
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
汽车测试装置一般是由若干相互联系或相互作用的传感器和一般设备等元件,就是为实现一定测试目的而组成的有机整体。测试系统有的体积庞大,有的体积简易,复杂的测试系统,一般是由一些基本的测试小系统组合而成的。
目前随着现代科技的迅速发展,非电物理量的测试和控制技术,已经应用于汽车检测中。一般的非电量的电测系统是常用的检测系统。一个完整的检测系统,一般应包括:传感器、信号调节器、显示和记录器以及数据处理器。另外还有一些定度和校准等系统附加的设备。
在汽车检测实验中,经常会碰到如何选择检测仪器及组成检测系统的问题。对检测系统的要求,当然要从检测对象、检测目的和要求出发,使其达到技术上的合理,经济上的节约。应当综合考虑精度要求。使用环境及被测物理量变化的快慢、检测范围、成本费用及自动化程度因素。但基本的要求应该是具有单值的、确定输入和输出关系。使检测结果在精度要求范围内不失真地反映被测物理量,检测系统的输出才能作为其输入的量度,从而完成预定的检测任务
汽车面漆检测设备具有强大的数据处理能力,方便用户进行数据分析与比较。宜昌非隧道式汽车面漆检测设备价格
汽车面漆检测设备
从而带动所述第二锥齿轮38转动,从而带动所述diyi锥齿轮43转动,此时所述螺纹套41转动带动所述螺纹杆40移动,从而带动左右两个所述滑动块46移动,所述滑动块46移动带动所述喷头16移动,由于此时所述机身10处于远离需要补油漆的汽车表面一侧,所述三通阀56将左侧的所述diyi连通管55与所述第二连通管57连通,此时启动所述气泵17时,所述喷头16能够喷射出油漆从而对汽车表面进行油漆覆盖,此时由于所述密封罩15与汽车表面贴合,油漆不会扩散出所述密封罩15外部,从而保护汽车表面不受多余油漆污染,当所述滑动块46移动至*右侧时启动所述第二电机48带动所述第三转轴51反转,多次重复上述操作后,汽车表面油膜厚度达到标准值;2、待油漆干后,向下按压所述机身10,此时所述花键杆23自上而下依次卡入所述锁定槽21内,从而调整机身10与所述汽车表面距离,当所述抛光轮44与油漆表面贴合并被压缩后,启动所述此时启动所述第二电机48带动所述第三转轴51转动,所述第三转轴51转动带动所述第二齿轮49与所述第三齿轮53转动,由于所述第三齿轮53与所述内齿圈52啮合,此时所述第三齿轮53转动带动所述转动架13转动,同时所述第二齿轮49转动带动所述第二转轴36转动。洛阳光学方法汽车面漆检测设备价格借助面漆检测设备,轻松实现汽车涂装质量的监控与管理。

本文介绍了机器视觉在工业领域的发展历程,通过其与人类视觉对比,凸显出机器视觉的优势。此外,通过对机器视觉的产业链情况进行分析,对行业进行梳理,有助于关注该领域的业内人士对机器视觉的未来趋势作出预判。机器视觉在工业检测中的应用历史与发展机器视觉在工业上应用领域广阔,**功能包括:测量、检测、识别、定位等。产业链可以分为上游部件级市场、中游系统集成/整机装备市场和下游应用市场。机器视觉上游有光源、镜头、工业相机、图像采集卡、图像处理软件等软硬件提供商,中游有集成和整机设备提供商,行业下游应用较广,主要下游市场包括电子制造行业、汽车、印刷包装、农业、医药、纺织和交通等领域。