中空旋转平台的工作原理中空旋转平台的工作原理相对直观。通过连接驱动装置(如伺服电机),平台可以实现旋转。伺服电机通过减速机构(如齿轮箱)传递动力,驱动平台转动到指定位置。同时,内置的传感器(如编码器)会反馈实际位置信息,以实现闭环控制,确保定位的精确性。中空旋转平台的应用领域中空旋转平台广泛应用于需要精确定位和中空特性的场合。在机器人技术中,它们用于关节或末端执行器的驱动,使得机器人手臂能够灵活地抓取和搬运物料。精细的零位校准功能,确保了中空旋转平台在重复定位中的高度一致性。山西高精度中空旋转平台批发
中空旋转平台定义中空旋转平台减速机是近几年才流行的自动化装置,市场上的叫法很多,例如:中空旋转台、中空旋转平台减速机、高精密中空螺旋平台减速机、步进旋转平台、伺服旋转台、行星旋转台、旋转器和转向器,指的都是一个产品不同的名称而已。中空旋转平台是一款性的新产品。用于多种旋转运动场合。可取代DDMOTOR与凸轮分割器。集高工作效率,高精度,高刚性,高性价比于一身。是旋转运动机构中性的产品。在两者之间取得平衡,重复定位精度≦10秒,马达轻松配制,承载稳重,可搭配AC伺服马达或步进马达做任意角度分割,既可满足分割器无法达到之数位控制,定位精度又可媲美DD马达,可外置传感器做位置信号反馈给PLC或工控机。河北中空旋转平台哪家好中空旋转平台可以通过电动或液压系统进行动作控制。

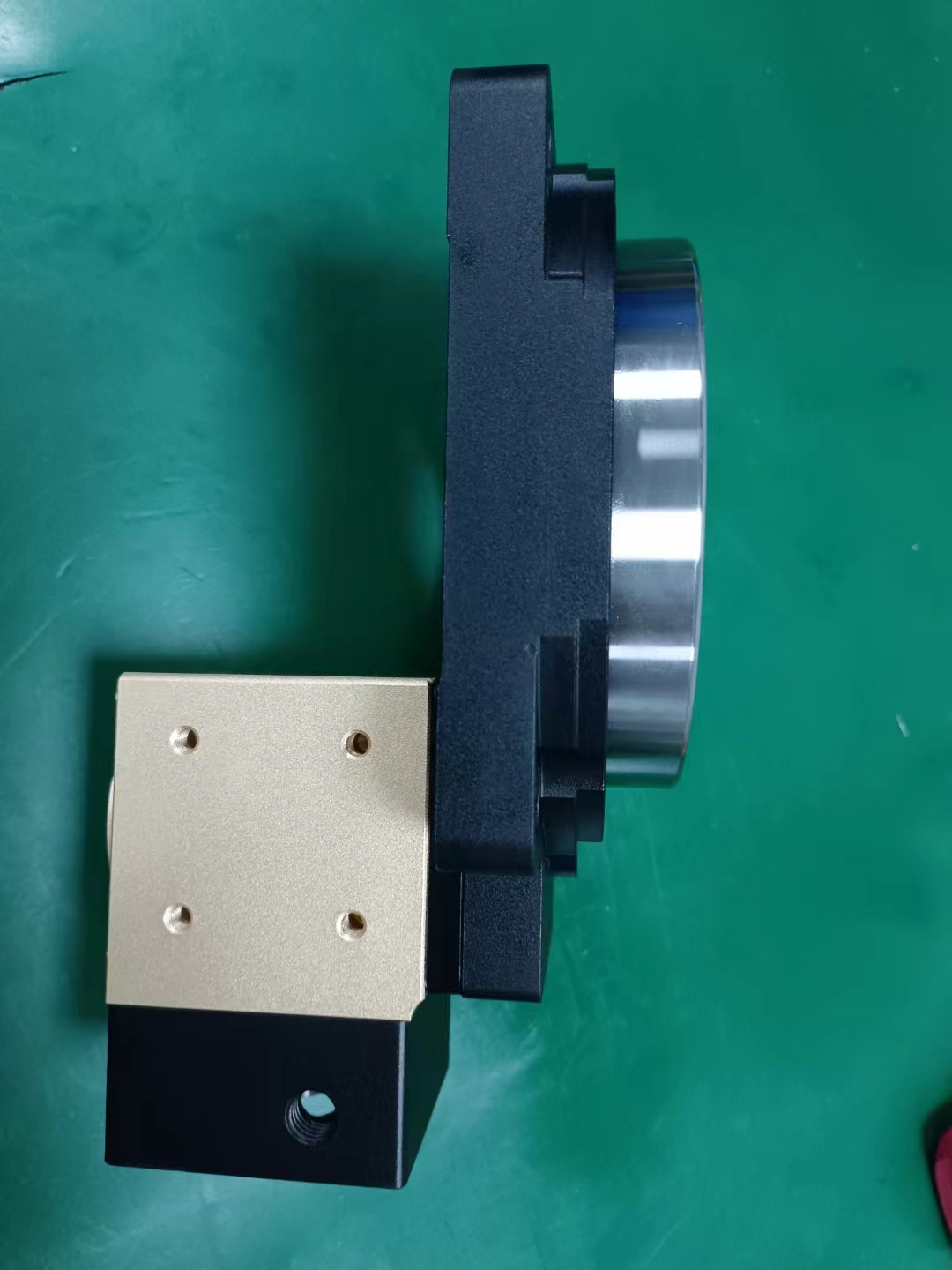
中空旋转平台是一种新型减速器产品。根据不同的减速比,可获得不同的输出速度,可用于各种旋转运动场合。可以替代DD电机和凸轮分配器。两者平衡,重复定位精度小于5秒,电机配置简单,负载稳定,中空旋转平台可配合交流伺服电机或步进电机进行任意角度分割,既满足了分割器无法实现的数字控制,又具有堪比DD电机的定位精度。中空旋转平台由电机驱动,实现角度调节的自动化。精整蜗轮或齿轮传动,不限角度调整。精密轴系设计使其具有精度高、载荷大的特点;中空旋转平台步进电机和传动部分采用进口质量弹性联轴器连接,消除了空间和加工形位误差。
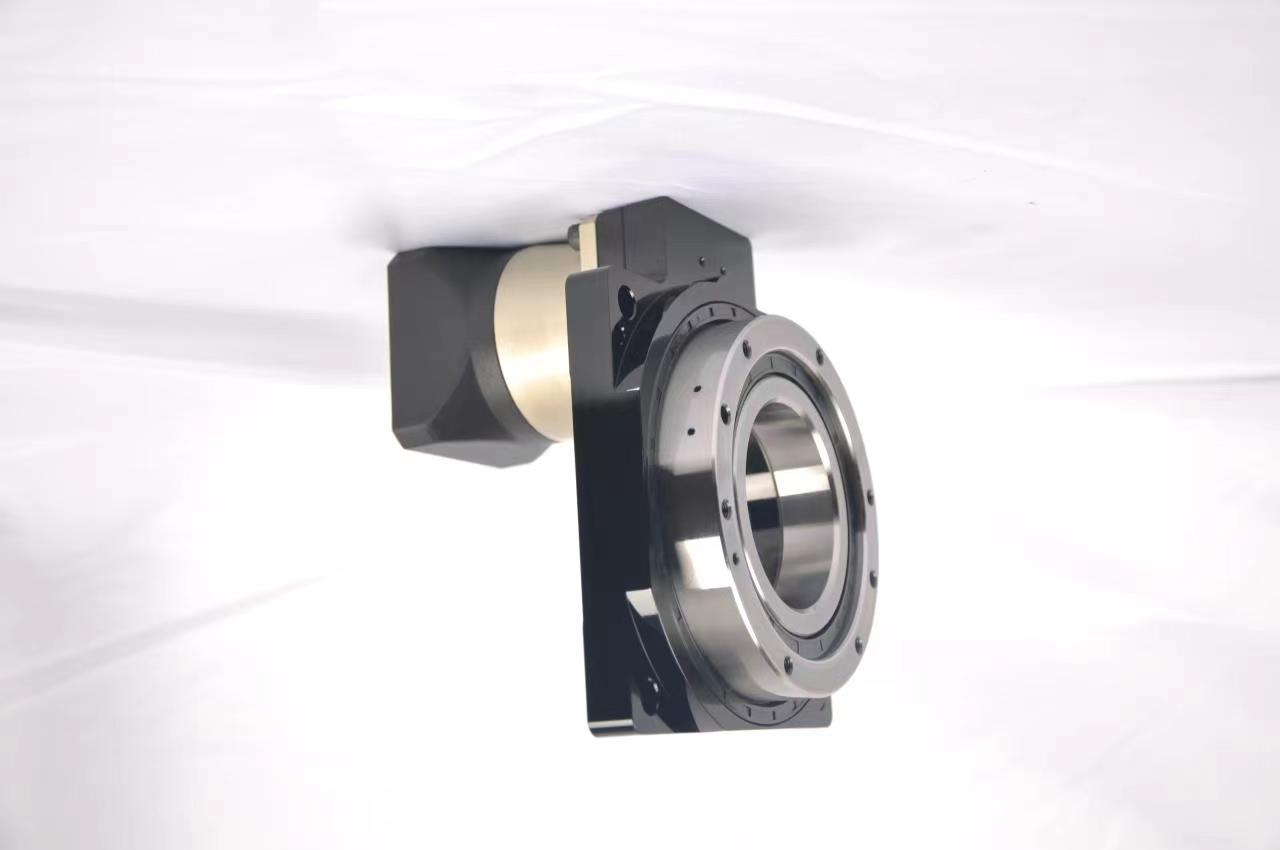
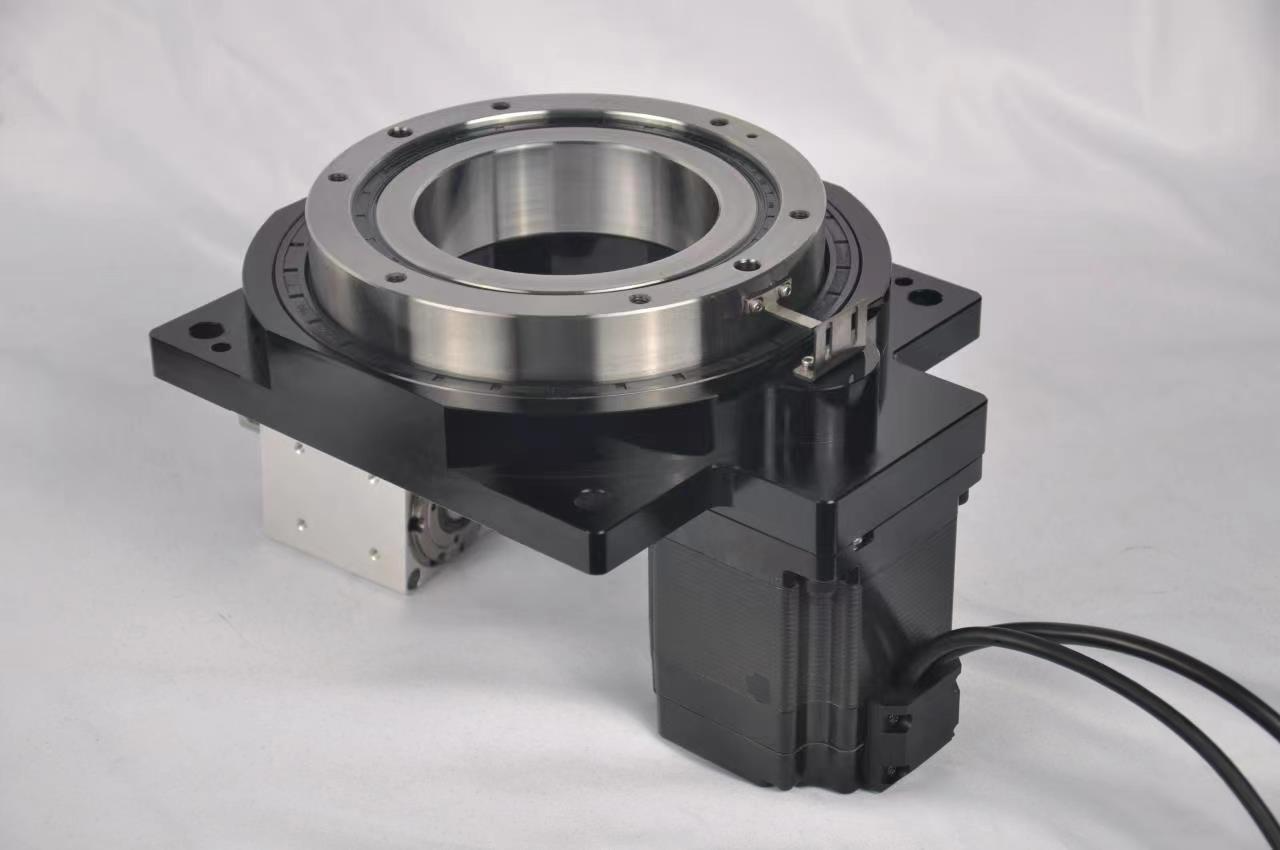
