- 品牌
- 赫曼/HIMEN
- 型号
- /
SPTA系列预应力后张法型智能张拉设备典型特点:精细张拉数据真实与油缸完全**的测力计单元与高精度传感器权限管理与“傻瓜式”操作,确保数据真实性安全性可控管理多重液压阀和智能程序确保张拉和数据的安全张拉数据可一次性导入设备数据库,调用数据张拉自动张拉同步张拉*需选择梁号孔号即可实现全自动一键张拉力同步和位移同步双控,在不同的阶段自动调用可扩展性可追溯性可根据需要在两个油缸同步张拉的基础上扩展张拉结果自动记录在数据库内,可查阅打印和下载.更多产品欢迎垂询赫曼液压。张拉位移定位精度为0.2mm。湖北液压智能张拉规格
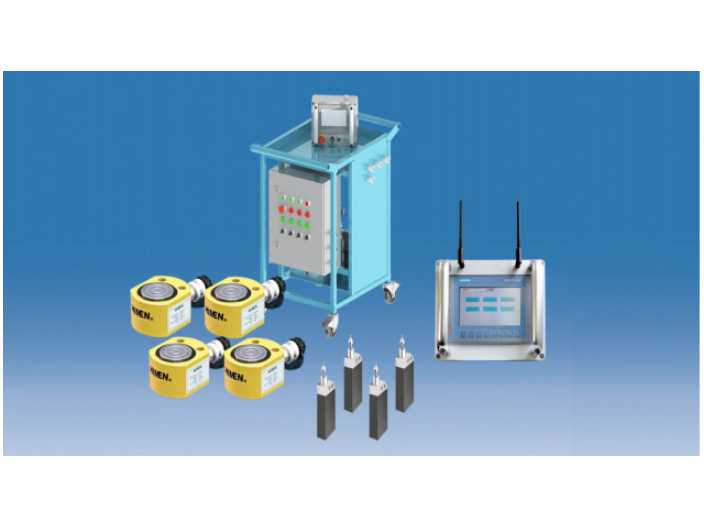
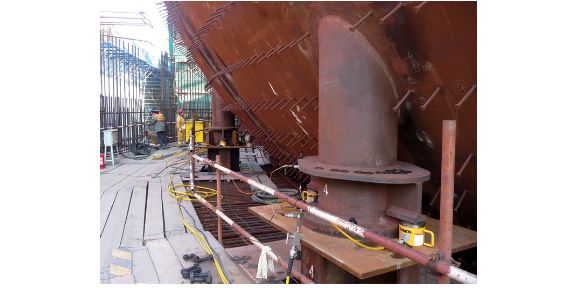
赫曼SPTA系列预应力后张法型智能张拉设备是一种专门用于预应力混凝土结构中的后张法施工的智能化设备。这种设备结合了先进的张拉技术和智能化控制系统,能够实现对预应力筋的精确、高效和安全的张拉操作。后张法是在构件混凝土达到设计规定的强度后,在预应力筋的张拉端用张拉机具通过锚具对预应力筋施加张拉预应力,靠锚具将预应力筋的预拉应力传给混凝土,使之产生预压应力的混凝土施工方法。SPTA系列设备就是专门为此种施工方法设计的。天津大吨位智能张拉工况如调整设备的运行状态、优化系统的性能等。

智能张拉设备具有以下几个特点:自动化控制:智能张拉设备采用电气控制系统和液压系统相结合的方式,实现对张拉过程的自动化控制,提高了工作效率和精度。精确控制:通过传感器实时监测张拉钢束的状态和变化,PLC根据反馈信号精确控制液压阀的开关,从而实现对液压系统的精确控制和调节。安全可靠:智能张拉设备具有多重安全保护措施,如过载保护、位移保护、压力保护等,确保张拉过程的安全可靠。数据记录和分析:智能张拉设备可以记录和存储张拉过程中的各项参数,如张拉力、张拉长度、张拉速度等,方便后续的数据分析和工程评估。
因此,需要根据工程规模和预算等因素来选择适合的方法。施工环境和条件:施工环境和条件也是选择先张法或后张法的因素之一。例如,在预制构件厂内,先张法则更为适合,因为这种方法可以在稳定的台座上进行张拉,不受施工现场环境的影响。而在现场施工时,后张法则更为方便,因为可以在混凝土浇注完成后进行张拉。经济效益:选择先张法或后张法还需要考虑经济效益。虽然先张法需要更多的设备和材料,但其可以大规模生产预应力构件,降低单个构件的成本。而后张法则需要在施工现场进行锚固等作业,可能需要更多的劳动力。因此,需要根据工程规模和预算等因素来选择适合的方法。总的来说,选择使用先张法或后张法需要根据工程要求、设计、材料和设备、施工环境和条件以及经济效益等因素综合考虑。在实际应用中,也可以根据具体情况进行灵活调整和优化。这意味着在浇筑完混凝土构件后,再进行预应力筋的张拉。

