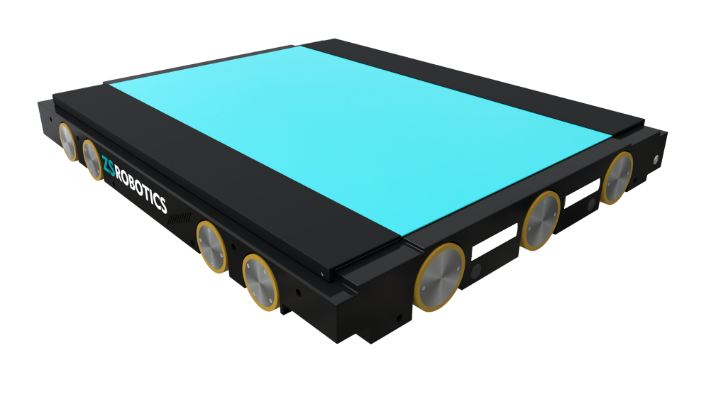
四向穿梭车是一种自动化搬运货物的设备,它与无线遥控相连接,结合RFID、条形码等识别技术,轻松实现货架货物的自动识别和存取。四向穿梭车存货的原理是将四向穿梭车放置在托盘下的运行的货架轨道上。在遥控指令或者wms系统的引导下,将穿梭车的升降平台面朝上,将托盘单元抬起运行到目的地,然后将托盘上的货物存放到货位上。四向穿梭车的存货原理是通过叉车或堆垛机将托盘单元货物放置在四向穿梭车货架的巷道导轨前方。然后仓库工人用无线电遥控操作四向穿梭车携带托盘单元在货架导轨上运行,运输到相对应的货位上。四向穿梭车可以通过叉车或堆垛机放置在不同的货架轨道上,一辆四向穿梭车可以用于多条货架巷道。四向穿梭车的数量由货架的巷道深度、总货运量和出入库频率等综合因素决定。四向穿梭车行输送能力强,可承载较大的载荷。浙江超薄型四向穿梭机器人结构
智世四向穿梭车定位系统的制作方法:1、在物流仓储行业内,智能化立体仓库被普遍地应用;穿梭车是智能化立体仓库中的主要设备,用来实现货物的无人化搬运,包括纸箱、周转箱等。2、穿梭车是一种在立体货架的轨道上行驶的自动化物流搬运小车。主要用于高密度货架式仓储系统,实现无人化搬运,在大量平行布置的储货流道间不需保留专门空间,但增加了连接所有流道口的行车通道,行车通道安装交错布局的方式分为横向的巷道和纵向的流道,流道和巷道中均铺有轨道,由于巷道连接所有流道,智世四向穿梭车可以将货架中的任意一个储位上的货物直接搬运到另一个储位上,不需要借助类似叉车这样的中间转运设备,这样就可以提高仓储系统的搬运效率,特别是在执行移库作业时,效率提高更加明显。安徽机械结构四向穿梭车解决方案智世智能四向穿梭车调试简单快速,方便实施。

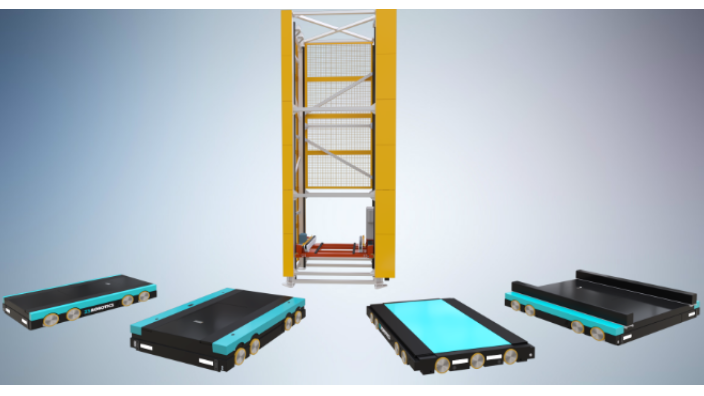
智世四向穿梭车的存货原理是通过叉车或堆垛机将托盘单元货物放置在智世四向穿梭车货架的巷道轨道前方,然后仓库工人用软件系统操作智世四向穿梭车携带托盘单元在货架导轨上运行,运输到相应的任意货位上。一辆智世四向穿梭车可以用于多条货架巷道。智世四向穿梭车的数量由货架的巷道深度、总货运量和出入库频率等综合因素决定。同时通过提升机等智能仓储设备,智世四向穿梭车可以实现换层等操作,提升仓库的空间利用率。智世四向穿梭车行驶速度快,存储密度高,输送能力强,可承载较大的载荷,同时结构美观,运行噪音低。不但可以提高物流效率和空间利用率,还可以节省人力和存储面积,并且易于扩展。正是由于这些优势,其受到越来越多行业的青睐,应用也越来越普遍。
