- 品牌
- 赫曼/HIMEN
- 型号
- /
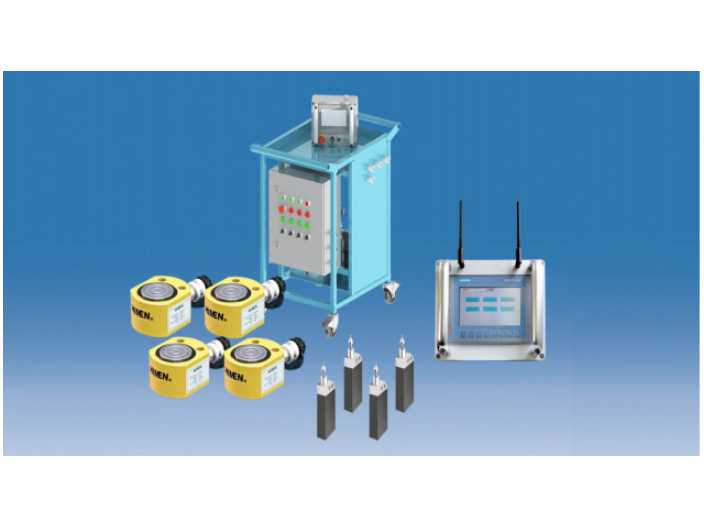
控制系统是智能张拉设备的重要组成部分,它由电气控制柜、传感器、PLC等组成。电气控制柜用于控制和监测整个张拉过程中的各个参数,如张拉力、张拉长度、张拉速度等。传感器用于实时监测张拉钢束的状态和变化,将数据传输给PLC进行处理和分析。PLC根据传感器的反馈信号,通过控制液压阀的开关,实现对液压系统的精确控制和调节。张拉钢束是智能张拉设备的工作对象,它由多股钢丝组成,通过张拉设备施加的力来实现预定的张拉力和张拉长度。在张拉过程中,先将张拉钢束的一端固定在锚具上,然后通过液压系统施加力,使张拉钢束逐渐拉紧,直至达到预定的张拉力和张拉长度。在达到预定张拉力和张拉长度后,将张拉钢束的另一端固定在锚具上,完成整个张拉过程。智能控制子站通过引入智能算法和自适应机制。大连高精度智能张拉

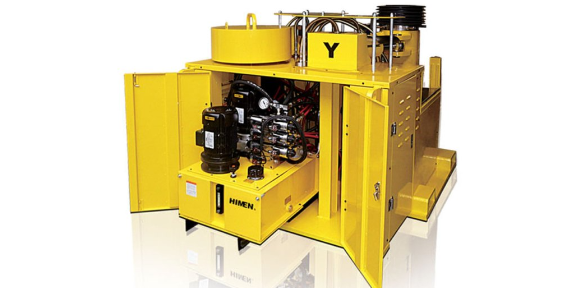
此外,液压智能张拉系统采用双孔同时压浆,以提高压浆效率。压浆系统由主机、测控系统、循环压浆系统组成。浆液由预应力孔道、制浆机、压浆泵组成的回路内循环以排净管道内的空气,及时发现管道堵塞等情况,并通过加大压力冲孔排除杂质,消除压浆不密实因素。总之,液压智能张拉系统的工作原理主要基于传感器采集数据、传输数据、分析数据和发出指令等步骤,实现预应力筋的自动化张拉和压浆。这种技术提高了施工效率和质量,保证了桥梁结构的安全性和稳定性。液压智能张拉原理该设备还具有力同步精度0.5%和位移同步精度1mm的特点。

赫曼SPTA系列预应力后张法型智能张拉设备,精确张拉:设备采用高精度传感器和智能化控制系统,能够实时监测和调整张拉力的大小,确保预应力筋的张拉精度达到设计要求。通过精确的张拉控制,可以**提高预应力混凝土结构的质量和稳定性。高效施工:智能张拉设备具备自动化和智能化的特点,能够减少人工操作,提高施工效率。同时,设备还具有快速响应和稳定工作的能力,能够适应不同规模和复杂度的工程项目。设备还具备故障自诊断和预警功能,能够及时发现并处理潜在的安全隐患。
赫曼SPTB系列预应力先张法型智能张拉设备设备采用智能化控制系统,实现了权限分级受控管理,消除了人为因素导致的张拉质量隐患。操作人员可以根据实际需要选择不同的张拉模式,如单端自动张拉或两端同步自动张拉,从而提高了施工效率。适应性强:设备采用模块化设计和通讯总线方式,使得整体张拉设备连接管线**少化,利于现场使用和管理。此外,通过选择不同的张拉油缸,还可以实现不同等级的力张拉精度,以适应不同工程项目的需求。采用的张拉机具有拉杆式千斤顶和锥锚式千斤顶等。