赫曼液压ACS系列换热板智能夹紧设备的工作原理主要基于先进的机械、电子和控制技术,实现换热板的自动、精确和高效夹紧。机械结构设计:ACS系列设备采用精密的机械结构设计,确保夹紧力的均匀分布和稳定输出。设备配备**度的夹紧装置,能够根据换热板的尺寸和厚度进行自适应调整,实现精确夹持。传感器与检测机制:设备内置高精度传感器,用于实时监测夹紧力和换热板的位置状态。传感器数据通过控制系统进行处理和分析,确保夹紧过程的安全性和可靠性。同时,设备还具备位置检测机制,能够准确判断换热板是否已到达预定位置,为后续夹紧操作提供精确指导。操作流程化和数据可追溯性。全自动智能张拉原理
预应力先张法型智能张拉设备:一般采用的锚具有钢丝夹具、张拉夹具和锚固夹具等。湖北液压智能张拉规格
赫曼智能张拉设备还具有高度的可靠性和稳定性。经过严格的质量控制和测试,设备能够在各种恶劣环境下稳定工作,确保施工质量和安全。此外,智能张拉设备还具备可扩展性。随着技术的不断进步,设备可以通过升级和改造来适应新的施工需求,保持技术**。同时,智能张拉设备还提供了***的安全保障。设备配备了多种安全保护机制,能够有效防止意外事故的发生,保障施工人员的安全。再者,智能张拉设备的维护保养也相对简单。设备采用模块化设计,使得维修和更换部件变得更加方便快捷。***,智能张拉设备还具有良好的经济效益。虽然初期投入可能较高,但长期来看,其高效、精细的工作方式能够**节省施工成本,提高项目的整体效益。湖北液压智能张拉规格
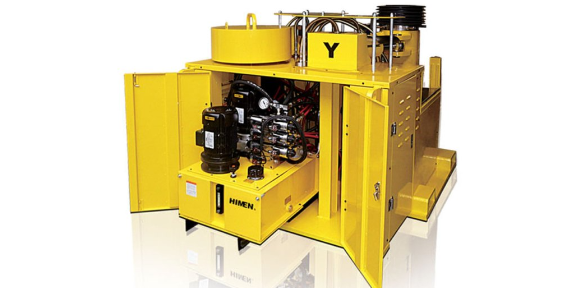
先张法智能张拉的原理是利用预应力钢筋的弹性收缩力来产生预应力。在张拉过程中,预应力钢筋被拉伸,产生反作用力,使得结构受到预应力。这种预应力能够抵消外部荷载产生的拉力,从而减少结构开裂或变形的风险。智能张拉设备主要依靠电动机驱动,通过电力传动系统带动液压驱动系统进行工作。其工作原理可分为以下几个步骤:检测:智能张拉机通过激光传感器或高精度编码器等设备对工作过程中的张力控制进行实时检测。这些传感器可以测量被拉伸物体的位移、速度和张力等参数。控制:基于检测到的参数,智能张拉机的控制系统会进行实时计算和调整,以确保设定的张拉力与实际张拉力相匹配。施加张拉力:通过液压系统,智能张拉机可以精确地施加所需的...
- 江苏耐斯特智能张拉型号 2024-07-02
- 江苏全自动智能张拉报价 2024-07-02
- 大连高精度智能张拉工况 2024-07-01
- 电脑数控智能张拉型号 2024-07-01
- 上海高精度智能张拉厂家 2024-07-01
- 河北赫曼智能张拉参数 2024-07-01
- 浙江数控智能张拉参数 2024-07-01
- 耐斯特智能张拉厂家 2024-07-01
- 江苏先张法智能张拉系统 2024-07-01
- 山东智能张拉工况 2024-07-01



- 液压智能张拉供应 2024-07-01
- 浙江大吨位智能张拉型号 2024-07-01
- 江苏大吨位智能张拉原理 2024-07-01
- 湖北后张法智能张拉系统 2024-06-30
- 上海赫曼智能张拉 2024-06-30
- 大连高精度智能张拉 2024-06-30



- 大连超高压围压腔报价 07-02
- 天津什么是针筒注射泵特点 07-02
- 天津耐斯特智能张拉型号 07-02
- 山东什么是针筒注射泵伺服控制 07-02
- 江苏耐斯特智能张拉型号 07-02
- 湖南什么是针筒注射泵多路智能 07-02
- 上海什么是超高压围压腔特点 07-02
- 上海上海耐斯特液压超高压围压腔参数 07-02
- 湖北上海耐斯特液压超高压围压腔报价 07-02
- 浙江超高压围压腔 07-02