机器视觉全球市场主要分布在北美、欧洲、日本、中国等地区,根据统计数据,2014年,全球机器视觉系统及部件市场规模是,2015年全球机器视觉系统及部件市场规模是42亿美元,2016年全球机器视觉系统及部件市场规模是62亿美元,2002-2016年市场年均复合增长率为12%左右。而机器视觉系统集成,根据北美市场数据估算,大约是视觉系统及部件市场的6倍。中国机器视觉起步于80年代的技术引进,随着98年半导体工厂的整线引进,也带入机器视觉系统。
据Gartner发布的报告显示,由于芯片短缺以及汽车电气化、自动驾驶等趋势,全球前*大汽车制造商中的半数将自行设计芯片,借以掌控产品路线图和供应链。
Gartner研究副总裁Gaurav Gupta认为,汽车半导体供应链很复杂。在大多数情况下,芯片制造商只是汽车制造商的三级或四级供应商,通常需要一段时间才能适应汽车市场的需求变化,这使得汽车制造商增加了对半导体供应链的控制欲望。
特斯拉是**自研自动驾驶芯片的车企,对于特斯拉的做法,业内人士指出:“他们选择自研芯片,是因为当时英伟达这些厂商没有能满足他们需求的芯片,加上特斯拉销量起来后,有足够资金自己研发并找供应链支持。从结果来看,他们这种做法被市场认可,所以大家开始往这个方向尝试。”
在自研芯片方面,不同车企的重点和布局也有所不同。特斯拉、小鹏、蔚来等这些一直在用自研算法的车企,自研高算力芯片。前述人士指出:“车企喜欢强调全栈自研,但通用芯片无法发挥出自研算法的优势,所以有实力的厂商选择定制化自己的芯片来匹配自研算法。”从这个角度来说,车企自研高算力芯片前提之一是本身在自动驾驶软件及算法有足够强的能力。
这款汽车面漆检测设备具备高度灵敏性,轻松捕捉涂层细微变化。
检测算法识别漆面缺陷的过程分以下4步:图像采集、预处理、特征提取和分类决策.图像采集是指通过检测系统获取到的车身不同部位漆面的图像信息。预处理主要是指图像处理中的灰度化处理图像滤波、裁剪分割、形态学处理等操作.去除非必要检测区域,加强图像的重要特征,使缺陷特征更容易被提取出来。特征提取是指采用某种度量法则,进行缺陷特征的抽取和选择,简单的理解就是将图像上的漆面缺陷与正常漆面,利用某种方法将它们区分。分类决策是指构建某种识别规则,通过此识别规则可以将对应的特征进行归类和判定,主要应用手漆面缺陷的分类.以指导后续的打磨抛光操作。目前,常用的漆面缺陷检测算法主要分为2类:传统图像算法和深度学习算法。这2种算法的主要区别在于特征提取和分类决策的差异。专业的汽车面漆检测设备,为汽车涂装行业保驾护航。丹东工业质检汽车面漆检测设备推荐
这不仅需要进行大量的数据处理,而且更加数据类型也十分复杂,对算力的要求也就更高。宜昌非隧道式汽车面漆检测设备价格
目前国内多数车企均采用此种方案。通常人眼在正常视距(25cm)能分辨的较小尺寸约0.1mm左右。针对漆面缺陷检测,据统计约能达到70%~80%的检出率,但在灯带下长时间工作容易产生疲劳且对视力造成损害,并且无法精确提供缺陷种类及统计数据,很难满足需求。
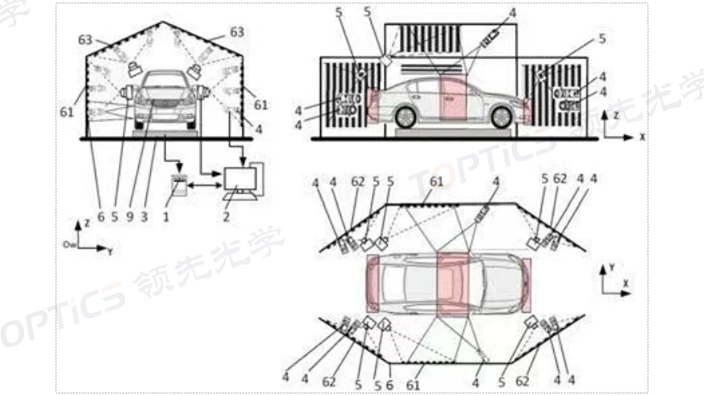