中空旋转平台是一项性的产品,用于各种旋转运动场合。它是旋转运动机构中的性产品,两者之间达到了平衡,重复定位精度≤5秒,易于配置电动机,并且负载稳定。可以与交流伺服电机或步进电机配合使用,进行任意角度分割,可以满足分频器无法实现的数字控制,定位精度好。中空旋转平台由电机驱动,实现自动角度调整。成品蜗轮或齿轮传动装置,无限角度调节。精密的轴系统设计可确保高精度和大负载能力;步进电机与传动部件采用进口质量弹性联轴器连接,消除了空间和加工误差。转台外圈上的刻度很直观,标准接口便于信号传输,手动手轮配置,可以使用电子控制的手动。中空旋转平台的优点:1.直接连接:简单的设计提高了可靠性。2.大口径中空旋转平台,接线和管道简洁。3.定位精度高,定位时间短:可以在短时间内实现惯性负载的定位。采用强高度材料制造的中空旋转平台,即使在恶劣工作环境下也能保持长久的使用寿命。

中空轴旋转平台通过电机驱动,实现角度调整自动化。精加工齿轮传动,角度调整无极限。精密轴系设计,保证精密高,承载大;步进电机与传动件通过进口弹性联轴器连接,排除空间和加工形位误差。旋转台面外圈刻度直观;标准接口,方便信号传输;手动手轮配置,电控手动均可。可选装伺服电机或步进电机。中空轴旋转平台可取代DD马达与分割器,在两者之间取得平衡,大幅度降低成本,性新产品,重复定位精度≦5秒,马达轻松配制,承载稳重,可搭配AC伺服马达或步进马达做任意角度分割,可满足分割器无法达到之数位控制,且定位精度。中空旋转平台的特征是什么?升降中空旋转平台设备
中空旋转平台能够提供高精度的旋转和定位功能。山西高精度中空旋转平台批发
中空旋转平台是一种新型减速器产品。根据不同的减速比,可获得不同的输出速度,可用于各种旋转运动场合。可以替代DD电机和凸轮分配器。两者平衡,重复定位精度小于5秒,电机配置简单,负载稳定,中空旋转平台可配合交流伺服电机或步进电机进行任意角度分割既满足了分割器无法实现的数字控制,又具有堪比DD电机的定位精度。中空旋转平台由电机驱动,实现角度调节的自动化。精整蜗轮或齿轮传动,不限角度调整。精密轴系设计使其具有精度高、载荷大的特点;中空旋转平台步进电机和传动部分采用进口质量弹性联轴器连接,消除了空间和加工形位误差。山西高精度中空旋转平台批发