在一个实施例中,激光位移传感器通过调整成像物镜6与感光元件7之间的距离,在空间频率为62.5lp/mm处,MTFS大于10倍的MTFT,其中,MTFS为量程内被测点在S方向的MTF值,MTFT为量程内被测点在T方向的MTF值,曲线1为物点在子午方向和弧矢方向上都没有偏离的MTFT值,曲线2为物点在子午方向和弧矢方向上都没有偏移的MTFS值;曲线3为物点在弧矢方向偏离-2.1mm、在子午方向无偏离的MTFT值;曲线4为物点在弧矢方向偏离-2.1mm、在子午方向无偏离的MTFS值;曲线5为物点在弧矢方向偏离2.1mm、在子午方向无偏离的MTFT值;曲线6为物点在弧矢方向偏离2.1mm、在子午方向无偏离的MTFS值(其中,在弧矢方向内,向光轴以里偏离为正,向光轴以外偏离为负)。在一具体实施例中,在空间频率为62.5lp/mm处,量程内被测点的MTFS≥0.5,MTFT<0.05。类似地,在采用上述方式1的情况CN10685539 1B6下,同样可以保证成像物镜的MTFT和MTFS满足这些条件。为什么要使用激光位移传感器呢?虹口区激光位移传感器调试

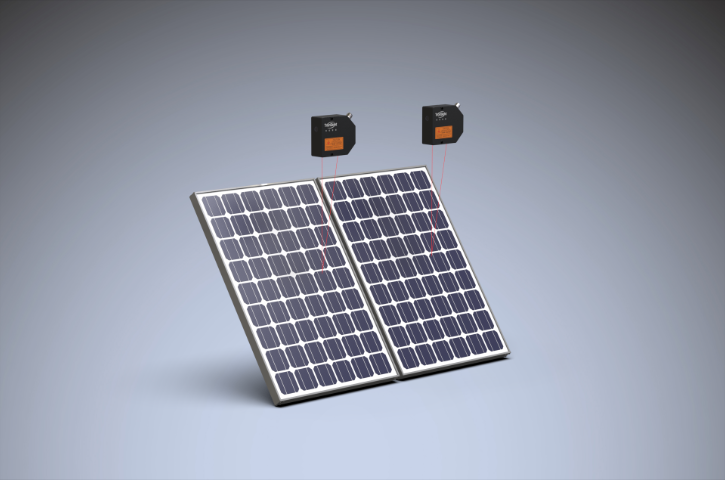
针对目前国内自主研制的激光位移传感器精度低,测量范围小等问题,提出了一种采用光学设计软件预先仿真整个激光位移传感器光学系统的方法。在分析系统各部分的光学特性的基础上,结合具体要求设计了一个激光位移传感器的光学系统,其工作范围为(50±10)mm。采用系统分割的方法,将整个光学系统分为两部分进行设计,No.1部分是激光束的整形透镜,要求在有效的工作范围内得到小而均匀的出射光斑,设计结果表明,在测量范围内,光斑大小能够控 制在10-1mm量级;另一部分是被测面散射光接收的成像物镜,该系统的特点是物面和像面相对于光轴都有一定的角度,实验结果表明其成像满足Scheimpflug条件。 虹口区激光位移传感器产品基本性能要求激光位移传感器可以用于测量光学元件的位置和形状。

激光位移传感器的测量精度容易受到被测物体表面特征的影响,为了减小测量误差,在整形镜设计中应尽量使出射光斑在有效的测量范围内实现光斑小且均匀。针对传感头小型化设计的要求,半导体激光器体积小、重量轻的优点正好符合这一要求,但其光束质量并不理想,需要对其进行光束整形。半导体激光器快慢轴的光束分布极不对称:快轴发散角较大,半角的典型值为30~40°,光束呈高斯分布,发光范围的半宽度为0.6~0.8μm,慢轴发散角的半角典型值为3~6°,光束分布不规则,发光范围半宽度为50~100μm。因此,在不允许能量损失的情况下,要求整形系统的物方数值孔径(NA)>0.573;但由于光束的快轴能量呈高斯分布,通常取半宽度(FWHM)为20°,此时NA=0.342。系统物距应尽量小一些,但考虑到工艺问题,不宜过小,选定为2.5mm。为了便于设计,将系统倒置,整个系统的主要要求为:工作波长为785±10nm,像方NA=0.342,像距l′=2.5mm,物距l=40~60mm,焦距f=3~4mm。