隧道式漆面检测方案采用传统2D面阵视觉系统,将多台LED条光及相机按一定间隔部署在隧道式结构中,车辆通过隧道的同时完成检测。此种方案通常能达到80%~90%检出率,但需要大片单独检测区域,需要部署大量视觉传感器及光源,成本较高;且针对缩孔等微小缺陷检测效果不佳,同样很难满足需求。
与之相近的,为了在节约硬件成本的同时保证检测效果,部分高校研发了可移动式视觉采集系统,通过将视觉系统集成在导轨上,结合四周的大尺寸面光源实现车辆的完整扫描,但仍需要单独的工作区间,针对微小缺陷的检测效果依旧难以保证。
相位偏折法是一种镜面/类镜面的表面质量检测技术,系统通常由程控条纹光(LCD屏幕)及工业面阵相机组成,光源投射特定图案到待测面上,利用反射图像相位对待测面微小变化敏感特点,根据相位解包裹及重建算法实现三维形貌及缺陷检测(人们不易观察水面形状,但可根据观察物体在水面倒影的变形感知水面波动)。
宜昌非隧道式汽车面漆检测设备价格

当所述滑动块46移动至*右侧时启动所述第二电机48带动所述第三转轴51反转,多次重复上述操作后,汽车表面油膜厚度达到标准值;2、待油漆干后,向下按压所述机身10,此时所述花键杆23自上而下依次卡入所述锁定槽21内,从而调整机身10与所述汽车表面距离,当所述抛光轮44与油漆表面贴合并被压缩后,启动所述此时启动所述第二电机48带动所述第三转轴51转动,所述第三转轴51转动带动所述第二齿轮49与所述第三齿轮53转动,由于所述第三齿轮53与所述内齿圈52啮合,此时所述第三齿轮53转动带动所述转动架13转动,同时所述第二齿轮49转动带动所述第二转轴36转动。指导新材料的研发和现有产品的改良工作,z终确保...
- 汽车面漆检测设备品牌 2025-11-20
- 大连快速汽车面漆检测设备供应商家 2025-11-20
- 鞍山光学方法汽车面漆检测设备推荐厂家 2025-11-20
- 泉州汽车面漆检测设备质量好价格忧的厂家 2025-11-20
- 黄石工业质检汽车面漆检测设备哪家好 2025-11-20
- 长春工业质检汽车面漆检测设备生产厂家 2025-11-20
- 平顶山快速汽车面漆检测设备哪家好 2025-11-20
- 长春快速汽车面漆检测设备生产厂家 2025-11-20
- 上海光学方法汽车面漆检测设备 2025-11-19
- 趋势性汽车面漆检测设备源头厂家 2025-11-19


- 郑州工业质检汽车面漆检测设备品牌 2025-11-19
- 福州汽车面漆检测设备价格 2025-11-18
- 洛阳全自动汽车面漆检测设备生产厂家 2025-11-18
- 浙江非隧道式汽车面漆检测设备源头厂家 2025-11-18
- 赣州光学方法汽车面漆检测设备推荐厂家 2025-11-18
- 包头高精度汽车面漆检测设备哪家好 2025-11-17






- 苏州高铁玻璃面型检测推荐厂家 04-14
- 常州特殊玻璃面型检测费用 04-14
- 广州曲度玻璃面型检测 04-14
- 宁波翘曲度玻璃面型检测供应商 04-14
- 杭州玻璃面型检测品牌 04-14
- 深圳在线玻璃面型检测哪家好 04-14
- 佛山玻璃面型检测供应商 04-14
- 平坦度玻璃面型检测公司 04-14
- 南通平坦度玻璃面型检测质量好价格忧的厂家 04-14
- 佛山汽车玻璃面型检测供应商 04-14