赫曼液压ACS系列换热板智能夹紧设备的工作原理主要基于先进的机械、电子和控制技术,实现换热板的自动、精确和高效夹紧。机械结构设计:ACS系列设备采用精密的机械结构设计,确保夹紧力的均匀分布和稳定输出。设备配备**度的夹紧装置,能够根据换热板的尺寸和厚度进行自适应调整,实现精确夹持。传感器与检测机制:设备内置高精度传感器,用于实时监测夹紧力和换热板的位置状态。传感器数据通过控制系统进行处理和分析,确保夹紧过程的安全性和可靠性。同时,设备还具备位置检测机制,能够准确判断换热板是否已到达预定位置,为后续夹紧操作提供精确指导。智能张拉系统通过梁场信息管理中心下发的张拉数据。湖南电脑数控智能张拉工况
根据数据处理的结果,控制器会生成相应的控制信号。大连高精度智能张拉
ACS系列换热板智能夹紧设备,是赫曼为可拆卸式板式换热器的换热板实现自动夹紧和拆卸而研制的智能设备,设备采用工业电脑和智能程序管理,便携式远程遥控器操作。设备具备自动行走能力,多种宽度与高度调整定位能力,精确对中能力,自动实现换热板的同步夹紧工作。ACS系列换热板智能夹紧设备采用变频电机控制4个大直径橡胶轮行走,实现前进、后退、旋转等动作,使得设备可进行长距离移位、换热板夹紧工作前的设备定位和自动油缸套件精确对中定位。更精密的行走控制需求可选择采用配置有伺服控制技术驱动的麦克纳姆轮行走,实现360度全方向的任意移位和精确定位。ACS系列换热板智能夹紧设备适用于多个系列的板式换热器,设备设计有4个伺服电机驱动的自动夹紧油缸套件,可以进行高度方向的上下调整,也可以进行水平方向的左右调整,4个自动夹紧油缸套件可以根据换热器的尺寸进行调整,以适应夹紧工作。大连高精度智能张拉
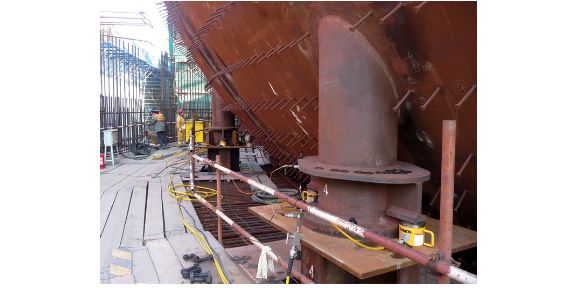
先张法智能张拉的原理是利用预应力钢筋的弹性收缩力来产生预应力。在张拉过程中,预应力钢筋被拉伸,产生反作用力,使得结构受到预应力。这种预应力能够抵消外部荷载产生的拉力,从而减少结构开裂或变形的风险。智能张拉设备主要依靠电动机驱动,通过电力传动系统带动液压驱动系统进行工作。其工作原理可分为以下几个步骤:检测:智能张拉机通过激光传感器或高精度编码器等设备对工作过程中的张力控制进行实时检测。这些传感器可以测量被拉伸物体的位移、速度和张力等参数。控制:基于检测到的参数,智能张拉机的控制系统会进行实时计算和调整,以确保设定的张拉力与实际张拉力相匹配。施加张拉力:通过液压系统,智能张拉机可以精确地施加所需的...
- 江苏耐斯特智能张拉型号 2024-07-02
- 江苏全自动智能张拉报价 2024-07-02
- 大连高精度智能张拉工况 2024-07-01
- 电脑数控智能张拉型号 2024-07-01
- 上海高精度智能张拉厂家 2024-07-01
- 河北赫曼智能张拉参数 2024-07-01
- 浙江数控智能张拉参数 2024-07-01
- 耐斯特智能张拉厂家 2024-07-01
- 江苏先张法智能张拉系统 2024-07-01
- 山东智能张拉工况 2024-07-01



- 液压智能张拉供应 2024-07-01
- 浙江大吨位智能张拉型号 2024-07-01
- 江苏大吨位智能张拉原理 2024-07-01
- 湖北后张法智能张拉系统 2024-06-30
- 上海赫曼智能张拉 2024-06-30
- 大连高精度智能张拉 2024-06-30



- 大连超高压围压腔报价 07-02
- 天津什么是针筒注射泵特点 07-02
- 天津耐斯特智能张拉型号 07-02
- 山东什么是针筒注射泵伺服控制 07-02
- 江苏耐斯特智能张拉型号 07-02
- 湖南什么是针筒注射泵多路智能 07-02
- 上海什么是超高压围压腔特点 07-02
- 上海上海耐斯特液压超高压围压腔参数 07-02
- 湖北上海耐斯特液压超高压围压腔报价 07-02
- 浙江超高压围压腔 07-02