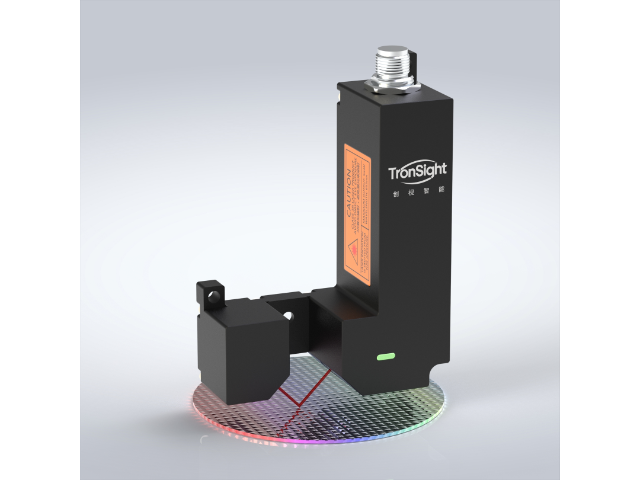
方式[0019]请参照图1所示,本实用新型激光位移传感器检验校准装置100的较佳实施例,包括一可伸缩导轨1、一微调装置2、一传感器夹持装置3、一激光位移传感器4以及一激光红外线接收挡板5;所述微调装置2和传感器夹持装置3设于所述可伸缩导轨1的上端;所述激光位移传感器4夹持在所述传感器夹持装置3上,且使所述激光位移传感器4的激光发射端朝向所述微调装置2;所述激光红外线接收挡板5与所述微调装置2固接,且使所述激光红外线接收挡板5的接收面朝向所述传感器夹持装置3。激光位移传感器可以用于测量机械零件的尺寸和形状。
提高采样频率,利用前一次采样得到的结果,分析判断物体表面的反射光强,然后适时调整激光器发射的激光束的强度,以减小由于反射光强变化大而产生的测量误差。这种方法在很大限度上改进了由于饱和产生的误差,但仍然无法从根本上解决由于物体表面在激光光斑散射的小范围内的反射率不同以及由于存在表面颗粒变化导致成像光斑不对称等因素产生的测量误差。本实用新型的目的在于对现有技术存在的问题加以解决,提供一种结构合理、使用方便、可减小甚至消除路面检测过程中由于成像光斑不均匀或不对称产生的测量误差,进而有效提高位移检测精度的道路检测激光位移传感器。非接触式位移传感器的出现推动了现有技术的适应,以满足新的测量要求并提高测量的准确性和分辨率。普陀区激光位移传感器常见问题
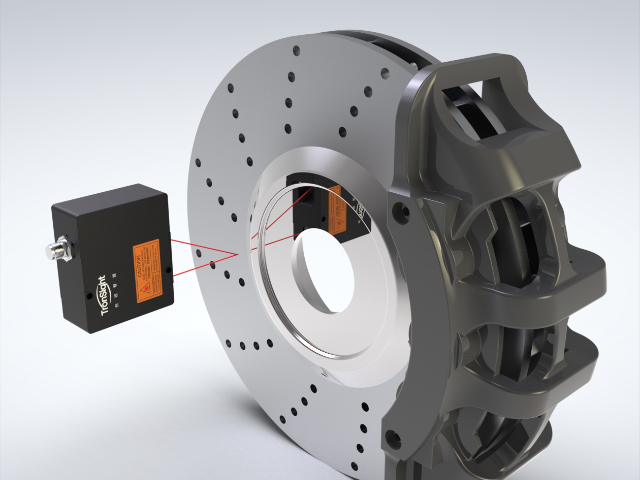
激光位移传感器在汽车行业的应用案例。虹口区激光位移传感器调试
针对相关技术中的问题,本发明提出一种激光位移传感器,能够在不影响测量精度的情况下,降低成像物镜的设计难度,同时让测量系统能够更有效地应对振动、机械变形等不良影响。根据本发明,提供了一种激光位移传感器。根据本发明的激光位移传感器包括激光器、成像物镜以及感光元件,激光器用于射出激光束,由成像物镜接收并出射的光入射到感光元件。其中,在对成像物镜和感光元件CN1 06855391B3进行调制传递函数MTF解析时,解析结果满足以下条件:[0011]在感光元件的多个感光单元的主要排列方向为弧矢方向的情况下,MTFS>MTFT;在感光元件的多个感光单元的主要排列方向为子午方向的情况下,MTFT>MTFS;其中,MTFS为弧矢方向上的MTF值,MTFT为子午方向上的MTF值。进一步地,在进行解析时,空间频率为62.5lp/mm,如果多个感光单元的主要排列方向为弧矢方向,则MTFS>MTFT×10;如果多个感光单元的主要排列方向为子午方向,则MTFT>MTFS×10。[0015]可选地,空间频率为62.5lp/mm,如果多个感光单元的主要排列方向为弧矢方向,则MTFS≥0.5,MTFT<0.05;如果多个感光单元的主要排列方向为子午方向,则MTFT≥0.5,MTFS<0.05。虹口区激光位移传感器调试