- 品牌
- **光学
- 型号
- lx001
- 加工定制
- 是
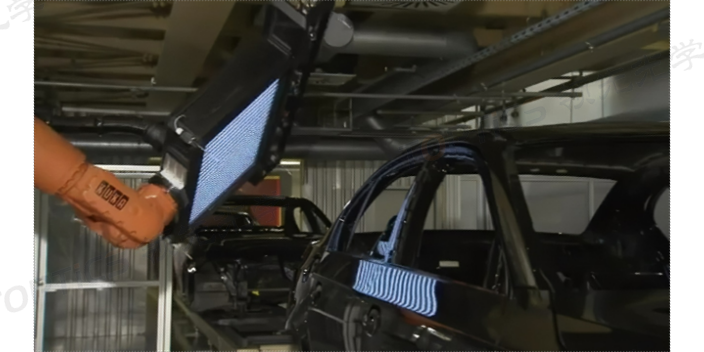
结构方法的核是将物体分解成了模式或模式基元,而不同的物体结构有不同的基元串(或称字符串),通过对未知物体利用给定的模式基元求出编码边界,得到字符串,再根据字符串判断它的属类。在特征生成上,很多新算法不断出现,包括基于小波、小波包、分形的特征,以及独二分量分析;还有关子支持向量机,变形模板匹配,线性以及非线性分类器的设计等都在不断延展。3、深度学习带来的突破传统的机器学习在特征提取上主要依靠人来分析和建立逻辑,而深度学习则通过多层感知机模拟大脑工作,构建深度神经网络(如卷积神经网络等)来学习简单特征、建立复杂特征、学习映射并输出,训练过程中所有层级都会被不断优化。偏折及干涉光学技术jing准检测工业品瑕疵及各种质量问题。芜湖在线检测设备联系方式

设备拍照主要用到的相机有:CCD工业相机、CMOS工业相机、激光检测相机、目前主要分为这三种,CCD工业相机主要应用于动态拍照,CMOS工业相机主要用于静态拍照,激光主要用于检测产品的尺寸,还有检测产品的平面度和深度。每个相机都有不同的功能。工业相机镜头,所有的相机都需要镜头,镜头主要的作用就是帮助工业相机放大或者缩小拍照视野。伺服电机,因为大多数设备都是动态拍照的,这样的检测方式速度会非常快,所以需要一台运转速度非常稳定的伺服电机来带动。芜湖在线检测设备生产厂家液晶面板行业检测设备,降低漏检,以提高产品质量。

其中,所述顶升升降器位于两个内基座之间的中间位置,所述顶升升降器的顶部固定连接所述定位板,多个所述定位卡柱设置在所述定位板上,所述检测上料输送机构与所述检测定位与前移机构的交界处还设置有辅助检测支架,所述辅助检测支架上设置有辅助视觉检测摄像头,所述辅助视觉检测摄像头能够检测所述主板是否输送至所述检测定位与前移机构上。与现有技术相比,本发明的有益效果是:本发明可以快速的实现对计算机主板的视觉检测,实现自动化流水作业,本发明在对主板进行流水检测时,待检测的主板置于主板输送机构上。
而图像处理算法的效率高低是计算机视觉成功应用的关键,尽管国内外都提出一些新的算法,但是大部分仍处于实验阶段。特别是有复杂背景的工业现场,对视觉识别技术的识别率和精度降低。机器视觉技术应用前景极为广阔,目前应用于生产生活各领域,但我国发展滞后,在工业检测中离实用化、商业化还有差距,因此亟待提高我国机器视觉技术的发展速度和水平,达到工业生产的智能化、现代化,为我国的现代化建设做出应有贡献。钢铁制造厂运用机器视觉优化效率及质量钢铁制造过程中,辨识及追溯其产品是一项困难的任务。半导体行业检测设备,Wafer翘曲、平坦度检测设备。

