良好的色彩光泽效果。(1)干喷指喷涂时选择的溶剂要快干,气压较大,漆量较小,温度较高等,喷涂后漆面较干。(2)湿喷指喷涂时选择的溶剂要慢干,气压较小,漆量较大,温度较低等,喷涂后漆面较湿。(3)湿碰湿同上面讲的湿喷有相似的一面,都是不等上道漆中溶剂挥发继续喷涂下一道漆。(4)虚***喷涂指在喷涂色漆后,将大量溶剂或固体分调整得极低的涂料喷涂在面漆上。(5)雾化喷涂俗称飞雾法喷涂,又叫飞漆,一般用于金属漆的施工。(6)带状涂装当喷涂某个基材表面的边缘时采用此法。此时应将喷***扇幅调得相对窄一些,一般调整到大约10cm宽。。机器视觉是图像分析技术,通过使用光学系统、工业数字相机和图像处理工具,来模拟人的视觉能力。平顶山非隧道式汽车面漆检测设备推荐
我们的检测系统改变了现在人工检测耗时过长、一次检出率低等缺陷,同时可以降低人工成本。莆田汽车面漆检测设备生产厂家
相位偏折术是一个比较冷门的方向,主要用于测量镜面物体。一直以来,干涉法都是测量镜面比较好方法,精度可以达到波长的几百分之一,但是有一些局限性:测量自由面型的镜面物体时,干涉法所需要的光学补偿原件制作复杂且昂贵;回程误差,干涉法很难快速标定;测量环境苛刻,不适合干涉法测量,因为轻微抖动、温度变化,会给测量记过带来很大误差;相位偏折法是一种应用于镜面/类镜面的表面质量检测技术,系统通常由程控条纹光(LCD屏幕)及工业面阵相机组成,光源投射特定图案到待测面上,利用反射图像相位对待测面微小变化敏感特点,根据相位解包裹及重建算法实现三维形貌及缺陷检测(人们不易观察水面形状,但可根据观察物体在水面倒影的变形感知水面波动)。莆田汽车面漆检测设备生产厂家
领先光学技术(江苏)有限公司成立于2019年,公司总部地址位于武进区天安数码城内独栋12-2#写字楼。我们的种子企业“ling先光学技术(常熟)有限公司”成立于2014年,是国家高新技术企业、科技型中小型企业、江苏省民营科技企业、雏鹰企业。知识产权80余项(发明专利8项)。内核团队:教授2名、博士2名、行业渠道关键人4人。长期稳定与复旦大学、大连理工大学合作。底层技术包括:光学(相位偏折、白光干涉、白光共焦、深度学习);MicroLED(发光器件、透明显示、微型投影)。是做一件“利用光学进行工业质量检测设备的生产和制造”。自主开发光学系统和底层内核算法,拥有十年以上行业经验,主要应用于:汽车玻璃检测行业、片材检测行业、半导体材料检测行业,我们的战略新产品:微米级光刻机已经完成版流片,也正在一步步趋于稳定和成熟。公司在科技的浪潮中,已经具有将内核技术转化为产品的经验与能力。公司是高科技、高成长性企业,公司不断的夯实自身技术基础,愿成为中国工业发展中奠基石的一份子,打破国外的智能装备的,树名族自有高技术品牌。

且n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板自上而下安装,多套成像镜头相机组、三个测距传感器自左而右均匀分布,大尺寸条纹投影屏设置在多套成像镜头相机组和三个测距传感器之间,均匀漫射发光板设置在三个测距传感器下端。所述的n取值为3时为比较好,三套成像镜头相机组、三个测距传感器自左而右均匀分布,且每套成像镜头相机组与每个测距传感器上下位置对称。所述的汽车表面轮廓定位检测划分规划:通过读取汽车3d模型,将模型分割为多个离散点,再依据n套成像镜头相机组的物方成像视场大小进行离散点的剔除、筛选。耐久性测试旨在评估汽车面漆在各种环境条件下的长期保护性能。江苏代替人工汽车面漆检测设...
- 襄阳工业质检汽车面漆检测设备生产厂家 2024-12-28
- 河北工业质检汽车面漆检测设备供应商 2024-12-28
- 天津代替人工汽车面漆检测设备供应商家 2024-12-27
- 开封代替人工汽车面漆检测设备哪家好 2024-12-27
- 九江高精度汽车面漆检测设备价格 2024-12-27
- 太原代替人工汽车面漆检测设备推荐厂家 2024-12-27
- 漳州全自动汽车面漆检测设备供应商家 2024-12-27
- 南平工业质检汽车面漆检测设备价格 2024-12-27
- 淮南代替人工汽车面漆检测设备价格 2024-12-27
- 大连快速汽车面漆检测设备品牌 2024-12-27

- 本溪全自动汽车面漆检测设备品牌 2024-12-26
- 长春高精度汽车面漆检测设备价格 2024-12-26
- 安徽汽车面漆检测设备供应商家 2024-12-26
- 包头光学方法汽车面漆检测设备 2024-12-26
- 龙岩代替人工汽车面漆检测设备源头厂家 2024-12-26
- 宁德代替人工汽车面漆检测设备供应商 2024-12-26



- 开封代替人工汽车面漆检测设备哪家好 12-27
- 江苏全自动配镜机器人公司 12-27
- 盐城配镜机器人生产厂家 12-27
- 九江高精度汽车面漆检测设备价格 12-27
- 无锡全自动配镜机器人哪家好 12-27
- 太原代替人工汽车面漆检测设备推荐厂家 12-27
- 漳州全自动汽车面漆检测设备供应商家 12-27
- 苏州远程配镜机器人供应商 12-27
- 北京智能配镜机器人推荐厂家 12-27
- 南平工业质检汽车面漆检测设备价格 12-27