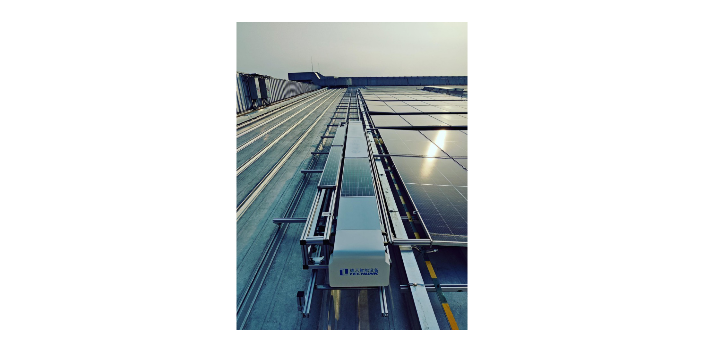
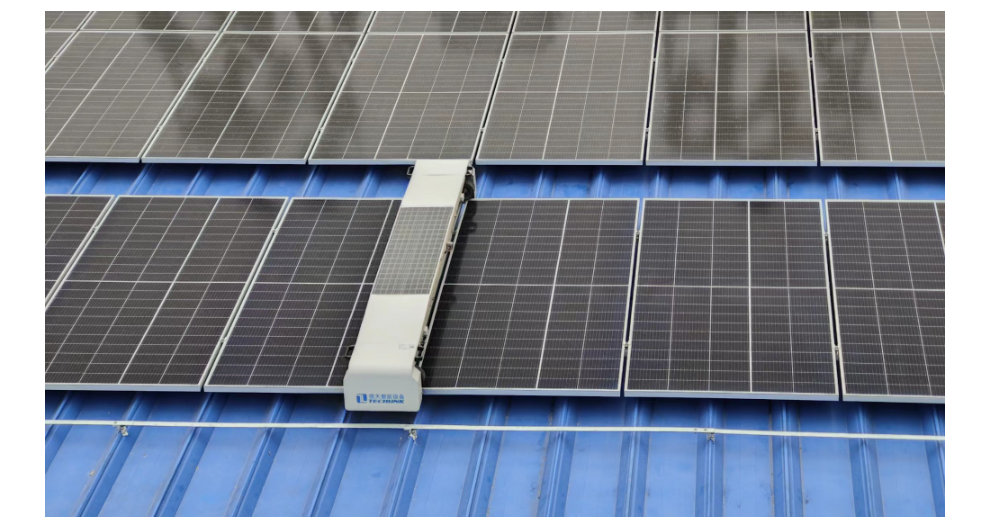
工商业分布式机器人适合规则排布的工商业电站,柔性支架。地面集中式轨道机器人,适合地面集中式电站、渔光互补、农光互补、海上电站等等。摆渡车,适合组件数量相同,规格相同,排列整齐的电站。平单轴,适合跟踪之家电站。德堒共享便携式系列(s400、s500、b32l)适合工商业电站、BIPV电站、车棚电站、15度内的渔光互补,农光互补当然也能用。德堒B22G,适合工商业电站、车棚电站等等。欢迎大家咨询我们,有专业的销售为您解答任何疑问。 它还能实现自动跨越组件障碍或者自动“爬坡”,确保清洁的效力。广东光伏智能清洗机器人品牌

到底什么样的清洗方式适合你的电站?工商业分布式分布式轨道机器人,适合规则排布的工商业电站,柔性支架。地面集中式轨道机器人,适合地面集中式电站、渔光互补、农光互补、海上电站等等。摆渡车,适合组件数量相同,规格相同,排列整齐的电站。平单轴,适合跟踪之家电站。德堒共享便携式系列(s400、s500、b32l)适合工商业电站、BIPV电站、车棚电站、15度内的渔光互补,农光互补当然也能用。德堒B22G,适合工商业电站、车棚电站等等 山西光伏运维机器人行走驱动装置采用模块化设计,由大功率直流电机驱动,具有较强的地形适应能力。
国国内机器人“SUNBOT子母式跨阵列作业光伏清洁机器人”获评2020年度浙江省装备制造业重点领域首台(套)产品,这是2014年至今,国自的机器人产品第五次获得省首台(套)认定。近年来,我国积极推动可再生能源的应用,光伏发电产业发展迅速。国自机器人“子母式跨阵列作业光伏清洁机器人”创造性的采用搬运机器人与清洁机器人协同的工作方式,根据不同的光伏电站特性,配置相应的机器人组合,灵活高效的实现光伏电站的无人化清洁。欢迎咨询。
回归分析的基本条件。应用一组已知的自变量数据去估计、预测一个因变量之值时,这两种变量需要满足以下两个条件:***,统计相关关系。统计相关关系是一种不确定的函数关系,即一种因变量(预测变量)的数值与一个或多个自变量的数值明显相关但却不能精确且不能***确定的函数关系,其中的变量都是随机变量。经济现象中这种相关关系是大量存在的。第二,因果关系。如果一个或几个自变量x变化时,按照一定规律影响另一变量y,而y的变化不能影响x,即x的变化是y变化的原因产品在各类条件下都可稳定工作,同时具备抗风、防水及防尘等性能。

光伏清扫机器人进行清扫工作的时候,机器速度越快越好吗?飞机的起飞靠的就是速度,速度越快,空气流通的速度越快,就更容易起飞。也就是为什么飞机飞行前要在跑道上行驶一段距离。机器人也是同理。机器人速度越快,它的滚刷就越容易翘起,与组件表面不接触,自然清洗不干净组件表面。光伏电站的清扫,不能只单纯的看机器清扫的速度,而是看清扫之后发电量提升的效果。德堒履带机器人将机器行驶速度,毛刷转速达到平衡,让机器走过的每一块板子都能够一次性清扫洁净,干刷达到scp5水洗达到scp3是能够向客户承诺的标准,而非只是肉眼观察,觉得干净就干净了。 技术和机械结构设计化,能够承受12级强风。西藏智能清扫机器人厂家价格
清洁机器人同样可实现自动跨越障碍或自主 “爬坡”,确保清洁效能。广东光伏智能清洗机器人品牌
确定目标明确目的,是开展光伏板清扫机器人发展前景预测工作的第一步,因为预测的目的不同,预测的内容和项目、所需要的资料和所运用的方法都会有所不同。明确预测目标,就是根据光伏板清扫机器人企业经营活动存在的问题,拟定预测的项目,制定预测工作计划,编制预算,调配力量,组织实施,以保证光伏板清扫机器人发展前景预测工作有计划、有节奏地进行。总之,光伏板清洁运维机器人是当前解决光伏板清洁和维护问题的重要手段。随着技术的不断升级和创新,相信机器人的应用将越来越***和成熟,为可持续能源的发展贡献更多的力量。 广东光伏智能清洗机器人品牌