外观检测设备及方法技术领域:本发明涉及检测技术,尤其涉及一种外观检测设备及方法。背景技术:随着触屏技术的发展,在当今时代,玻璃材质的表面外观在手机和平板电子产品中得到广泛应用。在上述手机和平板电子产品生产完成后,需要对该电子产品的外观进行检测。目前,在对电子产品的外观进行检测时,可以采用人工检测或采用检测设备检测两种方式。当待检测的电子产品的表面采用玻璃材质时,由于玻璃材质具有易伤和易留痕的特点,因此人工检测时会制造出新的表面缺陷,例如指纹等,从而影响电子产品的美观程度,无法有效地对玻璃材质的表面进行外观检测。光学透镜检测设备,针对外观不良、尺寸不良(含3D)的检测。合肥反光面检测设备供应商家
he心技术人工智能之图像深度学习。芜湖在线检测设备联系方式
每个所述黑白相机和每个所述彩色相机分别连接一个所述镜头,并分别连接一个所述环形光源或一个所述同轴光源;所述至少一个环形光源和所述至少一个同轴光源用于在开启状态下发出光源;所述至少两个黑白相机和所述至少两个彩色相机用于在开启状态下进行拍照,并向所述数据处理单元发送拍照结果;数据处理单元,用于根据所述待检物的位置信息和所述拍照结果进行图像信息处理,确定所述待检物的缺陷位置。2.根据权利要求1所述的设备,其特征在于,所述黑白相机和所述彩色相机的总数是根据所述待检物的尺寸和所述黑白相机和所述彩色相机的视野范围和像素属性确定的。3.根据权利要求2所述的设备,其特征在于,所述黑白相机和所述彩色相机的总数根据下式确定4.根据权利要求1至3中任意一项所述的设备,其特征在于,所述环形光源具体用于在开启状态下发出至少一个预设角度的光。5.根据权利要求1至3中任意一项所述的设备,其特征在于,每个所述黑白相机和/或每个所述彩色相机上方设置一个所述环形光源或一个所述同轴光源;或者,至少一个所述黑白相机和/或所述彩色相机上方设置一个所述环形光源和一个所述同轴光源。芜湖在线检测设备联系方式

所述至少四个传感器具体用于在感知所述待检物经过时向自身对应的所述黑白相机或所述彩色相机发送触发命令;所述至少两个黑白相机和所述至少两个彩色相机具体用于在收到触发命令后进行一次拍照或进行预设次数的连续拍照。7.—种外观检测方法,其特征在于,应用于包括传送带、至少两个黑白相机、至少两个彩色相机、至少四个镜头、至少四个传感器、至少一个环形光源、至少一个同轴光源和数据处理单元的外观检测设备,所述方法包括采用所述传送带放置待检物并使所述待检物沿所述传送带的传送方向移动;当所述至少四个传感器感知所述待检物经过时,向所述数据处理单元发送所述待检物的位置信息,检测设备是Ling先光学自主研发软件算法、硬件设备...
- 油漆面检测设备供应商家 2024-10-22
- 芜湖在线检测设备联系方式 2024-10-22
- 芜湖视觉检测设备联系人 2024-10-22
- 湖州微纳检测设备报价 2024-10-22
- 湖州在线检测设备电话 2024-10-22
- 嘉兴翘曲度检测设备联系方式 2024-10-22
- 绍兴反射面检测设备联系方式 2024-10-21
- 湖州翘曲度检测设备品牌 2024-10-21
- 淮南汽车检测设备 2024-10-21
- 上海在线检测设备供应商家 2024-10-21




- 上海平坦度检测设备推荐 2024-10-21
- 湖州反射面检测设备品牌 2024-10-20
- 宁波反光面检测设备供应商 2024-10-20
- 绍兴反射面检测设备采购 2024-10-20
- 芜湖视觉检测设备 2024-10-20
- 温州汽车检测设备报价 2024-10-20





- 南通在线玻璃面型检测报价 11-05
- 南京工业玻璃面型检测联系方式 11-05
- 吉林汽车面漆检测设备质量好价格忧的厂家 11-05
- 景德镇非隧道式汽车面漆检测设备生产厂家 11-05
- 沈阳全自动汽车面漆检测设备哪家好 11-05
- 太原代替人工汽车面漆检测设备源头厂家 11-05
- 杭州高铁玻璃面型检测报价 11-05
- 江苏代替人工新能源汽车外漆检测设备 11-05
- 淮南非隧道式汽车面漆检测设备 11-05
- 包头全自动汽车面漆检测设备价格 11-05