四向穿梭车操作守则介绍:1、货物置遵循从上到下的轻便法则:四向穿梭车架子头重容易发生事故,一旦发生事故,后果不堪设想。所以,装货物的时候一定要把轻的货物放在架子上面,重的放在架子底部以稳定架子底部,避免事故发生。2、货物配置要避免超重的规则:装载时注意不要超重,否则架子容易变形和折断,对架子下的货物和人有危险性,所以也不能存在超重的问题,使用和装载货物的时候也要注意防止撞到架子上。特别是叉车使用运行的时候,使用人必须注意不要让叉车和架子直接相撞。四向穿梭车注意事项:检查四向穿梭车外部外观,看是否有明显被撞击、变形、开裂等异常。
四向穿梭车采用纯机械结构,产品使用生命周期长,同时采用机械顶升设计,无液压结构密封圈老化风险,无需频繁更换液压油,维保成本低,更加节能高效。四向穿梭车可以兼容两向穿梭板货架,降低了智能立库升级成本;同时其自动除尘系统可以适应更加复杂的环境。四向穿梭车解决了传统穿梭车不能横向移动的问题,这也是四向穿梭车比较好的特点。四向穿梭车具有四个方向的移动能力,这也决定了四向穿梭车具有更大的应用范围和更大的灵活性,同时系统的安全性、稳定性更高。比如某一小车出现问题后,四向穿梭车可以随意变更巷道,增减穿梭车的数量来调节而不会影响系统整体的进出库能力。四向穿梭车结构美观,运行噪音低。吉林立体库四向穿梭车
四向穿梭车使用过程中的例行检查,包含对四向穿梭车的检查以及使用的货架例行检查。浙江超薄型四向穿梭机器人结构
智世四向穿梭车的结构设计有哪些难度?一、需要借助于有限元来辅助分析,尤其整车的行驶稳定性分析目前只建立在工况模拟试验的基础上,还不能从理论上有体系地研究。1、整车的运动振动主要集中在驱动及液压部分,其轮轴及轴承上容易引起振动疲劳破坏,主要在于钢货架内配置的轨道存在接头及安装偏差,货架结构体也存在一定的弹性变形,车轮与轨道的接触刚度较大,易引起轮轨接触振动、车体振动,目前多采用包胶车轮等措施来优化轮组共振。二、电池高容量技术,电池技术是影响智世四向穿梭车应用的关键技术之一。因为智世四向穿梭车存储搬运的托盘单元货物荷载重,单位运行路程的功耗大,每次完全充电能满足的工作时间成为智世四向穿梭车普遍应用的一个瓶颈。有效地监测到智世四向穿梭车的锂电池健康状态及充放电性能,也是保证托盘四向穿梭式自动化密集仓储系统全自动化的关键技术之一,而高性能高容量的电池价格昂贵,使得智世四向穿梭车的制造成本居高不下。浙江超薄型四向穿梭机器人结构