传统安全光栅只能形成一条或几道光束组成的平面屏障,存在明显间隙,人员可能弯腰、侧身绕过而不被检测。大德恒通防撞传感器采用3D立体空间成像技术,在三维空间内构建完整的防护“体”,而非简单的“线”或“面”。无论人员以何种姿态进入——站立、蹲下、侧身还是伸手——传感器都能准确捕获并触发报警。这种立体防护能力对于机械手下行区域、冲压机周边等高风险场景尤为重要。用户可在软件中自由调整防护区域的长、宽、高,甚至设置多个不同高度的**检测层,真正做到“无死角覆盖,立体化防护”。抗强光、抗电磁干扰,多台设备共场稳定工作。重庆机器人防护传感器智能调节
立体空间防护传感器在饮料灌装生产线中用于检测空瓶输送是否堵塞。空瓶经过洗瓶机后由螺旋分瓶器送入灌装机的进瓶星轮。传感器安装在输瓶链道上方,向下检测瓶子通过情况。链道正常运行时瓶子连续通过,传感器输出持续的脉冲信号。脉冲频率由控制器监测。脉冲频率低于正常值的百分之五十时,表示上游来瓶不足。脉冲频率高于正常值的百分之一百五十时,表示下游有堵塞导致瓶子堆积。控制器根据频率变化判断堵塞位置,启动对应位置的震动器或调整输瓶链道速度。传感器采用漫反射光电原理,检测距离为50至200毫米可调。瓶身为透明PET材料,普通光电传感器难以可靠检测。该传感器使用蓝光LED作为光源,波长470纳米。透明材料对蓝光的吸收率较高,反射信号强度足以触发输出。传感器灵敏度通过电位器调节,对透明瓶和有色瓶均能检出。在灌装区域湿度较高的环境下,传感器窗口定期加热防止结露。加热功率为2瓦,由温度控制器自动启停。维护人员每月使用标准反射板验证传感器检测距离,反射板由陶瓷制成,反射率稳定。河北龙门桁架机器人安全防护传感器可切换多场景防护区域内置高算力芯片,本地完成智能计算,数据安全有保障。

自动复位和手动复位是两种常见的安全设备复位方式,适用于不同的管理场景。大德恒通防撞传感器同时支持两种模式,用户可根据实际需求选择。自动复位模式下,人员离开危险区域后传感器自动恢复输出,设备可继续运行,适合连续自动化产线,减少人工干预。手动复位模式下,人员离开后传感器仍保持报警状态,需要操作人员按下复位按钮才能***报警并恢复设备运行,适合高危设备或需要人工确认安全后才能重启的场景。用户还可通过绿色复位线灵活接线,实现两种模式的切换或组合使用。
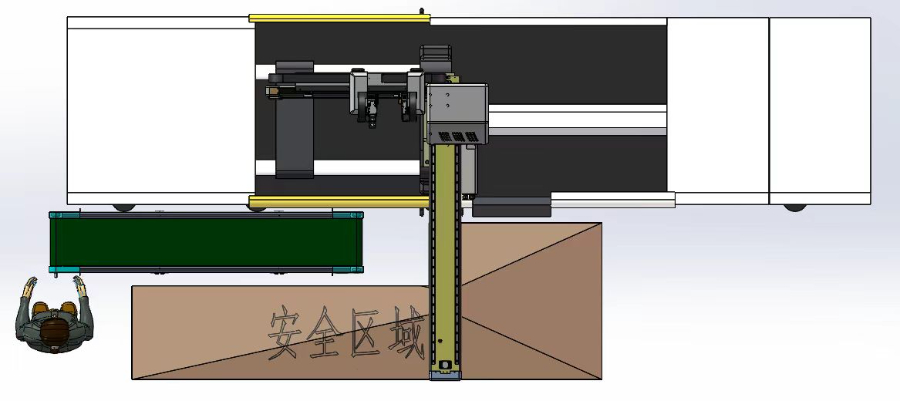
注塑机械手已成为生产标配,但其在模外放置产品时,机械臂下行区域存在较大安全隐患。如果加装物理围栏,虽然能挡住人员,但也给维修、调试、换模等操作带来极大不便,很多企业甚至为了效率而“拆了装、装了拆”,**终形同虚设。大德恒通针对这一痛点,研发出**的防撞传感器。安装在机械手横梁下方后,传感器持续检测下行区域。一旦有人员误入,传感器立即报警并让机械手暂停或停止,待人员离开后自动恢复或手动复位。这一方案既不占用地面空间,也不影响正常作业,同时实现了24小时主动防护。安装前后对比明显:安装前需要反复培训、监督、提醒;安装后,设备本身具备了“防撞意识”,人员疲劳或大意时也能得到可靠保护。这正是防撞传感器在工业安全领域不可替代的价值——用技术替代人盯人,用智能消除盲区。简化布线,标准线序设计,降低安装与维护复杂度。

室外龙门吊设备在港口或货场中吊运集装箱。龙门吊的跨度可达30米以上,起升高度超过20米。立体空间防护传感器安装在龙门吊的小车架体上,向下监测地面区域。地面有作业人员指挥集装箱落位,也有牵引车进出。传感器实时测量小车下方地面上的障碍物高度。当传感器检测到地面某处高度高于地面基准面300毫米时,判断该处有人员或车辆。小车横移时自动避开该区域。如果落箱位置有障碍物,传感器输出信号禁止起升机构下降。操作室内的显示器上标注出障碍物位置坐标。操作人员可以手动调整小车位置避开障碍。传感器采用多波束激光雷达技术,单次扫描产生超过200个测距点。这些测距点构成地面的高度分布图。高度分布图每秒更新5次,小车移动速度较慢时仍能获取连续的地形信息。传感器外壳防护等级为IP69K,能承受高压水枪冲洗。港口环境中的盐雾腐蚀通过外壳表面涂覆的防腐蚀涂层来抵御。涂层厚度为80微米,划格测试达到0级标准。支持多机同时工作,抗干扰算法,适应复杂生产场景。青海机器人失控传感器
输出方式灵活,支持多组输入输出,便于设备联动控制。重庆机器人防护传感器智能调节
立体空间防护传感器在协作机器人打磨工位中用于区分人体与工件。打磨机器人末端装有气动打磨头,工件固定在台面上。操作人员需要手持工件在打磨头上进行去毛刺作业。传感器安装在机器人底座上方1.2米高度处,向下倾斜15度角探测。传感器能够识别操作人员的手臂和工件之间的差异。手臂表面覆盖工作服,红外反射率较低。工件表面为金属或塑料,红外反射率较高。传感器接收回波强度时,根据反射率差异判断目标的类别。当检测到低反射率目标靠近打磨头时,机器人降低转速。当检测到高反射率目标靠近时,机器人保持正常转速。这种区别处理使操作人员可以安全地手持工件靠近打磨头,而手臂接触打磨头时机器人立即停止。传感器的识别算法在出厂时预置了多种材料的反射率参数。用户也可以自行录入新材料的反射率数据。传感器的探测频率为每秒20次,能够捕捉快速运动的手臂轨迹。安装底座上有角度刻度盘,方便调整探测角度并记录位置。重庆机器人防护传感器智能调节
深圳市大德恒通科技有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在广东省等地区的机械及行业设备行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**深圳市大德恒通科技供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!