四向穿梭车的结构设计有哪些难度?一、需要借助于有限元来辅助分析,尤其整车的行驶稳定性分析目前只建立在工况模拟试验的基础上,还不能从理论上有体系地研究。1、整车的运动振动主要集中在驱动及液压部分,其轮轴及轴承上容易引起振动疲劳破坏,主要在于钢货架内配置的轨道存在接头及安装偏差,货架结构体也存在一定的弹性变形,车轮与轨道的接触刚度较大,易引起轮轨接触振动、车体振动,目前多采用包胶车轮等措施来优化轮组共振。二、电池高容量技术,电池技术是影响四向穿梭车应用的关键技术之一。因为四向穿梭车存储搬运的托盘单元货物荷载重,单位运行路程的功耗大,每次完全充电能满足的工作时间成为四向穿梭车普遍应用的一个瓶颈。有效地监测到四向穿梭车的锂电池健康状态及充放电性能,也是保证托盘四向穿梭式自动化密集仓储系统全自动化的关键技术之一,而高性能高容量的电池价格昂贵,使得四向穿梭车的制造成本居高不下。四向智能穿梭车是一款可以实现纵向行走也可以实现横向行走的搬运设备。密集库四向穿梭机器人直销
四向穿梭车采用纯机械结构,产品使用生命周期长,同时采用机械顶升设计,无液压结构密封圈老化风险,无需频繁更换液压油,维保成本低,更加节能高效。四向穿梭车可以兼容两向穿梭板货架,降低了智能立库升级成本;同时其自动除尘系统可以适应更加复杂的环境。四向穿梭车解决了传统穿梭车不能横向移动的问题,这也是四向穿梭车比较好的特点。四向穿梭车具有四个方向的移动能力,这也决定了四向穿梭车具有更大的应用范围和更大的灵活性,同时系统的安全性、稳定性更高。比如某一小车出现问题后,四向穿梭车可以随意变更巷道,增减穿梭车的数量来调节而不会影响系统整体的进出库能力。机械结构四向穿梭车维保四向穿梭车通过在传统货架加装高精度导轨,使智能四向穿梭车可以在货架中自由穿行。

四向穿梭车狭义的定义:四向穿梭车是指能在平面内四个方向(前、后、左、右)穿梭运行的存储机器人,主要是区别于传统的两向穿梭车(前进和后退)而言的。与AGV相比较,穿梭车机器人需要在轨道上运行,这是它的劣势,也是其优势。即在固定轨道上运行时,小车的速度将更快,定位将更加准确,控制又相对简单,这都是AGV系统做不到的。四向穿梭车根据其处理的单元型式不同,主要分为料箱式穿梭车和托盘式穿梭车两种型式。这两种型式各自具有不同的特点。
四向穿梭车出库方式介绍:1、跟入库一样,四向穿梭车待命;2、确定四向穿梭车的取货地点后,WCS系统根据四向穿梭车的当前位置和目的地位置,将取货任务发送给四向穿梭车;3、根据收到的任务指令,四向穿梭车开始取货;4、在交叉轨道上,四向穿梭车通过实际距离以位移模式运行,在运行过程中不断扫描穿过车体下部的轨道。每通过一个路口位置,通过扫描轨迹判断检查运行距离,接近目的地时,通过侧向激光传感器微调停车位置,实现准确定位控制和停车;5、在子通道,四向穿梭穿梭车扫描十字轨道和侧面对中镜的反光贴,通过扫描这些点来判断行驶距离,从而实现在子通道的精确定位控制,到达目的地。四向穿梭车存货的原理是将四向穿梭车放置在托盘下的货架轨道上。

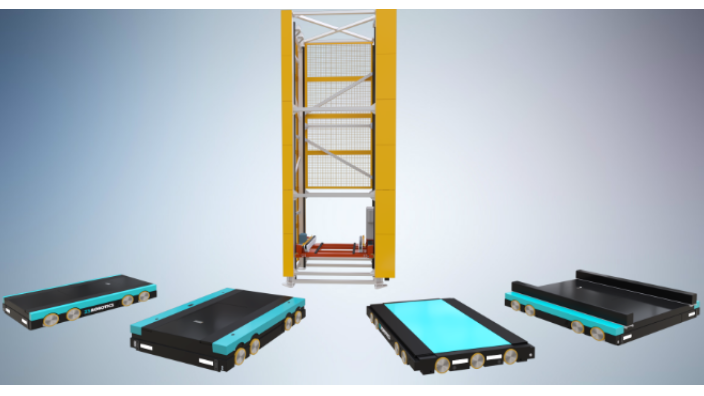
智世四向穿梭车特点:1、在立体式的交叉轨道上纵向、横向行驶位移托盘货物;2、自动变换巷道和换层;3、当碰到障碍物或者走到尽头会自动停止并做出相应的反应,选择较佳的行走路线;4、智世四向穿梭车货架系统的安全性、稳定性更高;5、能够自动检测电量,当电量不足时能够自动到充电位置充电,无需人工检测;6、当任一智世四向穿梭车出现故障时,其他智世四向穿梭车可以过来继续完成操作任务,系统也可以通过提升机、7、衔接设备等来继续完成作业,使系统能力几乎不受到任何影响;8、既适合低流量高密度的存储,也适合高流量高密度的存储和拣选。四向穿梭车系统通过灵活调整穿梭车的作业巷道,将巷道与提升机“解绑”。密集库四向穿梭机器人直销
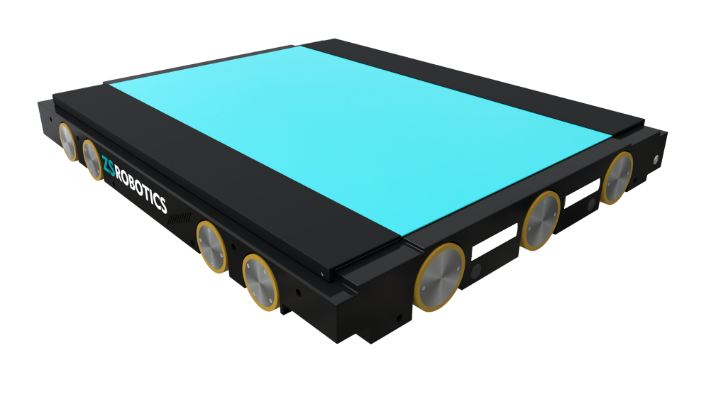
四向穿梭车主要用于仓库托盘货物的自动搬运和输送。密集库四向穿梭机器人直销
四向穿梭车有哪些特点?定位:穿梭车的定位一般采用条形码和端点开关定位。定位精度要求达到3mm以内。比AGV简单的是,因为在固定轨道上运行,穿梭车不需要导航系统。调度系统:对四向穿梭车来说,一个作业区域往往会有多台车同时作业,如何提升系统的总体效率,需要对小车进行作业调度。调度的内容包括:车况识别,选用什么车,路线规划等。车越多,调度越重要。难度也越大。穿梭车系统相对于传统的立体存储系统来说,货架是其比较大的变化。小车经过的所有路径均需要铺设轨道,转折路口还要有特制的转接板,以及每辆小车均需要有充电点,这是四向穿梭车的特点。密集库四向穿梭机器人直销